1.本实用新型涉及机械手技术领域。
背景技术:
2.物流工业机器人,主要是指通过机械臂完成对物品的转移;现有的机械臂包括两个用于夹紧物品的夹持臂;使用前,需要将物品从两个夹持臂的间隙处直接转移至于两个夹持臂之间,使用时,再控制两个夹持臂相向运动,进而完成对物品的夹紧;但实际操作过程中,由于厂房的内部结构或物品转移设备的限制,使得物品只能从侧边的方向转移至两个夹持臂之间,而现有的两个夹持臂高度一致,导致物品不能从侧边的方向转移至两个夹持臂之间,实用性差。
技术实现要素:
3.本实用新型意在提供一种多功能物流工业机器人,以解决目前物品只能从两个夹持臂的间隙处直接转移至于两个夹持臂之间,但由于厂房的内部结构或物品转移设备的限制,使得物品只能从侧边的方向转移至两个夹持臂之间,而现有的两个夹持臂高度一致,导致物品不能从侧边的方向转移至两个夹持臂之间的问题。
4.为了达到上述目的,本实用新型的基础方案如下:一种多功能物流工业机器人,包括机座、第一夹持臂和第二夹持臂,还包括滑块,第一夹紧臂固接于滑块的底部,第一夹紧臂的底部位于第二夹紧臂的底部下方;滑块的底部设有横向槽,且横向槽内滑动连接有用于带动第二夹紧臂朝向第一夹紧臂方向运动的活动块;还包括用于带动滑块在机座上横向往复运动的动力机构、用于带动活动块横向往复运动的驱动机构和随活动块横向移动而带动第二夹紧臂竖向移动的联动机构。
5.基础方案的优点:本方案工作时,由于第一夹紧臂的底部位于第二夹紧臂的底部下方,因此,物品能够从侧边的方向转移至第一夹紧臂与第二夹紧臂之间,即物品能经过第二夹紧臂的下方转移至第一夹紧臂与第二夹紧臂之间;当物品位于第一夹紧臂与第二夹紧臂之间时,通过驱动机构带动活动块向第一夹紧臂的方向移动,进而第二夹紧臂向第一夹紧臂的方向移动;活动块向第一夹紧臂的方向移动期间,通过联动机构带动第二夹紧臂向下移动,使得第一夹紧臂和第二夹紧臂与物品的两侧相抵,以此实现对物品的夹紧;完成对物品的夹紧后,通过动力机构滑块横向滑动至目的地,再通过驱动机构带动活动块反向移动,进而对物品的夹持作用消失,便于工作人员取拿;相较于现有技术,本方案物品既能从侧边的方向转移至第一夹紧臂与第二夹紧臂之间,物品也能从两个夹持臂的间隙处直接转移至于两个夹持臂之间,进而能够适用于不同的场所,实用性强。
6.进一步,联动机构包括开设在横向槽内的倾斜槽和与倾斜槽滑动连接的升降杆,倾斜槽靠近第一夹紧臂的一端高度小于倾斜槽另一端的高度,升降杆的顶部与倾斜槽相抵,且升降杆与活动块竖向滑动连接;升降杆与活动块的底部之间设有第一弹簧,升降杆的底部与第二夹紧臂固接。
7.通过上述设置,活动块沿横向槽的路径向第一夹紧臂的方向移动,进而活动块带动升降杆和第二夹紧臂第一夹紧臂的方向移动;活动块向第一夹紧臂的方向移动期间,由于倾斜槽靠近第一夹紧臂的一端高度小于倾斜槽另一端的高度,使得升降杆在倾斜槽的作用下向下移动,进而升降杆带动第二夹紧臂向下移动,第一弹簧拉伸。
8.进一步,滑块的底部设有竖向槽,且竖向槽位于第一夹紧臂与横向槽之间,竖向槽内滑动连接有竖向块;活动块的侧壁上铰接有摆臂,且摆臂的自由端与竖向块铰接。
9.通过上述设置,活动块向第一夹紧臂的方向移动期间,活动块通过摆臂带动竖向块沿竖向槽的路径向上移动,因此,竖向块通过摆臂能够活动块的移动起到导向作用,进而提高活动块移动的稳定性。
10.进一步,第一夹紧臂上贯穿有负压孔,还包括随竖向块竖向移动而让负压孔产生负压的负压机构。
11.通过上述设置,竖向块向上移动期间,第二夹紧臂向第一夹紧臂的方向移动;当第一夹紧臂和第二夹紧臂完成对物品的夹紧后,通过负压机构让负压孔内产生负压,通过负压作用能够将物品与第一夹紧臂吸在一起,进而加强了对物品的夹紧效果,也提高了对物品夹紧的稳定性。
12.进一步,负压机构包括开设在滑块内的腔室和在竖向槽内滑动的联动块,腔室与竖向槽、负压孔相通,腔室内滑动连接有活塞块,且活塞块与联动块固接;联动块与竖向槽之间设有第二弹簧,且联动块位于竖向块的运动轨迹上;第二夹紧臂的自由端设有导向槽,且导向槽内滑动连接有导向块,导向块与导向槽之间设有第三弹簧。
13.通过上述设置,活动块向第一夹紧臂的方向移动期间,活动块通过摆臂带动竖向块沿竖向槽的路径向上移动;当第一夹紧臂和导向块与物品的两侧相抵时,竖向块的顶部与联动块的底部相抵;活动块继续向第一夹紧臂的方向移动,竖向块挤压联动块向上移动,使得第二弹簧压缩,联动块带动活塞块在负压孔内向上移动,使得负压孔内产生负压;当对物品夹紧时,通过负压作用能够将物品与第一夹紧臂吸在一起。
14.进一步,滑块上设有风机,且风机上连接有气管,气管的自由端朝向第一夹紧臂与第二夹紧臂的间隙方向设置。
15.通过上述设置,风机产生气流,气流经气管作用于被夹紧的物品上,能够实现对物品的除尘,提高物品的整洁度;因此,本方案能够从不同方向放入第一夹紧臂与第二夹紧臂之间,实用性更强,且本方案还能对物品起到除尘的作用,功能更多样化。
附图说明
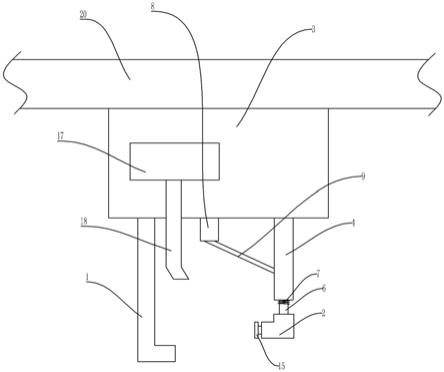
16.图1为本实用新型一种多功能物流工业机器人实施例的主视图;
17.图2为图1中滑块的剖视图。
具体实施方式
18.下面通过具体实施方式进一步详细说明:
19.说明书附图中的附图标记包括:第一夹持臂1、第二夹持臂2、滑块3、活动块4、倾斜槽5、升降杆6、第一弹簧7、竖向块8、摆臂9、负压孔10、腔室11、联动块12、活塞块13、第二弹簧14、导向块15、第三弹簧16、风机17、气管18、第二气缸19、机座20。
20.实施例
21.基本如附图1、附图2所示:一种多功能物流工业机器人,包括机座20、第一夹持臂1和第二夹持臂2,还包括滑块3,第一夹紧臂固接于滑块3的底部,初始状态时,第一夹紧臂的底部位于第二夹紧臂的底部下方;滑块3的底部开有横向槽,且横向槽内滑动连接有用于带动第二夹紧臂朝向第一夹紧臂方向运动的活动块4;还包括用于带动滑块3在机座20上横向往复运动的动力机构、用于带动活动块4横向往复运动的驱动机构和随活动块4横向移动而带动第二夹紧臂竖向移动的联动机构;本实施例中,动力机构为第一气缸,第一气缸固接在机座20上,且第一气缸的输出轴与滑块3固接;本实施例中,驱动机构为第二气缸19,第二气缸19固接在滑块3上,且第二气缸19的输出轴与活动块4固接。
22.联动机构包括开设在横向槽内的倾斜槽5和与倾斜槽5滑动连接的升降杆6,倾斜槽5靠近第一夹紧臂的一端高度小于倾斜槽5另一端的高度,升降杆6的顶部与倾斜槽5相抵,且升降杆6与活动块4竖向滑动连接;升降杆6与活动块4的底部之间固接有第一弹簧7,升降杆6的底部与第二夹紧臂固接。
23.滑块3的底部开有竖向槽,且竖向槽位于第一夹紧臂与横向槽之间,竖向槽内滑动连接有竖向块8;活动块4的侧壁上铰接有摆臂9,且摆臂9的自由端与竖向块8铰接。第一夹紧臂上贯穿有负压孔10,还包括随竖向块8竖向移动而让负压孔10产生负压的负压机构;负压机构包括开设在滑块3内的腔室11和在竖向槽内滑动的联动块12,腔室11与竖向槽、负压孔10相通,腔室11内滑动连接有活塞块13,且活塞块13与联动块12固接;联动块12与竖向槽之间设有第二弹簧14,且联动块12位于竖向块8的运动轨迹上;第二夹紧臂的自由端开有导向槽,且导向槽内滑动连接有导向块15,导向块15与导向槽之间固接有第三弹簧16。
24.具体实施过程如下:
25.工作时,由于第一夹紧臂的底部位于第二夹紧臂的底部下方,因此,物品能够从侧边的方向转移至第一夹紧臂与第二夹紧臂之间,即物品能经过第二夹紧臂的下方转移至第一夹紧臂与第二夹紧臂之间;并且,物品也能从两个夹持臂的间隙处直接转移至于两个夹持臂之间。
26.当物品位于第一夹紧臂与第二夹紧臂之间时,启动第二气缸19,第二气缸19的输出轴带动活动块4沿横向槽的路径向第一夹紧臂的方向移动,进而活动块4带动升降杆6和第二夹紧臂第一夹紧臂的方向移动;活动块4向第一夹紧臂的方向移动期间,由于倾斜槽5靠近第一夹紧臂的一端高度小于倾斜槽5另一端的高度,使得升降杆6在倾斜槽5的作用下向下移动,进而升降杆6带动第二夹紧臂向下移动,第一弹簧7拉伸。
27.活动块4继续向第一夹紧臂的方向移动,使得第一夹紧臂和导向块15与物品的两侧相抵;活动块4再继续向第一夹紧臂的方向移动,当第三弹簧16压缩至极限时,关闭第二气缸19,即哦通过第一夹紧臂和导向块15实现对物品的夹紧。
28.活动块4向第一夹紧臂的方向移动期间,活动块4通过摆臂9带动竖向块8沿竖向槽的路径向上移动;当第一夹紧臂和导向块15与物品的两侧相抵时,竖向块8的顶部与联动块12的底部相抵;活动块4继续向第一夹紧臂的方向移动,竖向块8挤压联动块12向上移动,使得第二弹簧14压缩,联动块12带动活塞块13在负压孔10内向上移动,使得负压孔10内产生负压;当对物品夹紧时,通过负压作用能够将物品与第一夹紧臂吸在一起,进而加强了对物品的夹紧效果,也提高了对物品夹紧的稳定性。
29.完成对物品的夹紧后,启动第一气缸,第一气缸的输出轴带动滑块3横向移动,进而带动物品转移至目的地,关闭第一气缸;启动第二气缸19,第二气缸19的输出轴带动活动块4反向移动,活动块4通过摆臂9拉动竖向块8向下移动,使得竖向块8对联动块12的作用消失,联动块12在第二弹簧14的作用下向下移动,联动块12带动活塞块13在负压孔10内向下移动,进而使得负压作用消失,即让第一夹紧臂与物品不会吸在一起;活动块4反向移动期间,活动块4带动升降杆6和第二夹紧臂反向移动,使得导向块15与物品分离,且升降杆6在第一弹簧7的作用下向上移动;以此,对物品的夹持效果消失,便于工作人员取拿。
30.本实施例中,滑块3上固接有风机17,且风机17上连接有气管18,气管18的自由端朝向第一夹紧臂与第二夹紧臂的间隙方向设置;风机17产生气流,气流经气管18作用于被夹紧的物品上,能够实现对物品的除尘,提高物品的整洁度;因此,本方案能够从不同方向放入第一夹紧臂与第二夹紧臂之间,实用性更强,且本方案还能对物品起到除尘的作用,功能更多样化。
31.以上所述的仅是本实用新型的实施例,方案中公知的具体结构和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。