1.本发明涉及智能机器人技术领域,特别是涉及一种用于化工厂的机器人安保系统。
背景技术:
2.国家统计局发布根据第七次人口普查最新人口数据,2020年我国新增人口数量234万,比2019年的467万下降了49.89%,随着人口红利耗尽,越来越多的行业将遭受冲击,严重依赖人力的安保行业更是首当其冲。相关统计显示,目前我国安保市场存在高达112万的人力缺口,化工厂是从事化学工业的工厂,很多化工厂生产的产品或原料对人体都具有较大的危害,特别是发生意外火灾时,化学产品和原料燃烧具有很大的危害性,同时也存在爆炸等风险。然而大部分安保从业人员文化水平和专业素养不高因此很难及时做出正确的反应。
3.综上所述,目前需要一种可以对危险情况进行检测并将信息实时反馈给用户的机器人为化工厂特殊的环境提供安全保障。
技术实现要素:
4.本发明的目的是克服了现有技术的问题,提供了一种用于化工厂的机器人安保系统。
5.为了达到上述目的,本发明采用以下方案:
6.一种用于化工厂的机器人安保系统,包括:
7.机器人本体,机器人本体包括底盘、热感相机、云台摄像头、声光报警器、无线传输模块和传感器模块,机器人本体通过无线传输模块与远程监控端连接;
8.传感器模块,传感器模块与设于底盘上的驱动控制板连接,传感器模块通过驱动控制板实时将信息发送至底盘同时远程监控端实时接收显示相应的数据,当检测数据达到阈值时机器人本体上的声光报警器进行报警警示远程操控端也同步弹窗警示;
9.导航模块,导航模块设于机器人本体上与底盘连接,导航模块包括激光雷达和惯性测量单元,导航模块通过激光雷达和惯性测量单元对可机器人本体进行同步定位与地图构建;
10.远程监控端,远程监控端可显示热感相机和云台摄像头传输的视频信息;
11.控制手柄,控制手柄与远程监控端无线连接,控制手柄可通过远程监控端对机器人本体下发移动指令进行移动控制。
12.进一步的,传感器模块包括:
13.用于检测有害气体的pm2.5传感器和pm10传感器;
14.用于检测火灾时烟雾的烟雾传感器;
15.用于搜寻火源的火焰传感器。机器人搭载着各种传感器通过驱动控制实时将信息发送至底盘,同时远程操控端也实时显示相应的数据,当某一数值达到阈值时,将通过机器
人上的声光报警器进行报警警示,远程操控端也同步弹窗警示。
16.进一步的,传感器模块还包括温度传感器和湿度传感器。
17.进一步的,机器人本体内还设有自主充电模块,当电池电量低于自主充电模块设置阈值时,机器人将通过导航模块自动导航至预设的充电地点进行自主充电。
18.进一步的,驱动板的微控制器为stm32f4。
19.进一步的,温度传感器和湿度传感器为建大仁科温湿度传感器4-20ma高精度室外数显变送器工业用温湿度计。
20.进一步的,烟雾传感器为建大仁科消防火灾报警器485型烟雾传感器,烟雾传感器的供电电源为10~30v dc,静态功耗为0.12w,报警功耗为0.7w,通信协议为modbus-rtu,烟雾灵敏度为1.06
±
26%f t。
21.进一步的,火焰传感器为红外火焰传感器,火焰传感器的热源探测波长为700纳米~1000纳米。火焰传感器是机器人专门用来搜寻火源的传感器。火焰传感器利用红外线对火焰非常敏感的特点,使用特制的红外线接收管来检测火焰,然后把火焰的亮度转化为高低变化的电平信号,输入到底盘的中央处理器中,中央处理器根据信号的变化做出相应的程序处理。
22.进一步的,pm2.5传感器和pm10传感器均为建大仁科pm2.5传感器和pm10传感器。
23.与现有的技术相比,本发明具有如下优点:该用于化工厂的机器人安保系统包括多种传感器,适用于室内及室外特别针对于化工厂面积大,地形环境复杂的情况下进行自主巡检及环境监测。融合激光雷达+slam导航、热感、移动机器人鲁棒性协调那个集成等关键技术,实现机器人智能巡逻、可对周围环境进行实时感知,精确检测相关环境信息,上传至数据后台,大大解放人力成本,提高工作效率。因此通过该机器人安保系统可实现环境感知、任务理解与决策、运动规划、精确定位、预设路径的跟踪、自主返航、人员车辆跟随、远程遥控等功能,轻松实现对化工厂的巡检安保部署。
附图说明
24.下面结合附图和具体实施方式对本技术作进一步详细的说明。
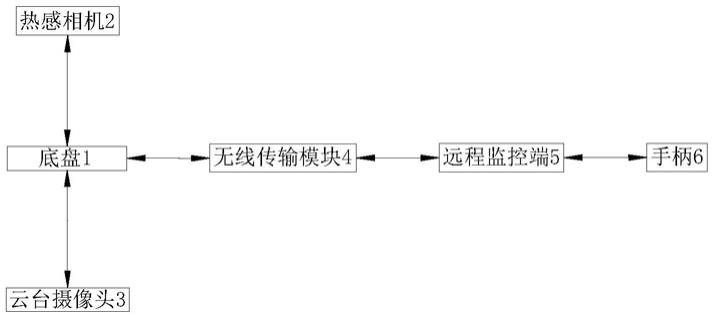
25.图1是本发明的一种用于化工厂的机器人安保系统部分模块连接示意图。
26.图2是本发明的一种用于化工厂的机器人安保系统传感器模块的连接示意图。
27.图3是本发明的一种用于化工厂的机器人安保系统驱动控制板的部分电路逻辑图。
28.图4是本发明的一种用于化工厂的机器人安保系统驱动控制板的部分电路逻辑图。
29.图5是本发明的一种用于化工厂的机器人安保系统驱动控制板的部分电路逻辑图。
具体实施方式
30.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
31.如图1所示,一种用于化工厂的机器人安保系统,包括:
32.机器人本体,机器人本体包括底盘1、热感相机2、云台摄像头3、声光报警器、无线传输模块4和传感器模块,机器人本体通过无线传输模块4与远程监控端5连接;
33.传感器模块,传感器模块与设于底盘1上的驱动控制板连接,传感器模块通过驱动控制板实时将信息发送至底盘1同时远程监控端5实时接收显示相应的数据,当检测数据达到阈值时机器人本体上的声光报警器进行报警警示远程操控端也同步弹窗警示;
34.导航模块,导航模块设于机器人本体上与底盘1连接,导航模块包括激光雷达和惯性测量单元,导航模块通过激光雷达和惯性测量单元对可机器人本体进行同步定位与地图构建;
35.远程监控端5,远程监控端5可显示热感相机2和云台摄像头3传输的视频信息;
36.控制手柄6,如图1所示,控制手柄6与远程监控端5无线连接,控制手柄6可通过远程监控端5对机器人本体下发移动指令进行移动控制。
37.如图2所示,优选的,传感器模块包括:
38.用于检测有害气体的pm2.5传感器和pm10传感器;
39.用于检测火灾时烟雾的烟雾传感器;
40.用于搜寻火源的火焰传感器。机器人搭载着各种传感器通过驱动控制实时将信息发送至底盘1,同时远程操控端也实时显示相应的数据,当某一数值达到阈值时,将通过机器人上的声光报警器进行报警警示,远程操控端也同步弹窗警示。
41.优选的,如图2所示,传感器模块还包括温度传感器和湿度传感器。
42.优选的,机器人本体内还设有自主充电模块,当电池电量低于自主充电模块设置阈值时,机器人将通过导航模块自动导航至预设的充电地点进行自主充电。
43.优选的,如图3所示,驱动板的微控制器为stm32f4。
44.优选的,温度传感器和湿度传感器为建大仁科温湿度传感器4-20ma高精度室外数显变送器工业用温湿度计。
45.优选的,烟雾传感器为建大仁科消防火灾报警器485型烟雾传感器,烟雾传感器的供电电源为10~30v dc,静态功耗为0.12w,报警功耗为0.7w,通信协议为modbus-rtu,烟雾灵敏度为1.06
±
26%f t。
46.优选的,火焰传感器为红外火焰传感器,火焰传感器的热源探测波长为700纳米~1000纳米。火焰传感器是机器人专门用来搜寻火源的传感器。火焰传感器利用红外线对火焰非常敏感的特点,使用特制的红外线接收管来检测火焰,然后把火焰的亮度转化为高低变化的电平信号,输入到底盘1的中央处理器中,中央处理器根据信号的变化做出相应的程序处理。
47.优选的,pm2.5传感器和pm10传感器均为建大仁科pm2.5传感器和pm10传感器。
48.与现有的技术相比,本发明具有如下优点:该用于化工厂的机器人安保系统包括多种传感器,适用于室内及室外特别针对于化工厂面积大,地形环境复杂的情况下进行自主巡检及环境监测。融合激光雷达+slam导航、热感、移动机器人鲁棒性协调那个集成等关键技术,实现机器人智能巡逻、可对周围环境进行实时感知,精确检测相关环境信息,上传至数据后台,大大解放人力成本,提高工作效率。因此通过该机器人安保系统可实现环境感知、任务理解与决策、运动规划、精确定位、预设路径的跟踪、自主返航、人员车辆跟随、远程遥控等功能,轻松实现对化工厂的巡检安保部署。
49.以上所述仅是本技术的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本技术的保护范围。