1.本发明涉及货物运输技术领域,尤其涉及一种货物提升用带防摆动结构的智能机器人。
背景技术:
2.机器人是自动控制机器(robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等),狭义上对机器人的定义还有很多分类法及争议,有些电脑程序甚至也被称为机器人,在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。
3.电子商务和网络购物的快速发展,既给物流仓储行业带来了前所未有的发展机遇,也给快递服务提出了严峻的挑战。因此,发明并制造出了一批用于分拣、运输货物的机器人,这大大地提高了物流仓储的效率,但是在对货物进行提升搬运的过程中,货物会发生摆动,会对提升货物的机械臂以及机械爪进行撞击,损伤机械臂以及机械爪,降低机器人的使用寿命。
4.因此,有必要提供一种新的货物提升用带防摆动结构的智能机器人解决上述技术问题。
技术实现要素:
5.为解决上述技术问题,本发明提供一种使用寿命较长的货物提升用带防摆动结构的智能机器人。
6.本发明提供的货物提升用带防摆动结构的智能机器人包括:。
7.底座,所述底座上架设有机械臂;
8.其特征在于,所述智能机器人还包括:
9.防摆动机构,所述防摆动机构设置在机械臂上,所述防摆动机构包括棱杆、滑套板、第一压簧、滑杆和第二压簧,所述棱杆设置在安装盒内,且棱杆上套接有滑动连接的滑套板,且棱杆的两端均串接有第一压簧,所述第一压簧的一端固定安装在安装盒的内侧壁上,且第一压簧的另一端固定安装在滑套板上,所述棱杆的两端均贯穿有滑动连接的滑杆,所述滑杆的两端均固定安装在安装盒的内侧壁上,且滑杆的两端均串接有第二压簧,所述第二压簧的一端固定安装在安装盒的内侧壁上,且第二压簧的另一端固定安装在棱杆上;
10.在货物提升搬运的过程中,会发生摆动,使得滑套板沿着棱杆滑动,压缩第一压簧,而棱杆沿着滑杆滑动,压缩第二压簧,使得第一压簧第二压簧内产生一个作用力来阻止滑套板和棱杆滑动,将滑套板和棱杆的滑动幅度降低,且抵消了货物摆动对机械臂的压力,也就避免了机械臂受到损伤,增加使用寿命。
11.优选的,所述滑套板穿过安装盒底部开设有通孔并延伸至安装盒外。
12.优选的,所述底座上安装有用于驱动机械臂转动的转动机构,所述转动机构包括转动电机、输出轴、安装槽和主动齿轮,所述转动电机固定安装在底座上,且转动电机的输
出轴插设进底座上开设的安装槽中,所述输出轴与安装槽的内底壁转动连接,且输出轴上套接有固定连接的主动齿轮。
13.优选的,所述转动机构还包括转动轴和从动齿轮,所述转动轴的一端与安装槽的内底壁转动连接,且转动轴的另一端贯穿底座并延伸至底座外,且转动轴上套接有固定连接的从动齿轮,所述从动齿轮与主动齿轮啮合连接,在机器人检测到货物所在的地点或者需要将货物运到另一侧时,驱动转动电机,使得输出轴带动主动齿轮转动,驱动从动齿轮转动,从而使得转动轴开始转动,带动转盘转动,也就使得机械臂发生转动。
14.优选的,所述机械臂上安装有夹物机构,所述夹物机构包括驱动组件、活动爪和安装板,所述驱动组件架设在机械臂上,且驱动组件上安装有活动爪,所述活动爪通过安装板与滑套板连接,所述安装板固定安装在滑套板的延伸端上。
15.优选的,所述驱动组件包括电推杆、l形板和转动杆,所述电推杆固定安装在安装盒的外侧壁上,且电推杆的输出端上固定安装有l形板,所述l形板上安装有两根转动连接的转动杆,且两根转动杆与l形板的连接端同轴心,提升货物时,驱动机械臂,将活动爪置于货物的上方,启动电推杆向下推动l形板,使得转动杆向下移动的同时发生转动,促使活动爪张开,这是驱动机械臂将活动爪向下压,将货物包覆在活动爪中,启动启动电推杆向上拉动l形板,使得转动杆向上移动的同时发生转动,促使活动爪靠近货物,将货物夹住,驱动机械臂,将货物提起。
16.优选的,所述活动爪包括控制杆和夹板,两根所述控制杆中部分别安装在一根所述转动杆上并与转动杆转动连接,且每一个根所述控制杆的一端安装在安装板上并与安装板转动连接,且每一个根所述控制杆的另一端安装有转动连接的夹板,转动杆向下移动并发生转动时,将控制杆撑开,使得夹板能位于货物的两端将货物夹住。
17.优选的,所述控制杆上固定安装有弹簧,且弹簧的另一端固定安装在夹板上,弹簧能避免夹板在夹持货物的过程中向两侧张开,使得货物掉落,还能在货物发生摆动的时候,产生弹力来削弱货物摆动的幅度,避免其对夹物机构造成损伤,增加了使用寿命。
18.优选的,所述转动轴的延伸端上固定安装有转盘,且转盘上固定安装有机械臂。
19.优选的,所述安装盒的顶部固定安装有t字杆,且t字杆插设在机械臂中并与机械臂转动连接,在活动爪不能在货物这一侧夹持时,驱动机械臂驱动t字杆转动,改变活动爪夹持的位置,使得活动爪的使用更为灵活,增加了活动爪的使用范围。
20.与相关技术相比较,本发明提供的货物提升用带防摆动结构的智能机器人具有如下有益效果:
21.1、本发明提供一种货物提升用带防摆动结构的智能机器人,在在货物提升搬运的过程中,会发生摆动,使得滑套板沿着棱杆滑动,压缩第一压簧,而棱杆沿着滑杆滑动,压缩第二压簧,使得第一压簧第二压簧内产生一个作用力来阻止滑套板和棱杆滑动,将滑套板和棱杆的滑动幅度降低,且抵消了货物摆动对机械臂的压力,也就避免了机械臂受到损伤,增加使用寿命;
22.2、本发明中设置的弹簧能避免夹板在夹持货物的过程中向两侧张开,使得货物掉落,还能在货物发生摆动的时候,产生弹力来削弱货物摆动的幅度,避免其对夹物机构造成损伤,增加了使用寿命
23.3、本发明中设置的活动爪不能在货物这一侧夹持时,驱动机械臂驱动t字杆转动,
改变活动爪夹持的位置,使得活动爪的使用更为灵活,增加了活动爪的使用范围。
附图说明
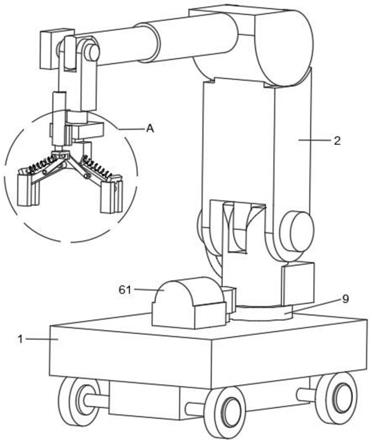
24.图1为本发明提供的货物提升用带防摆动结构的智能机器人的一种较佳实施例的结构示意图;
25.图2为图1所示的后视的结构示意图;
26.图3为图1所示的防摆动机构的安装结构示意图;
27.图4为图1所示的防摆动机构的具体结构示意图;
28.图5为图1所示的转动机构的结构示意图;
29.图6为图1所示a处的放大结构示意图。
30.图中标号:1、底座;2、机械臂;3、防摆动机构;31、棱杆;32、滑套板;33、第一压簧;34、滑杆;35、第二压簧;4、安装盒;5、通孔;6、转动机构;61、转动电机;62、输出轴;63、安装槽;64、主动齿轮;65、转动轴;66、从动齿轮;7、夹物机构;71、驱动组件;711、电推杆;712、l形板;713、转动杆;72、活动爪;721、控制杆;722、夹板;73、安装板;8、弹簧;9、转盘;9a、t字杆。
具体实施方式
31.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
32.以下结合具体实施例对本发明的具体实现进行详细描述。
33.请参阅图1至图6,本发明实施例提供的一种货物提升用带防摆动结构的智能机器人,货物提升用带防摆动结构的智能机器人包括:
34.底座1,底座1上架设有机械臂2;
35.其特征在于,智能机器人还包括:
36.防摆动机构3,防摆动机构3设置在机械臂2上,防摆动机构3包括棱杆31、滑套板32、第一压簧33、滑杆34和第二压簧35,棱杆31设置在安装盒4内,且棱杆31上套接有滑动连接的滑套板32,且棱杆31的两端均串接有第一压簧33,第一压簧33的一端固定安装在安装盒4的内侧壁上,且第一压簧33的另一端固定安装在滑套板32上,棱杆31的两端均贯穿有滑动连接的滑杆34,滑杆34的两端均固定安装在安装盒4的内侧壁上,且滑杆34的两端均串接有第二压簧35,第二压簧35的一端固定安装在安装盒4的内侧壁上,且第二压簧35的另一端固定安装在棱杆31上。
37.需要说明的是:在货物提升搬运的过程中,会发生摆动,使得滑套板32沿着棱杆31滑动,压缩第一压簧33,而棱杆31沿着滑杆34滑动,压缩第二压簧35,使得第一压簧33第二压簧35内产生一个作用力来阻止滑套板32和棱杆31滑动,将滑套板32和棱杆31的滑动幅度降低,且抵消了货物摆动对机械臂2的压力,也就避免了机械臂2受到损伤,增加使用寿命。
38.在本发明的实施例中,请参阅图1、图3和图6,滑套板32穿过安装盒4底部开设有通孔5并延伸至安装盒4外,机械臂2上安装有夹物机构7,夹物机构7包括驱动组件71、活动爪72和安装板73,驱动组件71架设在机械臂2上,且驱动组件71上安装有活动爪72,活动爪72
通过安装板73与滑套板32连接,安装板73固定安装在滑套板32的延伸端上,驱动组件71包括电推杆711、l形板712和转动杆713,电推杆711固定安装在安装盒4的外侧壁上,且电推杆711的输出端上固定安装有l形板712,l形板712上安装有两根转动连接的转动杆713,且两根转动杆713与l形板712的连接端同轴心;
39.需要说明的是:提升货物时,驱动机械臂2,将活动爪72置于货物的上方,启动电推杆711向下推动l形板712,使得转动杆713向下移动的同时发生转动,促使活动爪72张开,这是驱动机械臂2将活动爪72向下压,将货物包覆在活动爪72中,启动启动电推杆711向上拉动l形板712,使得转动杆713向上移动的同时发生转动,促使活动爪72靠近货物,将货物夹住,驱动机械臂2,将货物提起。
40.在本发明的实施例中,请参阅图1和图6,活动爪72包括控制杆721和夹板722,两根控制杆721中部分别安装在一根转动杆713上并与转动杆713转动连接,且每一个根控制杆721的一端安装在安装板73上并与安装板73转动连接,且每一个根控制杆721的另一端安装有转动连接的夹板722;
41.需要说明的是:转动杆713向下移动并发生转动时,将控制杆721撑开,使得夹板722能位于货物的两端将货物夹住;
42.而在本实施例中:控制杆721上固定安装有弹簧8,且弹簧8的另一端固定安装在夹板722上,弹簧8能避免夹板722在夹持货物的过程中向两侧张开,使得货物掉落,还能在货物发生摆动的时候,产生弹力来削弱货物摆动的幅度,避免其对夹物机构7造成损伤,增加了使用寿命。
43.在本发明的实施例中,请参阅图1和图5,底座1上安装有用于驱动机械臂2转动的转动机构6,转动机构6包括转动电机61、输出轴62、安装槽63和主动齿轮64,转动电机61固定安装在底座1上,且转动电机61的输出轴62插设进底座1上开设的安装槽63中,输出轴62与安装槽63的内底壁转动连接,且输出轴62上套接有固定连接的主动齿轮64,转动机构6还包括转动轴65和从动齿轮66,转动轴65的一端与安装槽63的内底壁转动连接,且转动轴65的另一端贯穿底座1并延伸至底座1外,且转动轴65上套接有固定连接的从动齿轮66,从动齿轮66与主动齿轮64啮合连接,转动轴65的延伸端上固定安装有转盘9,且转盘9上固定安装有机械臂2;
44.需要说明的是:在机器人检测到货物所在的地点或者需要将货物运到另一侧时,驱动转动电机61,使得输出轴62带动主动齿轮64转动,驱动从动齿轮66转动,从而使得转动轴65开始转动,带动转盘9转动,也就使得机械臂2发生转动。
45.在本发明的实施例中,请参阅图1和图3,安装盒4的顶部固定安装有t字杆9a,且t字杆9a插设在机械臂2中并与机械臂2转动连,在活动爪72不能在货物这一侧夹持时,驱动机械臂2驱动t字杆9a转动,改变活动爪72夹持的位置,使得活动爪72的使用更为灵活,增加了活动爪72的使用范围。
46.本发明提供的货物提升用带防摆动结构的智能机器人的工作原理如下:
47.提升货物时,驱动机械臂2,将活动爪72置于货物的上方,启动电推杆711向下推动l形板712,使得转动杆713向下移动的同时发生转动,促使活动爪72张开,这是驱动机械臂2将活动爪72向下压,将货物包覆在活动爪72中,启动启动电推杆711向上拉动l形板712,使得转动杆713向上移动的同时发生转动,促使活动爪72靠近货物,将货物夹住,驱动机械臂
2,将货物提起
48.在货物提升搬运的过程中,会发生摆动,使得滑套板32沿着棱杆31滑动,压缩第一压簧33,而棱杆31沿着滑杆34滑动,压缩第二压簧35,使得第一压簧33第二压簧35内产生一个作用力来阻止滑套板32和棱杆31滑动,将滑套板32和棱杆31的滑动幅度降低,且抵消了货物摆动对机械臂2的压力,也就避免了机械臂2受到损伤,增加使用寿命;
49.在机器人检测到货物所在的地点或者需要将货物运到另一侧时,驱动转动电机61,使得输出轴62带动主动齿轮64转动,驱动从动齿轮66转动,从而使得转动轴65开始转动,带动转盘9转动,也就使得机械臂2发生转动。
50.本发明中涉及的电路以及控制均为现有技术,在此不进行过多赘述。
51.以上仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本发明的专利保护范围内。