1.本发明属于机器人技术领域,具体的说是一种语音识别机房巡检机器人。
背景技术:
2.机房普遍指的是电信、网通、移动、双线、电力以及政府或者企业等,存放服务器的,为用户以及员工提供it服务的地方,小的几十平米,一般放置二三十个机柜,大的上万平米放置上千个机柜,甚至更多,为了保证业务正常运作,需要对机房内的物理环境状况、设备状况进行监测,例如机房内的温度、设备的信号状态灯、设备的运行状态灯等。
3.公开号为cn111123981a的一项中国专利公开了机房巡检机器人,包括机器人主体、螺旋桨、支撑杆、顶部防护板、防护圈、弹片、控制部、距离传感器、连接杆、行走轮、转轴,机器人主体为俯视为圆形结构的无人机,机器人主体顶部两侧分别设有螺旋桨,机器人主体顶部设有支撑杆,支撑杆顶部设有顶部防护板,机器人主体外周设有防护圈,防护圈通过弹片实现与机器人主体的连接,机器人主体顶部外周设有距离传感器,机器人主体内部设有控制部,距离传感器同与控制部通过线缆实现电连接,机器人主体底部相对于中线对称设有连接杆,连接杆底端设有行走轮。本发明的优点在于:改变了传统巡检机器人仅能在地面穿梭行走进行巡检的巡检方式,使其移动范围不受地面障碍物的限制,具有一定的灵活性。
4.但上述的巡检机器人侧部设置的防护机构弹性不足,使得飞行中的巡检机器人在撞到设备后容易发生坠毁的风险,从而影响机器人工作的顺利进行。
5.因此,本发明提供一种语音识别机房巡检机器人。
技术实现要素:
6.为了弥补现有技术的不足,解决背景技术中所提出的至少一个技术问题。
7.本发明解决其技术问题所采用的技术方案是:本发明所述的一种语音识别机房巡检机器人,包括本体;所述本体上设有螺旋桨与检测仪,且所述本体上设有语音播放器与语音识别系统,所述语音播放器与中央处理器相连,所述语音识别系统与设在本体内部的控制器相连,所述本体侧壁处设有一圈密封式的防护囊,所述防护囊的侧壁形状设置成波浪形;现有的巡检机器人侧部设置的防护机构弹性不足,使得飞行中的巡检机器人在撞到设备后容易发生坠毁的风险,从而影响机器人工作的顺利进行;而本发明中的巡检机器人通过在侧部设置一圈防护囊,当机器人靠近设备时,防护囊能够预先与设备进行撞击贴合,由于防护囊内部为流动的气体,且其侧壁为能够自由伸缩的波浪形,使得防护囊能够保持足够的弹性对机器人的撞击进行缓冲,减少本体坠毁的风险,同时防护囊的一侧在压缩后能够发生反弹,使得机器人能够向远离设备的一侧运动,从而使其有效的远离障碍物,减少机器人与障碍物的反复撞击,同时工作人员能够在办公室通过发布语音指令的形式,使得指令通过中央处理器传递至本体上的语音播放器处进行语音播放,随后本体上的语音识别系统在识别指令后,通过控制器控制机器人的检测状态或运行轨迹,使得机房在巡检时更加
方便快捷。
8.优选的,所述本体外部套设有球形的防护圈,所述防护圈由两半球形壳组成,且所述防护圈由纵横交错且弹性材质的连杆连接而成,且相邻的连杆之间组成网口,所述本体底端通过支撑板与其中一半球形壳的内壁相固连;设置的防护圈能够对机器人进行整体上的防护,进一步减少外界的设备与机器人发生碰撞的风险,且由于防护圈上设置有网口,不影响螺旋桨工作时防护圈内外气体的流动,同时当机器人与障碍物发生撞击并坠落时,此时弹性的防护圈能够对本体进行缓冲与防护,减少机器人的损坏。
9.优选的,所述本体的中部底端所对应的防护圈内壁上连接有配重块;当机器人在遇到障碍物掉落在地后,此时球形状的防护圈能够在配重块的作用下进行转动,使得配重块始终处于防护圈竖直方向上的底端,从而使得防护圈内部的本体能够有效的恢复至飞行状态,并能在螺旋桨的作用下再次起飞并工作。
10.优选的,所述防护圈与配重块相对应的外壁上设有安装板,所述安装板外壁上连接有压囊,所述网口两端的连杆上对称连接有伸缩囊,且与伸缩囊相连的连杆内部分别开设有连通压囊与伸缩囊的气道,所述伸缩囊的自由端与连杆之间连接有弹性体,且对称两伸缩囊相互靠近的端部分别连接有磁性块,所述磁性块靠近时能够相互吸引;当机器人处于非工作状态时,此时防护圈在配重块的作用下对压囊进行挤压,使得压囊中的气体通过气道分别流入各个网口的伸缩囊中,并使其膨胀,同时膨胀后的伸缩囊能够带动磁性块相互靠近,并通过磁性块的相互吸引促进伸缩囊端部的接触贴合,从而使得对称两伸缩囊能够将网口进行封堵,减少外界的灰尘潮气对机器人所造成的污染损坏,当机器人工作时且螺旋桨转动时,一部分气流在对称两伸缩囊之间的间隙中流动,随着机器人与防护圈的逐渐上升,压囊受到的外力也逐渐消失,此时伸缩囊在弹性体的作用下收缩复位,使得对称两伸缩囊之间能够重新打开,从而不影响螺旋桨工作时防护圈内外气体的流动。
11.优选的,所述伸缩囊的自由端设有弧形的弹性片,且所述伸缩囊的自由端外边缘与弹性片的端部相连,所述弹性片的中部向靠近伸缩囊的一侧弯曲,所述网口中部所对应的连杆侧壁上对称开设有两组弧形状的凹槽;伸缩囊膨胀时能够带动弹性片同步运动,直至弹性片的两端运动至凹槽中,此时弹性片在自身弹力与相互吸引的磁性块的压力下能够有效的伸长,并通过其端部对伸缩囊的侧壁起到拉直绷紧的效果,使得伸缩囊侧壁更紧密的贴合在连杆侧壁上,从而能够对网口进行更有效的封堵,进一步减少外界的灰尘潮气对机器人造成的损坏。
12.优选的,所述伸缩囊远离防护圈中心点的一面设有集尘层,所述集尘层的两端分别与伸缩囊的两端相连,所述集尘层由海绵材料制成;伸缩囊伸长时能够带动集尘层同步伸长,使得海绵材质的集尘层孔隙张开,此时灰尘能够落在覆盖在伸缩囊表面的集尘层孔隙中,当伸缩囊收缩复位时,此时集尘层能够同步收缩并使其表面的孔隙收缩,从而能够将灰尘杂质保存在内部,达到集尘的效果,减少伸缩囊在张开时,其表面堆积的灰尘杂质从网口掉落内部的情况,且集尘层在反复伸缩的过程中,能够促进内部的灰尘杂质向集尘层内部流动,提高了集尘层的集尘效果。
13.优选的,位于本体底端的半球形壳上的伸缩囊表面设置有若干贯通腔;螺旋桨在工作时,当本体向上飞行的过程中,防护圈处的气流从其顶部向其底部持续流动,此时流动的气流能够从底部伸缩囊上的贯通腔喷出,随后喷出的气体作用在其表面的集尘层上,能
够将集尘层表面堆积的灰尘杂质吹落,从而提高了防护圈底部集尘层的清洁度。
14.优选的,所述本体顶部的集尘层外侧面所对应的连杆侧壁上连接有挡板,所述伸缩囊的外边缘处设置有凸边,所述挡板与凸边能够对收缩状态下的集尘层外壁与侧壁进行遮挡;当位于防护圈顶部的伸缩囊带动集尘层收缩时,此时该伸缩囊与挡板和凸边能够对集尘层进行包裹遮挡,减少螺旋桨带动外界的气流从该网口流过时,将集尘层中的灰尘杂质带入防护圈内部的情况,进一步减少集尘层中的灰尘杂质对机器人造成的污染。
15.优选的,所述伸缩囊的自由端内侧连接有拉绳,且各个伸缩囊上的拉绳另一端相互连接;当需要对集尘层内部与伸缩囊之间收集的灰尘杂质进行清理时,此时通过拉动拉绳连接的节点,使得拉绳能够同步带动伸缩囊的自由端向防护圈内部翻转,并将伸缩囊的自由端与集尘层的自由端相分离,从而使得伸缩囊中收集的灰尘杂质能够方便快捷的清理。
16.优选的,所述集尘层的自由端处设有吸附块,所述吸附块能够与一侧伸缩囊内部的磁性块相吸引,所述集尘层与伸缩囊的自由端之间所对应的连杆上连接有限位件;集尘层能够通过吸附块与伸缩囊内部磁性块的吸引,将其自由端与伸缩囊的自由端相连接,当通过拉绳拉动伸缩囊的自由端时,由于限位件的作用,使得伸缩囊的自由端在翻转至一定角度后,能够与集尘层的自由端相脱离,不需逐个将集尘层与伸缩囊端部拉开,从而使得伸缩囊与吸尘层之间的灰尘杂质在清理时更加便捷。
17.本发明的有益效果如下:
18.1.本发明通过在机器人侧部设置一圈防护囊,当机器人靠近设备时,防护囊能够预先与设备进行撞击贴合,由于防护囊内部为流动的气体,且其侧壁为能够自由伸缩的波浪形,使得防护囊能够保持足够的弹性对机器人的撞击进行缓冲,减少本体坠毁的风险,同时防护囊的一侧在压缩后能够发生反弹,使得机器人能够向远离设备的一侧运动,从而使其有效的远离障碍物,减少机器人与障碍物的反复撞击。
19.2.本发明设置的防护圈能够对机器人进行整体上的防护,进一步减少外界的设备与机器人发生碰撞的风险,且由于防护圈上设置有网口,不影响螺旋桨工作时防护圈内外气体的流动,同时当机器人与障碍物发生撞击并坠落时,此时弹性的防护圈能够对本体进行缓冲与防护,减少机器人的损坏。
附图说明
20.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
21.图1是本发明的立体示意图;
22.图2是本发明的结构示意图;
23.图3是本发明中相邻连杆组成的网口处的结构示意图;
24.图4是本发明中伸缩囊处的结构示意图;
25.图5是本实施例二中伸缩囊处的结构示意图;
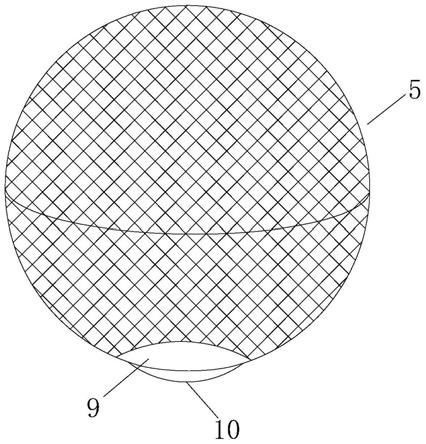
26.图中:本体1、螺旋桨2、检测仪3、防护囊4、防护圈5、连杆6、支撑板7、配重块8、安装
板9、压囊10、伸缩囊11、气道12、弹性体13、磁性块14、弹性片15、凹槽16、集尘层17、贯通腔18、挡板19、凸边20、拉绳21、吸附块22、限位件23。
具体实施方式
27.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
28.实施例一:
29.请参阅图1-图3所示,本发明实施例所述的一种语音识别机房巡检机器人,包括本体1;所述本体1上设有螺旋桨2与检测仪3,且所述本体1上设有语音播放器与语音识别系统,所述语音播放器与中央处理器相连,所述语音识别系统与设在本体1内部的控制器相连,所述本体1侧壁处设有一圈密封式的防护囊4,所述防护囊4的侧壁形状设置成波浪形;现有的巡检机器人侧部设置的防护机构弹性不足,使得飞行中的巡检机器人在撞到设备后容易发生坠毁的风险,从而影响机器人工作的顺利进行;而本发明中的巡检机器人通过在侧部设置一圈防护囊4,当机器人靠近设备时,防护囊4能够预先与设备进行撞击贴合,由于防护囊4内部为流动的气体,且其侧壁为能够自由伸缩的波浪形,使得防护囊4能够保持足够的弹性对机器人的撞击进行缓冲,减少本体1坠毁的风险,同时防护囊4的一侧在压缩后能够发生反弹,使得机器人能够向远离设备的一侧运动,从而使其有效的远离障碍物,减少机器人与障碍物的反复撞击,同时工作人员能够在办公室通过发布语音指令的形式,使得指令通过中央处理器传递至本体1上的语音播放器处进行语音播放,随后本体1上的语音识别系统在识别指令后,通过控制器控制机器人的检测状态或运行轨迹,使得机房在巡检时更加方便快捷。
30.所述本体1外部套设有球形的防护圈5,所述防护圈5由两半球形壳组成,且所述防护圈5由纵横交错且弹性材质的连杆6连接而成,且相邻的连杆6之间组成网口,所述本体1底端通过支撑板7与其中一半球形壳的内壁相固连;设置的防护圈5能够对机器人进行整体上的防护,进一步减少外界的设备与机器人发生碰撞的风险,且由于防护圈5上设置有网口,不影响螺旋桨2工作时防护圈5内外气体的流动,同时当机器人与障碍物发生撞击并坠落时,此时弹性的防护圈5能够对本体1进行缓冲与防护,减少机器人的损坏。
31.所述本体1的中部底端所对应的防护圈5内壁上连接有配重块8;当机器人在遇到障碍物掉落在地后,此时球形状的防护圈5能够在配重块8的作用下进行转动,使得配重块8始终处于防护圈5竖直方向上的底端,从而使得防护圈5内部的本体1能够有效的恢复至飞行状态,并能在螺旋桨2的作用下再次起飞并工作。
32.所述防护圈5与配重块8相对应的外壁上设有安装板9,所述安装板9外壁上连接有压囊10,所述网口两端的连杆6上对称连接有伸缩囊11,且与伸缩囊11相连的连杆6内部分别开设有连通压囊10与伸缩囊11的气道12,所述伸缩囊11的自由端与连杆6之间连接有弹性体13,且对称两伸缩囊11相互靠近的端部分别连接有磁性块14,所述磁性块14靠近时能够相互吸引;当机器人处于非工作状态时,此时防护圈5在配重块8的作用下对压囊10进行挤压,使得压囊10中的气体通过气道12分别流入各个网口的伸缩囊11中,并使其膨胀,同时
膨胀后的伸缩囊11能够带动磁性块14相互靠近,并通过磁性块14的相互吸引促进伸缩囊11端部的接触贴合,从而使得对称两伸缩囊11能够将网口进行封堵,减少外界的灰尘潮气对机器人所造成的污染损坏,当机器人工作时且螺旋桨2转动时,一部分气流在对称两伸缩囊11之间的间隙中流动,随着机器人与防护圈5的逐渐上升,压囊10受到的外力也逐渐消失,此时伸缩囊11在弹性体13的作用下收缩复位,使得对称两伸缩囊11之间能够重新打开,从而不影响螺旋桨2工作时防护圈5内外气体的流动。
33.所述伸缩囊11的自由端设有弧形的弹性片15,且所述伸缩囊11的自由端外边缘与弹性片15的端部相连,所述弹性片15的中部向靠近伸缩囊11的一侧弯曲,所述网口中部所对应的连杆6侧壁上对称开设有两组弧形状的凹槽16;伸缩囊11膨胀时能够带动弹性片15同步运动,直至弹性片15的两端运动至凹槽16中,此时弹性片15在自身弹力与相互吸引的磁性块14的压力下能够有效的伸长,并通过其端部对伸缩囊11的侧壁起到拉直绷紧的效果,使得伸缩囊11侧壁更紧密的贴合在连杆6侧壁上,从而能够对网口进行更有效的封堵,进一步减少外界的灰尘潮气对机器人造成的损坏。
34.如图4所示,所述伸缩囊11远离防护圈5中心点的一面设有集尘层17,所述集尘层17的两端分别与伸缩囊11的两端相连,所述集尘层17由海绵材料制成;伸缩囊11伸长时能够带动集尘层17同步伸长,使得海绵材质的集尘层17孔隙张开,此时灰尘能够落在覆盖在伸缩囊11表面的集尘层17孔隙中,当伸缩囊11收缩复位时,此时集尘层17能够同步收缩并使其表面的孔隙收缩,从而能够将灰尘杂质保存在内部,达到集尘的效果,减少伸缩囊11在张开时,其表面堆积的灰尘杂质从网口掉落内部的情况,且集尘层17在反复伸缩的过程中,能够促进内部的灰尘杂质向集尘层17内部流动,提高了集尘层17的集尘效果。
35.位于本体1底端的半球形壳上的伸缩囊11表面设置有若干贯通腔18;螺旋桨2在工作时,当本体1向上飞行的过程中,防护圈5处的气流从其顶部向其底部持续流动,此时流动的气流能够从底部伸缩囊11上的贯通腔18喷出,随后喷出的气体作用在其表面的集尘层17上,能够将集尘层17表面堆积的灰尘杂质吹落,从而提高了防护圈5底部集尘层17的清洁度。
36.实施例二:
37.如图5所示,对比实施例一,其中本发明的另一种实施方式为:所述本体1顶部的集尘层17外侧面所对应的连杆6侧壁上连接有挡板19,所述伸缩囊11的外边缘处设置有凸边20,所述挡板19与凸边20能够对收缩状态下的集尘层17外壁与侧壁进行遮挡;当位于防护圈5顶部的伸缩囊11带动集尘层17收缩时,此时该伸缩囊11与挡板19和凸边20能够对集尘层17进行包裹遮挡,减少螺旋桨2带动外界的气流从该网口流过时,将集尘层17中的灰尘杂质带入防护圈5内部的情况,进一步减少集尘层17中的灰尘杂质对机器人造成的污染。
38.所述伸缩囊11的自由端内侧连接有拉绳21,且各个伸缩囊11上的拉绳21另一端相互连接;当需要对集尘层17内部与伸缩囊11之间收集的灰尘杂质进行清理时,此时通过拉动拉绳21连接的节点,使得拉绳21能够同步带动伸缩囊11的自由端向防护圈5内部翻转,并将伸缩囊11的自由端与集尘层17的自由端相分离,从而使得伸缩囊11中收集的灰尘杂质能够方便快捷的清理。
39.所述集尘层17的自由端处设有吸附块22,所述吸附块22能够与一侧伸缩囊11内部的磁性块14相吸引,所述集尘层17与伸缩囊11的自由端之间所对应的连杆6上连接有限位
件23;集尘层17能够通过吸附块22与伸缩囊11内部磁性块14的吸引,将其自由端与伸缩囊11的自由端相连接,当通过拉绳21拉动伸缩囊11的自由端时,由于限位件23的作用,使得伸缩囊11的自由端在翻转至一定角度后,能够与集尘层17的自由端相脱离,不需逐个将集尘层17与伸缩囊11端部拉开,从而使得伸缩囊11与吸尘层17之间的灰尘杂质在清理时更加便捷。
40.工作原理:本发明中的巡检机器人通过在侧部设置一圈防护囊4,当机器人靠近设备时,防护囊4能够预先与设备进行撞击贴合,由于防护囊4内部为流动的气体,且其侧壁为能够自由伸缩的波浪形,使得防护囊4能够保持足够的弹性对机器人的撞击进行缓冲,减少本体1坠毁的风险,同时防护囊4的一侧在压缩后能够发生反弹,使得机器人能够向远离设备的一侧运动,从而使其有效的远离障碍物,减少机器人与障碍物的反复撞击,同时工作人员能够在办公室通过发布语音指令的形式,使得指令通过中央处理器传递至本体1上的语音播放器处进行语音播放,随后本体1上的语音识别系统在识别指令后,通过控制器控制机器人的检测状态或运行轨迹,使得机房在巡检时更加方便快捷;设置的防护圈5能够对机器人进行整体上的防护,进一步减少外界的设备与机器人发生碰撞的风险,且由于防护圈5上设置有网口,不影响螺旋桨2工作时防护圈5内外气体的流动,同时当机器人与障碍物发生撞击并坠落时,此时弹性的防护圈5能够对本体1进行缓冲与防护,减少机器人的损坏;当机器人在遇到障碍物掉落在地后,此时球形状的防护圈5能够在配重块8的作用下进行转动,使得配重块8始终处于防护圈5竖直方向上的底端,从而使得防护圈5内部的本体1能够有效的恢复至飞行状态,并能在螺旋桨2的作用下再次起飞并工作;当机器人处于非工作状态时,此时防护圈5在配重块8的作用下对压囊10进行挤压,使得压囊10中的气体通过气道12分别流入各个网口的伸缩囊11中,并使其膨胀,同时膨胀后的伸缩囊11能够带动磁性块14相互靠近,并通过磁性块14的相互吸引促进伸缩囊11端部的接触贴合,从而使得对称两伸缩囊11能够将网口进行封堵,减少外界的灰尘潮气对机器人所造成的污染损坏,当机器人工作时且螺旋桨2转动时,一部分气流在对称两伸缩囊11之间的间隙中流动,随着机器人与防护圈5的逐渐上升,压囊10受到的外力也逐渐消失,此时伸缩囊11在弹性体13的作用下收缩复位,使得对称两伸缩囊11之间能够重新打开,从而不影响螺旋桨2工作时防护圈5内外气体的流动;伸缩囊11膨胀时能够带动弹性片15同步运动,直至弹性片15的两端运动至凹槽16中,此时弹性片15在自身弹力与相互吸引的磁性块14的压力下能够有效的伸长,并通过其端部对伸缩囊11的侧壁起到拉直绷紧的效果,使得伸缩囊11侧壁更紧密的贴合在连杆6侧壁上,从而能够对网口进行更有效的封堵,进一步减少外界的灰尘潮气对机器人造成的损坏;伸缩囊11伸长时能够带动集尘层17同步伸长,使得海绵材质的集尘层17孔隙张开,此时灰尘能够落在覆盖在伸缩囊11表面的集尘层17孔隙中,当伸缩囊11收缩复位时,此时集尘层17能够同步收缩并使其表面的孔隙收缩,从而能够将灰尘杂质保存在内部,达到集尘的效果,减少伸缩囊11在张开时,其表面堆积的灰尘杂质从网口掉落内部的情况,且集尘层17在反复伸缩的过程中,能够促进内部的灰尘杂质向集尘层17内部流动,提高了集尘层17的集尘效果;螺旋桨2在工作时,当本体1向上飞行的过程中,防护圈5处的气流从其顶部向其底部持续流动,此时流动的气流能够从底部伸缩囊11上的贯通腔18喷出,随后喷出的气体作用在其表面的集尘层17上,能够将集尘层17表面堆积的灰尘杂质吹落,从而提高了防护圈5底部集尘层17的清洁度;当位于防护圈5顶部的伸缩囊11带动集尘层17收缩时,此时
该伸缩囊11与挡板19和凸边20能够对集尘层17进行包裹遮挡,减少螺旋桨2带动外界的气流从该网口流过时,将集尘层17中的灰尘杂质带入防护圈5内部的情况,进一步减少集尘层17中的灰尘杂质对机器人造成的污染;当需要对集尘层17内部与伸缩囊11之间收集的灰尘杂质进行清理时,此时通过拉动拉绳21连接的节点,使得拉绳21能够同步带动伸缩囊11的自由端向防护圈5内部翻转,并将伸缩囊11的自由端与集尘层17的自由端相分离,从而使得伸缩囊11中收集的灰尘杂质能够方便快捷的清理;集尘层17能够通过吸附块22与伸缩囊11内部磁性块14的吸引,将其自由端与伸缩囊11的自由端相连接,当通过拉绳21拉动伸缩囊11的自由端时,由于限位件23的作用,使得伸缩囊11的自由端在翻转至一定角度后,能够与集尘层17的自由端相脱离,不需逐个将集尘层17与伸缩囊11端部拉开,从而使得伸缩囊11与吸尘层17之间的灰尘杂质在清理时更加便捷。
41.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。