1.本发明涉及家用机器人领域,具体涉及一种家庭宠物粪便清理机器人。
背景技术:
2.随着我国经济的发展,城市面貌发生了天翻地覆地变化,然而在我们享受城市面容的同时,宠物粪便带来的环境和社会问题也愈发的突出。宠物粪便的存在给城市的清洁工作带来了很大麻烦,给社区居民的出行生活带来困扰。粪便里含有的细菌、寄生虫,易传播疾病,并伴有异味,使居住环境变得十分肮脏和凌乱。市面上的宠物粪便清理主要以塑料袋和抓取器为主,虽然达到了一定的清扫目的但是耗时耗力,且后续处理仍相对繁琐,随着科技的发展和人工智能技术的愈发成熟,家庭宠物粪便清理机器人成为一个热点,家庭宠物粪便清理机器人的出现主要有三大原因:一是减少宠物主人对清理宠物粪便的负担;二是可以对宠物粪便进行清扫,包装,和对地面进行消毒除异味的处理;三是满足了人们对美好市容和一个干净城市的向往。家庭宠物粪便清理机器人以其独特的优势,无论是从经济角度考虑还是从创新性考虑都有着不小的吸引力。
3.因此本发明设计出一种家庭型宠物护理机器人具有很大的市场价值与重要意义。
技术实现要素:
4.有鉴于此,本发明的目的是研制出一种家庭宠物粪便清理机器人,其采用机械抓取臂,能够抓取地上的宠物粪便及其他垃圾,并将垃圾装入袋中完成打包,大大降低宠物粪便清洁工作的劳动强度。
5.本发明的家庭宠物粪便清理机器人,包括车体、设置于车体前端的清洁装置和机械臂、通过转盘支撑座支承于车体上的旋转支架和设置于旋转支架前方的粪便收纳盒;所述机械臂外端设有用于抓取粪便或其他垃圾至粪便收纳盒处的抓取装置;所述粪便收纳盒用于放置垃圾袋并可将垃圾袋热熔封口;所述旋转支架沿圆周方向均匀分布有用于将粪便收纳盒处封口后的垃圾袋向车体后部输送的送袋装置;
6.进一步,所述粪便收纳盒包括盒体和两个对置设置于盒体内的热熔封口装置;所述热熔封口装置包括丝杠螺母机构、剪叉式伸缩杆和电热元件;所述丝杠螺母机构包括通过丝杠固定座安装于盒体内壁的丝杠、用于驱动所述丝杠转动的步进电机和与丝杠通过螺纹配合的螺母;所述剪叉式伸缩杆的两个支腿分别铰接于盒体内壁和螺母,剪叉式伸缩杆的另外两个支腿滑动连接于电热元件的背部;
7.进一步,所述清洁装置包括盖板、设置于盖板顶面用于与车体固定连接的连接块、设置于盖板两侧的卡扣和通过卡扣卡接于盖板底面的清洁海绵;
8.进一步,所述机械臂包括基座、后端铰接于基座的大臂、后端铰接于大臂前端的小臂和铰接于小臂前端的铲斗连接架;所述大臂的后端设有用于驱动大臂相对于基座摆动的一号舵机;所述小臂后端设有用于驱动小臂相对于大臂摆动的二号舵机,小臂前端设有用于驱动铲斗连接架相对于小臂摆动的三号舵机;
9.进一步,所述抓取装置包括设置于铲斗连接架前端的铲斗和连接于铲斗连接架与铲斗之间的电动推杆;
10.进一步,所述旋转支架包括两转盘和转盘驱动电机;所述转盘包括中心盘体和沿圆周方向分布于中心盘体外圆上的多个支撑板;两所述转盘之间同轴固定连接有转盘连接轴;所述转盘驱动电机通过带传动机构驱动转盘旋转;
11.进一步,所述送袋装置包括安装杆、导轨、齿条和两个套板装置;所述安装杆固定于旋转支架上两个相对的转盘支撑板之间;所述导轨和齿条相互平行固定设置于安装杆上;所述套板装置包括电机座、伺服电机、套板舵机和套板;所述电机座滑动连接于导轨上;所述伺服电机和套板舵机固定安装于电机座上,且伺服电机转轴上固定安装有与齿条啮合的齿轮,所述套板固定于套板舵机的转轴;
12.进一步,所述车体包括车身和车轮;所述车身包括下层底板、上层底板、固定于上层底板和下层底板之间的前挡板和铝件;所述下层底板的两侧固定安装有用于驱动车轮转动的驱动电机。
13.本发明的有益效果:
14.1.本发明的宠物护理机器人利用车体前端的机械臂和抓取装置实现地面上粪便和垃圾的抓取并放置于粪便收纳盒上的垃圾袋里。
15.2.本发明的粪便收纳盒可将装满的垃圾袋进行热熔封口。
16.3.本发明的旋转支架和送袋装置可将封口后的垃圾袋向后输送并实现储存。
附图说明
17.下面结合附图和实施例对本发明作进一步描述:
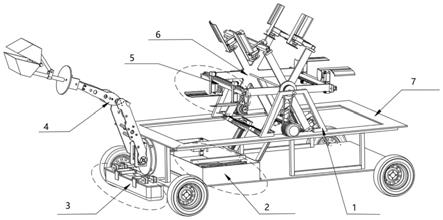
18.图1为本发明的家庭宠物粪便清理机器人的整体结构示意图;
19.图2为本发明的粪便收纳盒的结构示意图;
20.图3为本发明的清洁装置的结构示意图;
21.图4为本发明的机械臂和抓取装置的结构示意图;
22.图5为本发明的送袋装置的结构示意图;
23.图6为本发明的旋转支架的结构示意图;
24.图7为本发明的车体的结构示意图。
具体实施方式
25.如图1所示,本实施例的一种家庭宠物粪便清理机器人,包括车体7、设置于车体7前端的清洁装置3和机械臂4、通过转盘支撑座1支承于车体7上的旋转支架6和设置于旋转支架6前方的粪便收纳盒2;所述机械臂4外端设有用于抓取粪便或其他垃圾至粪便收纳盒2处的抓取装置;所述粪便收纳盒2用于放置垃圾袋并可将垃圾袋热熔封口;所述旋转支架6沿圆周方向均匀分布有用于将粪便收纳盒2处封口后的垃圾袋向车体7后部输送的送袋装置5;
26.如图2所示,所述粪便收纳盒2包括盒体2-1和两个对置设置于盒体2-1内的热熔封口装置;所述热熔封口装置包括丝杠螺母机构、剪叉式伸缩杆2-6和电热元件2-7;所述丝杠螺母机构包括通过丝杠固定座2-4安装于盒体2-1内壁的丝杠2-3、用于驱动所述丝杠2-3转
动的步进电机2-5和与丝杠2-3通过螺纹配合的螺母2-2;所述剪叉式伸缩杆2-6的两个支腿分别铰接于盒体2-1内壁和螺母2-2,剪叉式伸缩杆2-6的另外两个支腿滑动连接于电热元件2-7的背部;当垃圾袋需要打包时,步进电机2-5驱动丝杠2-3旋转时,螺母2-2带动剪叉式伸缩杆2-6的一个支腿端部沿丝杠轴向向下移动,使整个剪叉式伸缩杆2-6沿着盒体2-1长度方向伸长,推动两个电热元件2-7相互靠近,将垃圾袋袋口合拢,最后利用电热元件2-7对垃圾袋口加热进行封口。
27.如图3所示,所述清洁装置3包括盖板3-1、设置于盖板3-1顶面用于与车体7固定连接的连接块3-4、设置于盖板3-1两侧的卡扣3-3和通过卡扣3-3卡接于盖板3-1底面的清洁海绵3-2;连接块3-4设有孔位可利用螺栓等紧固件将其与车体7固定连接;利用卡扣3-3卡接清洁海绵3-2便于对清洁海绵3-2进行更换,清洁海绵3-2朝下设置并与地面接触,其可清洁地上的残留垃圾;清洁海绵3-2浸泡于消毒除臭剂后还可对地面进行消毒除臭处理。
28.如图4所示,所述机械臂4包括基座4-1、后端铰接于基座4-1的大臂4-3、后端铰接于大臂4-3前端的小臂4-6和铰接于小臂4-6前端的铲斗连接架4-8;所述大臂4-3的后端设有用于驱动大臂4-3相对于基座4-1摆动的一号舵机4-2;所述小臂4-6后端设有用于驱动小臂4-6相对于大臂4-3摆动的二号舵机4-5,小臂4-6前端设有用于驱动铲斗连接架4-8相对于小臂4-6摆动的三号舵机4-7;大臂4-3和小臂4-6均包括两侧板和固定于两侧板之间的加固杆件4-4,这种结构的臂体强度高且自重轻;一号舵机4-2、二号舵机4-5和三号舵机4-7共同配合可实现铲斗连接架4-8在空间内移动使铲斗靠近待清理的粪便或垃圾。
29.如图4所示,所述抓取装置包括设置于铲斗4-11连接架前端的铲斗4-11和连接于铲斗4-11连接架与铲斗4-11之间的电动推杆4-9,电动推杆4-9一端通过滑环4-10与铲斗4-11连接架上的一连接柱连接;通过电动推杆4-9伸缩可驱动铲斗4-11打开或合拢。
30.如图6所示,所述旋转支架6包括两转盘和转盘驱动电机6-1;所述转盘包括中心盘体和沿圆周方向分布于中心盘体外圆上的六个支撑板,支撑板外端设有用于安装送袋装置5的连接孔位6-5;两所述转盘之间同轴固定连接有转盘连接轴6-3;所述转盘驱动电机6-1和连接轴6-3上均设有带轮6-4,两带轮6-4之前通过皮带6-2进行出动,从而驱动转盘旋转。
31.如图5所示,所述送袋装置5包括安装杆5-1、导轨5-7、齿条5-6和两个套板装置;所述安装杆5-1通过连接孔5-8固定于旋转支架6上两个相对的转盘支撑板之间;所述导轨5-7和齿条5-6相互平行固定设置于安装杆5-1上;所述套板装置包括电机座5-4、伺服电机5-3、套板舵机5-9和套板5-2;所述电机座5-4滑动连接于导轨5-7上;所述伺服电机5-3和套板舵机5-9固定安装于电机座5-4上,且伺服电机5-3转轴上固定安装有与齿条5-6啮合的齿轮5-5,所述套板5-2固定于套板舵机5-9的转轴;伺服电机5-3通过齿轮5-5齿轮5-5结构可实现电机座5-4整体沿着导轨5-7滑动从而调整两个套板的间距;而伺服电机5-3可带动套板转动,以调整调整的角度;通过伺服电机5-3和舵机5-9相互配合能可靠的携带垃圾袋随旋转支架6转动,将垃圾袋向后输送。
32.如图7所示,所述车体7包括车身和车轮;所述车身包括下层底板、上层底板、固定于上层底板和下层底板之间的前挡板和铝件;所述下层底板的两侧固定安装有用于驱动车轮转动的驱动电机。
33.以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化;凡在本发明的精神和原则之内,所作的任何修改、
等同替换、改进等,均包含在本发明的保护范围之内。