1.本实用新型属于工业机械人领域,尤其是涉及一种高精度自润滑地轨机器人。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人被广泛应用于电子、物流、化工等各个工业领域之中,在零件自动筛选机器人应用中,负责抓取零件的机械手臂需要在地轨上高强度的反复滑动,为了保障地轨上滑台的润滑度,需要定期停机向滑轨及其他传动组件添加润滑油脂,而高频次的停机造成设备的利用率降低,同时多频次停机维护容易导致设备的传动故障和精度降低,影响筛分的准确性。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种高精度自润滑地轨机器人,以解决现有技术的工业机器人需要定期停机添加润滑油脂,造成设备利用率低的问题。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.一种高精度自润滑地轨机器人,包括地轨组件、工作滑台、机械手、动力源、自润组件和检测传感器,地轨组件的上端滑动连接工作滑台,工作滑台上端分别固定安装机械手、动力源和自润组件,动力源的一端穿过工作滑台啮合至地轨组件内部安装的齿条,且地轨组件的内部安装用于检测工作滑台相对位置的检测传感器,自润组件的出油端分别通过油管连接至地轨组件内部、动力源内部和机械手内部。
6.进一步的,所述地轨组件还包括底座、滑轨和缓冲器,底座上端分别安装滑轨和齿条,滑轨和齿条相互平行设置,工作滑台下端设置滑块,滑块下端设有滑槽,滑轨外围滑动连接至滑槽内,且滑槽内部通过油管连接至自润组件,底座两侧分别安装缓冲器,且每个缓冲器的一端均接触连接至滑台的一侧。
7.进一步的,所述底座上端设置传感器线板,且传感器线板与齿条相互平行设置,检测传感器安装至传感器线板的上端,工作滑台的下端安装挡片,检测传感器用于检测挡片的相对位置。
8.进一步的,所述自润组件包括润滑泵及其一端安装的分配器,润滑泵的外围固定安装至工作滑台的上端,分配器上设有若干出油口,每个出油口上安装一个油管。
9.进一步的,所述动力源包括减速器和减速齿轮,减速器外围固定连接至工作滑台,减速器的下端穿过工作滑台后固定安装减速齿轮,减速齿轮外围啮合至齿条的一侧,自润组件还包括润滑齿轮,润滑齿轮与减速齿轮相互平行设置,润滑齿轮上端套接至工作滑台的下端,润滑齿轮外围啮合至齿条的一侧,润滑齿轮设有润滑油道,润滑油道连通至一个油管。
10.相对于现有技术,本实用新型所述的一种高精度自润滑地轨机器人具有以下有益效果:自润组件用于为地轨组件的传动部件、减速器内的减速齿轮和机械手的活动关节实
时提供润滑油,确保该机器人得到充分润滑,增加其使用寿命,同时减少添加润滑油的维护工作,避免因需润滑而造成的停机维护,提高设备的利用率,减少人员对设备的干预。
附图说明
11.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
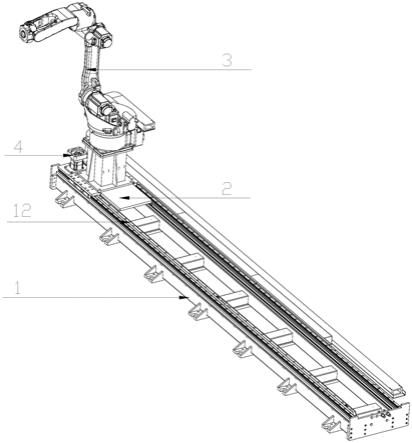
12.图1为本实用新型实施例所述的一种高精度自润滑地轨机器人的结构示意图;
13.图2为本实用新型实施例所述的一种高精度自润滑地轨机器人正视图;
14.图3为本实用新型实施例所述的一种高精度自润滑地轨机器人去除机械手的上视图;
15.图4为本实用新型实施例所述的工作滑台、动力源和自润组件装配的结构示意图。
16.附图标记说明:
17.1-地轨组件;11-底座;12-齿条;13-滑轨;14-缓冲器;2-工作滑台;3-机械手;4-动力源;41-减速器;42-减速齿轮;5-自润组件;51-润滑泵;52-分配器;53-润滑齿轮。
具体实施方式
18.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
19.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
20.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
21.下面将参考附图并结合实施例来详细说明本实用新型。
22.如图1-4所示,一种高精度自润滑地轨机器人,包括地轨组件1、工作滑台2、机械手3、动力源4、自润组件5和检测传感器,地轨组件1的上端滑动连接工作滑台2,工作滑台2上端分别固定安装机械手3、动力源4和自润组件5,动力源4包括减速器41和减速齿轮42,减速器41是现有技术的减速电机,减速器41外围固定连接至工作滑台2,减速器41的下端穿过工作滑台2后固定安装减速齿轮42,减速齿轮42外围啮合至齿条12的一侧,减速器41信号连接至机械手3的控制器,机械手3的型号是mh12工业机器手臂,控制器控制减速器41转动,齿条
12将减速器41的转动转换为滑台的线性位移,地轨组件1的内部安装检测传感器,检测传感器的型号是azxsk20-25-m5,检测传感器的信号连接至机械手3的控制器,检测传感器用于检测工作滑台2的相对位置,自润组件5的出油端分别通过油管连接至地轨组件1内部、减速器41内部和机械手3内部,自润组件5用于为地轨组件1的传动部件、减速器41内的减速齿轮42和机械手3的活动关节实时提供润滑油,确保该机器人得到充分润滑,增加其使用寿命,同时减少添加润滑油的维护工作,避免因需润滑而造成的停机维护,提高设备的利用率,减少人员对设备的干预。
23.地轨组件1还包括底座11、滑轨13和缓冲器14,底座11上端分别安装滑轨13和齿条12,滑轨13和齿条12相互平行设置,工作滑台2下端设置滑块,滑块下端设有滑槽,滑轨13外围滑动连接至滑槽内,且滑槽内部通过油管连接至自润组件5,自润组件5实时为滑轨13与滑块之间添加润滑油,确保此部分传动部件的润滑度,底座11两侧分别安装缓冲器14,且每个缓冲器14的一端均接触连接至滑台的一侧,缓冲器14是现有技术的液压缓冲器14,缓冲器14用于防止工作滑台2与底座11的硬性接触造成的设备变形、使用寿命变低和移动精度变差的问题。
24.底座11上端设置传感器线板,且传感器线板与齿条12相互平行设置,检测传感器安装至传感器线板的上端,传感器线板内设置布线槽,检测传感器的信号线布设至布线槽内,防止传感器信号杂乱布设,同时在工作滑台2的下端安装挡片,检测传感器用于检测挡片的相对位置,以此却定工作滑台2、机械手3的相对位置。
25.自润组件5包括润滑泵51及其一端安装的分配器52,分配器52是一分六的油气分配器52,润滑泵51的外围固定安装至工作滑台2的上端,润滑泵51内添加油脂,且油脂通过润滑泵51增压后释放到分配器52的进料端,分配器52上排列多个出油口,每个出油口上安装一个油管,润滑泵51信号连接至机械手3的控制器。
26.为了确保齿条12与减速齿轮42的同步润滑,同时不降低减速齿轮42的结构强度,自润组件5还包括润滑齿轮53,润滑齿轮53与减速齿轮42相互平行设置,润滑齿轮53上端套接至工作滑台2的下端,润滑齿轮53外围啮合至齿条12的一侧,润滑齿轮53设有润滑油道,润滑油道连通至一个油管,润滑泵51内的油脂经分配器52、油管、润滑油涂布至齿条12的锯齿内。
27.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。