1.本实用新型涉及机器人领域,尤其涉及一种工业机器人应急处理装置。
背景技术:
2.机器人是近代自动控制领域中出现的一项新技术,并成为现代机械制造中的一个重要组成部分。机器人显著地提高了劳动生产率,改善产品质量,对改善劳动条件和产品的快速更新换代起着十分重要的作用,加快实现工业生产机械化和自动化的步伐。尤其在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。因而受到各先进国家的重视,投入大量人力物力加以研究和应用。以焊接机械手臂为例,采用机械手臂,显著的提高了劳动效率,改善了产品质量,同时也提高了公认的工作环境,优势明显。但是机械手臂同时也存在其缺点,例如当工业用电供电异常时,就会影响产品质量,同时焊枪和产品不能分离,不利于产品拿出,会损坏产品;并且,当忽然来电后,会产生电脉冲,对产品造成伤害,降低产品质量。所以应对这种突发情况,设计一种应急装置就显得尤为重要。
技术实现要素:
3.本实用新型提供了一种工业机器人应急处理装置,所述装置包括:备份电池单元bbu、电池管理单元、位置传感器、电压传感器、电流传感器、伺服电机、变压器、继电器、dc/ac转换单元、plc控制单元、手臂复位控制单元、显示屏;
4.所述变压器与伺服电机连接;电池管理单元与备份电池单元bbu、plc控制单元连接;所述dc/ac转换单元与继电器、plc控制单元相连;所述plc控制单元分别与电压传感器和电流传感器相连;plc控制单元连接位置传感器,plc控制单元与手臂复位控制单元连接;所述显示屏与plc控制单元相连;
5.所述位置传感器,用于实时检测机器人手臂的位置;
6.所述电流传感器,用于检测机械手臂中线路的电流,判断线路有无断路或短路;
7.所述电压传感器,用于检测供电电压,以使机械手臂在预定电压下工作;
8.所述dc/ac转换单元,使直流电转换成交流电;
9.所述plc控制单元,用于当电压或电流传感器显示出现异常时,plc控制单元控制继电器把备份电池单元bbu接入电路,dc/ac转换单元把直流电转换成交流电,开始向电路供电;
10.所述手臂复位控制单元,用于控制手臂完成复位动作;
11.所述显示屏,用于参数设置及查看。
12.进一步地,所述备份电池单元包括热相变材料,所述材料为柔性固态材料。
13.进一步地,所述备份电池单元包括电极和隔膜,所述电极和隔膜一体化。
14.本实用新型与现有技术相比,具有以下优点:
15.当机械手臂突然供电异常时,在控制系统的控制下,迅速把bbu接入电路,同时手臂应急控制系统起作用,控制机械手臂完成手臂复位动作,恢复到待机状态,同时位置传感
器实时监测手臂位置,确保复位完成。
附图说明
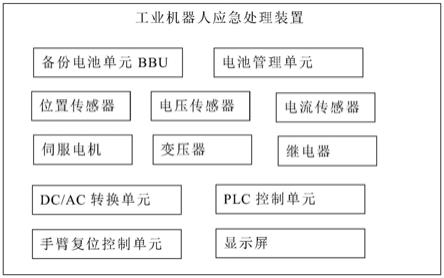
16.图1是本实用新型提供的一种工业机器人应急处理装置示意图。
具体实施方式
17.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
18.图1是本实用新型提供的一种工业机器人应急处理装置,所述装置包括:备份电池单元bbu、电池管理单元、位置传感器、电压传感器、电流传感器、伺服电机、变压器、继电器、dc/ac转换单元、plc控制单元、手臂复位控制单元、显示屏;
19.所述变压器与伺服电机连接;电池管理单元与备份电池单元bbu、plc控制单元连接;所述dc/ac转换单元与继电器、plc控制单元相连;所述plc控制单元分别与电压传感器和电流传感器相连;plc控制单元连接位置传感器,plc控制单元与手臂复位控制单元连接;所述显示屏与plc控制单元相连;
20.所述位置传感器,用于实时检测机器人手臂的位置;
21.所述电流传感器,用于检测机械手臂中线路的电流,判断线路有无断路或短路;
22.所述电压传感器,用于检测供电电压,以使机械手臂在预定电压下工作;
23.所述dc/ac转换单元,使直流电转换成交流电;
24.所述plc控制单元,用于当电压或电流传感器显示出现异常时,plc控制单元控制继电器把备份电池单元bbu接入电路,dc/ac转换单元把直流电转换成交流电,开始向电路供电;
25.所述手臂复位控制单元,用于控制手臂完成复位动作;
26.所述显示屏,用于参数设置及查看。
27.plc控制单元,可编程逻辑控制器控制单元。
28.进一步地,所述备份电池单元包括热相变材料,所述材料为柔性固态材料。
29.进一步地,所述备份电池单元包括电极和隔膜,所述电极和隔膜一体化。
30.本实用新型装置的工作原理为:当plc控制单元检测到bbu的电能不足时,控制电池管理单元向bbu充电。电压传感器和电流传感器实时监测机械手臂的电压和其线路的电流,当电压或电流传感器显示出现异常时,plc控制系统控制继电器开关把bbu接入电路,dc/ac转换单元把直流电转换成交流电,开始向电路供电,同时,通过变压器,确保伺服电机在额定电压下工作。bbu持续放电使伺服电机继续工作30秒以上,用以使机械手臂有足够的时间复位,顺利完成复位动作,便于后续工件取出,保证该工件质量。显示器直接与plc控制单元连接,可提供参数设置及查看功能,用以供工人操作和查看。
31.本实用新型取代了传统的铅酸电池作为后备电源,克服了其寿命短,维修困难的缺点,提供一种寿命长、体积小、可拓展、免维护、能耗低的基于锂电池的机械手臂应急安全应急装置,该bbu采用嵌入式,方便取出维修。bbu电池的关键技术是电极和隔膜一体化,其优势为:降低锂离子迁移距离,减少电池的内阻;减少了电池电极间的几何体积,提高了能
量密度;电池和电极更加稳定,具备更长寿命;使用半固态的电解质,几乎解决了电池的气鼓现象,提高设备安全性。同时,bbu电池极大提速了bms的信号采集,从而能快速实现动态实时监控管理,使soc测量精度《3%,延长电池循环寿命3倍,提高bbu的系统安全性。此外,bbu电池使用了热相变管理材料,该材料为柔性固态,能通过相变大量吸收热量而不发生形变,且该吸热材料能反复使用。
32.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种工业机器人应急处理装置,其特征在于,所述装置包括:备份电池单元bbu、电池管理单元、位置传感器、电压传感器、电流传感器、伺服电机、变压器、继电器、dc/ac转换单元、plc控制单元、手臂复位控制单元、显示屏;所述变压器与伺服电机连接;电池管理单元与备份电池单元bbu、plc控制单元连接;所述dc/ac转换单元与继电器、plc控制单元相连;所述plc控制单元分别与电压传感器和电流传感器相连;plc控制单元连接位置传感器,plc控制单元与手臂复位控制单元连接;所述显示屏与plc控制单元相连;所述位置传感器,用于实时检测机器人手臂的位置;所述电流传感器,用于检测机械手臂中线路的电流,判断线路有无断路或短路;所述电压传感器,用于检测供电电压,以使机械手臂在预定电压下工作;所述dc/ac转换单元,使直流电转换成交流电;所述plc控制单元,用于当电压或电流传感器显示出现异常时,plc控制单元控制继电器把备份电池单元bbu接入电路,dc/ac转换单元把直流电转换成交流电,开始向电路供电;所述手臂复位控制单元,用于控制手臂完成复位动作;所述显示屏,用于参数设置及查看。2.如权利要求1所述的工业机器人应急处理装置,其特征在于,所述备份电池单元包括热相变材料,所述材料为柔性固态材料。3.如权利要求1所述的工业机器人应急处理装置,其特征在于,所述备份电池单元包括电极和隔膜,所述电极和隔膜一体化。
技术总结
本实用新型公开了一种工业机器人应急处理装置,其特征在于,所述装置包括:备份电池单元BBU、电池管理单元、位置传感器、电压传感器、电流传感器、伺服电机、变压器、继电器、DC/AC转换单元、PLC控制单元、手臂复位控制单元、显示屏。屏。屏。
技术研发人员:桂裕鹏
受保护的技术使用者:广东硅岳能源科技有限公司
技术研发日:2021.04.06
技术公布日:2022/2/15