1.本发明涉及处理球的装置领域,具体是一种适用于散落圆球捡拾的小型机器人。
背景技术:
2.在众多的工业机器人中,搬运机器人无疑是应用率最高的机器人之一,不管是在工业制造、仓储物流、烟草、医药、食品、化工等行业领域,还是在邮局、图书馆、港口码头、机场、停车场等场景,都能见到搬运机器人的身影。
3.目前人们会在运动场所中进行各种球类运动,在运动后,运动场所的地面上会散落大量的球类物品,运动场所关闭后,工作人员需要耗费大量时间进行拾取散落的球类物品,但是人工进行拾取,工作量大,且需要长时间弯腰工作,工作强度高;因此,针对上述问题提出一种适用于散落圆球捡拾的小型机器人。
技术实现要素:
4.为了弥补现有技术的不足,解决背景技术中所提出的至少一个技术问题。
5.本发明解决其技术问题所采用的技术方案是:本发明所述的一种适用于散落圆球捡拾的小型机器人,包括底板、驱动组件和抓取筒;所述驱动组件设在底板底部;所述底板顶侧固接有机械臂和收集筐;所述抓取筒安装在机械臂顶部;所述抓取筒内部开设有第一空腔和第二空腔;所述第二空腔设在靠近收集筐的一侧;第二空腔侧壁上固接有一组第一电机;所述第一电机输出端固接有蜗杆;所述第二空腔侧壁上转动连接有第一齿轮;所述第一齿轮和蜗杆互相啮合;所述抓取筒内设有齿条;所述齿条贯穿第一空腔和第二空腔之间的壁体并与其滑动连接;所述第一空腔侧壁上转动连接有转轴;所述转轴上固接有抓取块和第二齿轮;所述齿条的两端分别与第一齿轮和第二齿轮啮合,以此完成后对球类物体的拾取和收集,以此从而可以降低工作人员的工作量,并且方便于工作人员对场地内的球类物品进行清理。
6.优选的,所述驱动组件包括支撑架;一组所述支撑架固接在底板底侧;所述支撑架内固接有第二电机;所述第二电机输出端固接有福来轮;一组所述福来轮分别设在底板的四个边角,以此驱动装置进行移动。
7.优选的,所述第一空腔靠近第二空腔的一侧固接有活塞缸;所述活塞缸内滑动连接有活塞杆;所述活塞杆位于活塞缸外的一端固接有竖板;所述竖板与齿条底侧固接;所述活塞缸的无杆腔固接有出油管;所述出油管的顶端固接在第一顶侧与第二齿轮对应位置处,出油管喷出的润滑油可以对齿轮和转轴进行润滑,从而减少转动时的摩擦,降低摩擦损耗,同时减小转动时的阻力,减少卡死。
8.优选的,所述第一空腔顶侧与出油管对应位置处固接有环形棉绳;所述环形棉绳靠近第二齿轮的一侧固接有细绳;所述细绳内固接有弹性杆;所述弹性杆端部与第一空腔侧壁固接;所述细绳的端部与齿条接触,以此可以对个多个齿条进行润滑。
9.优选的,所述细绳靠近齿条的一端固接有第一磁块;所述齿条靠近抓取块的一侧
固接有第二磁块;所述第一空腔靠近抓取块的一侧固接有阻油环,以此将润滑油甩出,从而提高细绳的润滑面积,进而提高润滑效果。
10.优选的,所述第一空腔底部固接有过滤网罩;所述过滤网罩为锥形结构设计;所述过滤网罩侧面固接有吸油管;所述吸油管与活塞缸的无杆腔连通;所述吸油管端部固接有第一单向阀;所述出油管端部固接有第二单向阀,以此将润滑油重新吸回。
11.优选的,所述过滤网罩上设置有转动轴;所述转动轴贯穿过滤网罩壁体并与其转动连接;所述转动轴端部固接有丝杆;所述转动轴上固接有清扫杆;所述竖板底侧固接有杆体;所述丝杆贯穿杆体并与其通过丝杠螺母副连接,清扫杆旋转时,其表面的刷毛可以对过滤网罩进行清扫,从而对过滤网罩进行疏通。
12.优选的,所述底板上安装有视觉识别模块、舵机、舵机控制器、电机驱动模块、stm32主控板和mpu6050模块;所述视觉识别模块和mpu6050模块与 stm32主控板通过信号连接;所述stm32主控板与舵机控制器和电机驱动模块通过信号连接;所述舵机控制器与舵机通过信号连接;所述电机驱动模块与第二电机通过信号连接;所述第二电机上安装有霍尔编码器;第二电机与霍尔编码器通过信号连接;所述底板侧面固接有tft屏幕。
13.本发明的有益之处在于:
14.1.本发明通过设置底板、第一电机、驱动组件、机械壁、抓取筒、第一齿轮、第二齿轮、蜗杆、齿条和抓取块,在使用时,依靠驱动组件进行驱动装置在运动场所内移动,机械臂驱动抓取筒进行移动,然后通过第一电机驱动抓取块进行抓取球类物品,从而实现对球类物品的拾取,通过该装置替代人工进行拾取,以此可以降低工作人员的工作强度,减少工作量,从而可以便于工作人员对运动场所进行清理。
15.2.本发明通过设置第二电机、支撑架和福来轮,依靠该设置驱动装置进行移动,同时采用两对相互垂直的福来轮设计,每一对分别用来控制经线和纬线方向上的运动,从而简化了机器人的转向过程,使车身不必转向,便可以在场地内任意移动。
附图说明
16.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
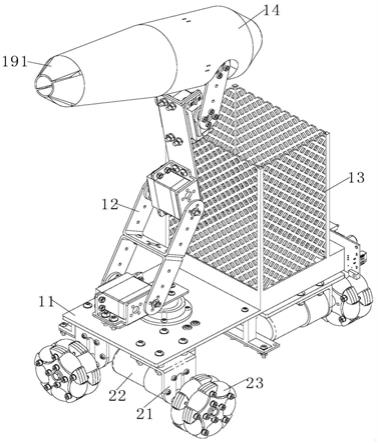
17.图1为本发明中底板的立体图;
18.图2为本发明中底板的俯视图;
19.图3为本发明中抓取筒结构示意图;
20.图4为图3中a处的局部放大图;
21.图5为图3中b处的局部放大图;
22.图6为本发明中清扫杆的结构示意图;
23.图7为本发明的模块连接示意图。
24.图中:11、底板;12、机械臂;13、收集筐;14、抓取筒;141、第一空腔;142、第二空腔;15、第一电机;16、蜗杆;17、第一齿轮;18、齿条;191、抓取块;192、第二齿轮;193、转轴;21、支撑架;22、第二电机;23、福来轮;31、活塞缸;32、活塞杆;33、出油管;34、竖板;41、环形棉
绳; 42、细绳;43、弹性杆;51、第一磁块;52、第二磁块;53、阻油环;61、吸油管;62、过滤网罩;71、杆体;72、丝杆;73、清扫杆。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
26.实施例一
27.请参阅图1-5所示,一种适用于散落圆球捡拾的小型机器人,包括底板 11、驱动组件和抓取筒14;所述驱动组件设在底板11底部;所述底板11顶侧固接有机械臂12和收集筐13;所述抓取筒14安装在机械臂12顶部;所述抓取筒14内部开设有第一空腔141和第二空腔142;所述第二空腔142设在靠近收集筐13的一侧;第二空腔142侧壁上固接有一组第一电机15;所述第一电机15输出端固接有蜗杆16;所述第二空腔142侧壁上转动连接有第一齿轮17;所述第一齿轮17和蜗杆16互相啮合;所述抓取筒14内设有齿条18;所述齿条18贯穿第一空腔141和第二空腔142之间的壁体并与其滑动连接;所述第一空腔141侧壁上转动连接有转轴193;所述转轴193上固接有抓取块 191和第二齿轮192;所述齿条18的两端分别与第一齿轮17和第二齿轮192 啮合;在使用过程中,驱动组件带动机器人进行移动,当机器人移动至抓取物的附近时,机械臂12带动抓取筒14进行运动,然后底端与抓取物接触,之后第一电机15通电进行工作,然后带动蜗杆16进行旋转,第一齿轮17为涡轮,蜗杆16以此带动第一齿轮17转动,第一齿轮17旋转时会带动齿条18 进行前后移动,齿条18的前后移动会带动第二齿轮192进行旋转,从而带动抓取块191进行旋转,从而实现抓取的动作,以此进行抓取球类物品,之后机械臂12带动抓取筒14后仰,第一电机15驱动抓取块191张开,然后抓取物从而抓取筒14内掉落至收集筐13,从而完成后对球类物体的拾取和收集,以此从而可以降低工作人员的工作量,并且方便于工作人员对场地内的球类物品进行清理。
28.所述驱动组件包括支撑架21;一组所述支撑架21固接在底板11底侧;所述支撑架21内固接有第二电机22;所述第二电机22输出端固接有福来轮 23;一组所述福来轮23分别设在底板11的四个边角;在使用过程中,第二电机22为直流减速电机,第二电机22驱动福来轮23进行旋转,以此驱动装置进行移动,采用两对相互垂直的福来轮23设计,每一对分别用来控制经线和纬线方向上的运动,从而简化了机器人的转向过程,使车身不必转向,便可以在场地内任意移动。
29.所述第一空腔141靠近第二空腔142的一侧固接有活塞缸31;所述活塞缸31内滑动连接有活塞杆32;所述活塞杆32位于活塞缸31外的一端固接有竖板34;所述竖板34与齿条18底侧固接;所述活塞缸31的无杆腔固接有出油管33;所述出油管33的顶端固接在第一顶侧与第二齿轮192对应位置处;在长期使用时,第一空腔141内会发生受潮的情况,从而导致内部的第二齿轮192、转轴193和齿条18发生锈蚀,在齿条18进行移动,齿条18会带动竖板34进行挤压活塞杆32,活塞缸31注有润滑油,之后活塞杆32的挤压会将润滑油从出油管33喷出,出油管33喷出的润滑油可以对齿轮和转轴193 进行润滑,从而减少转动时的摩擦,降低摩擦损耗,同时减小转动时的阻力,减少卡死。
30.所述第一空腔141顶侧与出油管33对应位置处固接有环形棉绳41;所述环形棉绳41靠近第二齿轮192的一侧固接有细绳42;所述细绳42内固接有弹性杆43;所述弹性杆43端部与第一空腔141侧壁固接;所述细绳42的端部与齿条18接触;在使用过程中,润滑油会使环形棉绳41和细绳42浸湿,之后润滑油滴落在齿条18上,从而对每个齿条18进行涂抹,齿条18与第二齿轮192接触,以此对齿轮进行润滑,以此可以对个多个齿条18进行润滑,弹性杆43用于进行支撑每根细绳42,使其不易发生弯曲。
31.所述细绳42靠近齿条18的一端固接有第一磁块51;所述齿条18靠近抓取块191的一侧固接有第二磁块52;所述第一空腔141靠近抓取块191的一侧固接有阻油环53;在使用过程中,齿条18向上进行移动时,第一磁块51 和第二磁块52互相进行靠近,然后第一磁块51和第二磁块52相斥,使细绳 42弯曲张开,在齿条18向下进行移动时,第一磁块51和第二磁块52远离,弹性杆43进行复原,然后会使得细绳42抖动,以此将润滑油甩出,从而提高细绳42的润滑面积,进而提高润滑效果。
32.所述第一空腔141底部固接有过滤网罩62;所述过滤网罩62为锥形结构设计;所述过滤网罩62侧面固接有吸油管61;所述吸油管61与活塞缸31的无杆腔连通;所述吸油管61端部固接有第一单向阀;所述出油管33端部固接有第二单向阀;在使用过程中,齿条18向下移动时,活塞缸31内的润滑被挤出,齿条18向上移动时,位于第一空腔141底部的润滑油会被吸入到活塞缸31内,通过过滤网罩62可以对润滑油进行过滤,进而减少润滑油内的杂质,从而降低杂质对润滑效果的影响,过滤网罩62的锥形结构设计,以此可以提高过滤网罩62的可过滤面积,从而使其不易被堵塞,球类物品掉入收集筐13时,此时第一电机15驱动张开的抓取块191进行合拢复位,然后此时活塞缸31将润滑油进行吸回。
33.所述底板11上安装有视觉识别模块、舵机、舵机控制器、电机驱动模块、 stm32主控板和mpu6050模块;所述视觉识别模块和mpu6050模块与stm32主控板通过信号连接;所述stm32主控板与舵机控制器和电机驱动模块通过信号连接;所述舵机控制器与舵机通过信号连接;所述电机驱动模块与第二电机22通过信号连接;所述第二电机22上安装有霍尔编码器;第二电机22与霍尔编码器通过信号连接;所述底板11侧面固接有tft屏幕;
34.在使用时,通过两对相互垂直的福来轮分别实现机器人的不同方向的行驶,通过直流电机及霍尔编码器测速、结合pid算法实现机器人的速度及方向控制,mpu6050模块用于检测机器人姿态信息,以及控制福来轮偏离时进行行驶方向调节,行驶过程中,mpu6050模块及视觉识别模块的摄像头可以实时检测到机器人与周围小球之间距离变化,通过主控发出控制指令,结合pid 算法、调整轮子速度,保证机器人的行驶姿态准确和稳定;
35.视觉识别模块,用于采集图像完成颜色识别判断场地散落小球的位置,在识别时,采用嵌入式图像识别方案,结合opencv算法实现颜色识别,识别精度高、速度快;
36.stm32主控板由主控芯片、主板和主控电路构成,主控芯片采用意法半导体的stm32f103rct6微控制器,具有64个引脚,包含两个高级定时器、四个通用定时器、两个基本定时器,以及多路串口、iic等硬件通信接口,为 mpu6050、tft屏幕、pwm控制板、提供足够的硬件资源,主板电路包含按键、 led、microusb、jtag接口、串口、预留io资源,同时,主板板载两个l298n 电机驱动模块,足以为驱动电机提供强大动力,同时进行控制第二电机22,主板由12v电源供电,电源用于驱动电机,另一部分经过7805、ams1117芯片降压后给主控srm32供电,主控电路采用stm32f103微控制器,主控板集成了两个l298n电机驱动模块,可
同时驱动四个直流减速电机,驱动能力强,满足设计要求;主控板采用两个7805模块将电源电压将至5v,用来给单片机、外围模块供电,主控芯片由一个ams1117芯片完成3.3v供电,供电功率大,满足大功率外围模块的使用要求,可为外围模块提供稳定的电压、电流输出,保障了控制系统运行的稳定性与传感器测量的准确性;主控板引出了jtag、 l298n输入接口、stm32io、usb、usart接口,方便调试与使用。
37.实施例二
38.请参阅图6所示,对比实施例一,作为本发明的另一种实施方式,所述过滤网罩62上设置有转动轴;所述转动轴贯穿过滤网罩62壁体并与其转动连接;所述转动轴端部固接有丝杆72;所述转动轴上固接有清扫杆73;所述竖板34底侧固接有杆体71;所述丝杆72贯穿杆体71并与其通过丝杠螺母副连接;在长期使用时,过滤网罩62会发生堵塞,在竖板34进行移动,竖杆会带动杆体71进行移动,杆体71的会驱动丝杆72发生旋转,然后带动清扫杆73进行旋转,清扫杆73旋转时,其表面的刷毛可以对过滤网罩62进行清扫,从而对过滤网罩62进行疏通。
39.工作原理,在使用时,驱动组件带动机器人进行移动,当机器人移动至抓取物的附近时,机械臂12带动抓取筒14进行运动,然后底端与抓取物接触,之后第一电机15通电进行工作,然后带动蜗杆16进行旋转,第一齿轮 17为涡轮,蜗杆16以此带动第一齿轮17转动,第一齿轮17旋转时会带动齿条18进行前后移动,齿条18的前后移动会带动第二齿轮192进行旋转,从而带动抓取块191进行旋转,从而实现抓取的动作,以此进行抓取球类物品,之后机械臂12带动抓取筒14后仰,第一电机15驱动抓取块191张开,然后抓取物从而抓取筒14内掉落至收集筐13,从而完成后对球类物体的拾取和收集,以此从而可以降低工作人员的工作量,并且方便于工作人员对场地内的球类物品进行清理,第二电机22为直流减速电机,第二电机22驱动福来轮 23进行旋转,以此驱动装置进行移动,采用两对相互垂直的福来轮23设计,每一对分别用来控制经线和纬线方向上的运动,从而简化了机器人的转向过程,使车身不必转向,便可以在场地内任意移动,在长期使用时,第一空腔 141内会发生受潮的情况,从而导致内部的第二齿轮192、转轴193和齿条18 发生锈蚀,在齿条18进行移动,齿条18会带动竖板34进行挤压活塞杆32,活塞缸31注有润滑油,之后活塞杆32的挤压会将润滑油从出油管33喷出,出油管33喷出的润滑油可以对齿轮和转轴193进行润滑,从而减少转动时的摩擦,降低摩擦损耗,同时减小转动时的阻力,减少卡死,润滑油会使环形棉绳41和细绳42浸湿,之后润滑油滴落在齿条18上,从而对每个齿条18 进行涂抹,齿条18与第二齿轮192接触,以此对齿轮进行润滑,以此可以对个多个齿条18进行润滑,弹性杆43用于进行支撑每根细绳42,使其不易发生弯曲,齿条18向上进行移动时,第一磁块51和第二磁块52互相进行靠近,然后第一磁块51和第二磁块52相斥,使细绳42弯曲张开,在齿条18向下进行移动时,第一磁块51和第二磁块52远离,弹性杆43进行复原,然后会使得细绳42抖动,以此将润滑油甩出,从而提高细绳42的润滑面积,进而提高润滑效果,齿条18向下移动时,活塞缸31内的润滑被挤出,齿条18向上移动时,位于第一空腔141底部的润滑油会被吸入到活塞缸31内,通过过滤网罩62可以对润滑油进行过滤,进而减少润滑油内的杂质,从而降低杂质对润滑效果的影响,过滤网罩62的锥形结构设计,以此可以提高过滤网罩62 的可过滤面积,从而使其不易被堵塞,球类物品掉入收集筐13时,此时第一电机15驱动张开的抓取块191进行合拢复位,然后此时活塞缸31将润滑油进行吸回,在长期使用时,过滤网罩62会发生堵塞,在竖
板34进行移动,竖杆会带动杆体71进行移动,杆体71的会驱动丝杆72发生旋转,然后带动清扫杆73进行旋转,清扫杆73旋转时,其表面的刷毛可以对过滤网罩62进行清扫,从而对过滤网罩62进行疏通。
40.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
41.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。