1.发明涉及教学用机器人技术领域,尤其是涉及一种仿生结构的机器人。
背景技术:
2.随着人工智能技术、计算机技术等相关技术的发展,智能机器人的应用范围也越来越多。在教育领域,许多院校已在课堂上利用机器人进行简单的教学或者教学辅助,例如在进行黑板文书的书写,主要的书写工具为粉笔、白板笔等等。当书写工具为粉笔时,因为粉笔会随着使用时间越长,粉笔变短,在该机器人的机械手臂不进行伸展时,无法一直保持书写状态。
3.为了解决上述问题,发明提供了一种仿生结构的机器人。
技术实现要素:
4.发明的目的在于提供了一种仿生结构的机器人,解决了上述背景技术中提出的关于机器人在机械手臂不进行伸展的状态下,无法保持书写的问题。
5.为实现上述目的,发明提供如下技术方案:
6.一种仿生结构的机器人,包括从下往上依次设置的传动箱体、连接部、安装部、机器人本体,且所述传动箱体的两侧均设置有行走履带;所述机器人本体上包括机械手臂,且所述机械手臂远离机器人本体的一端设置有连接杆;
7.所述连接杆远离机器人本体的一端为空心结构;所述连接杆的空心处设置有若干组夹紧组件,且所述夹紧组件均朝向连接杆的中心轴设置;
8.所述连接杆与机械手臂的连接处设置有推杆,且所述推杆设置于连接杆的中心处。
9.进一步的,每组所述夹紧组件包括夹紧部,且所述夹紧部通过连接组件与连接杆的内壁相互连接。
10.进一步的,所述连接组件包括设置于连接杆内壁的内杆与设置于夹紧部上的外杆,且所述内杆与外杆同轴并空心设置;所述外杆滑动设置于内杆上,且连接杆的内壁与夹紧部之间设置有弹簧。
11.进一步的,所述夹紧部远离连接组件的一侧设置有连接垫。
12.进一步的,所述推杆位于夹紧部的一端设置有垫片。
13.与现有技术相比,发明的有益效果是:
14.本机器手臂上的夹紧组件能够对书写工具如:粉笔进行夹紧操作,以保证正常的书写;而推杆能够对粉笔进行推动,以保证机械手臂在没有动作的过程中,能够使得粉笔的尖端一直处于书写的状态;此设置保证了机械手臂书写的流畅,提高了教学过程中的教学效率。
附图说明
15.附图用来提供对发明的进一步理解,并且构成说明书的一部分,与发明的实施例一起用于解释发明,并不构成对发明的限制。
16.在附图中:
17.图1是发明中的结构示意图;
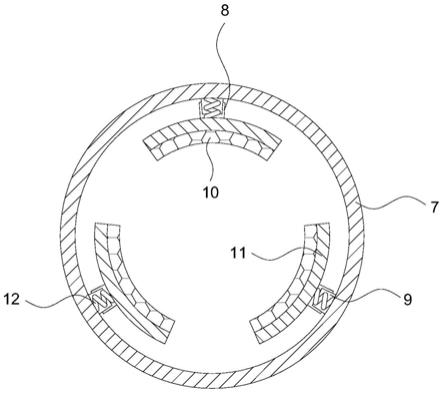
18.图2是发明中的剖视图一;
19.图3是发明中的剖视图二。
20.图中:1、传动箱体;2、行走履带;3、机器人本体;4、连接部;5、安装部;6、机械手臂;7、连接杆;8、外杆;9、内杆;10、连接垫;11、夹紧部;12、弹簧;13、推杆;14、粉笔;15、垫片。
具体实施方式
21.下面将结合发明实施例中的附图,对发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是发明的一部分实施例,而不是全部的实施例。基于发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于发明保护的范围。
22.发明提供以下技术方案:
23.如图所示,
24.一种仿生结构的机器人,包括从下往上依次设置的传动箱体1、连接部4、安装部5、机器人本体3,且所述传动箱体1的两侧均设置有行走履带2;所述机器人本体3上包括机械手臂6,且所述机械手臂6远离机器人本体3的一端设置有连接杆7,连接杆7的截面可以为圆环,也可以为多边形;
25.所述连接杆7远离机器人本体3的一端为空心结构;所述连接杆7的空心处设置有若干组夹紧组件,且所述夹紧组件均朝向连接杆7的中心轴设置,如果连接杆7的截面为多边形,则夹紧组件的数量可以与多边形的数量相同,也可以不同;
26.所述连接杆7与机械手臂6的连接处设置有推杆13,且所述推杆13设置于连接杆7的中心处,连接杆7给到夹紧与夹紧组件内的粉笔14一个向外的推力,在机械手臂6不发生移动或者形变的情况下,使得粉笔14能够一直能够保持书写状态。
27.进一步的,每组所述夹紧组件包括夹紧部11,且所述夹紧部11通过连接组件与连接杆7的内壁相互连接。
28.进一步的,所述连接组件包括设置于连接杆7内壁的内杆9与设置于夹紧部11上的外杆8,且所述内杆9与外杆8同轴并空心设置;所述外杆8滑动设置于内杆9上,且连接杆7的内壁与夹紧部11之间设置有弹簧12。
29.进一步的,所述夹紧部11远离连接组件的一侧设置有连接垫10。连接垫10可以为软性且光滑的,既能保护粉笔14,在推动粉笔14的情况下,还不会阻碍粉笔14的移动。
30.进一步的,所述推杆13位于夹紧部11的一端设置有垫片15。垫片15为软性材质,能够保护粉笔14免被破坏。
31.最后应说明的是:以上所述仅为发明的优选实施例而已,并不用于限制发明,尽管参照前述实施例对发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在发
明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在发明的保护范围之内。
技术特征:
1.一种仿生结构的机器人,其特征在于:包括从下往上依次设置的传动箱体(1)、连接部(4)、安装部(5)、机器人本体(3),且所述传动箱体(1)的两侧均设置有行走履带(2);所述机器人本体(3)上包括机械手臂(6),且所述机械手臂(6)远离机器人本体(3)的一端设置有连接杆(7);所述连接杆(7)远离机器人本体(3)的一端为空心结构;所述连接杆(7)的空心处设置有若干组夹紧组件,且所述夹紧组件均朝向连接杆(7)的中心轴设置;所述连接杆(7)与机械手臂(6)的连接处设置有推杆(13),且所述推杆(13)设置于连接杆(7)的中心处。2.根据权利要求1所述的一种仿生结构的机器人,其特征在于:每组所述夹紧组件包括夹紧部(11),且所述夹紧部(11)通过连接组件与连接杆(7)的内壁相互连接。3.根据权利要求2所述的一种仿生结构的机器人,其特征在于:所述连接组件包括设置于连接杆(7)内壁的内杆(9)与设置于夹紧部(11)上的外杆(8),且所述内杆(9)与外杆(8)同轴并空心设置;所述外杆(8)滑动设置于内杆(9)上,且连接杆(7)的内壁与夹紧部(11)之间设置有弹簧(12)。4.根据权利要求3所述的一种仿生结构的机器人,其特征在于:所述夹紧部(11)远离连接组件的一侧设置有连接垫(10)。5.根据权利要求4所述的一种仿生结构的机器人,其特征在于:所述推杆(13)位于夹紧部(11)的一端设置有垫片(15)。
技术总结
本发明涉及一种仿生结构的机器人,包括从下往上依次设置的传动箱体、连接部、安装部、机器人本体;所述机器人本体上包括机械手臂,所述机械手臂远离机器人本体的一端设置有连接杆;所述连接杆远离机器人本体的一端为空心结构;所述连接杆的空心处设置有若干组夹紧组件,所述夹紧组件均朝向连接杆的中心轴设置;所述连接杆与机械手臂的连接处设置有推杆,所述推杆设置于连接杆的中心处。本机器手臂上的夹紧组件能够对粉笔进行夹紧操作,以保证正常的书写;而推杆能够对粉笔进行推动,以保证机械手臂在没有动作的过程中,能够使得粉笔的尖端一直处于书写的状态;此设置保证了机械手臂书写的流畅,提高了教学过程中的教学效率。提高了教学过程中的教学效率。提高了教学过程中的教学效率。
技术研发人员:张安佶
受保护的技术使用者:张安佶
技术研发日:2021.12.09
技术公布日:2022/2/15