1.本发明属于可穿戴外肢体技术领域,具体公开了一种肩部随人体大臂摆动的外肢体机器人。
背景技术:
2.随着人口老龄化情况的加剧以及人们工作观念的转变,劳动力短缺问题逐渐凸显,建筑业、制造业这类劳动强度高、工作环境差的行业也越来越不被年轻人认可。因此,解决劳动力短缺问题、改善工作条件成为目前中国乃至全世界发展须解决的难题。随着机器人技术的发展与逐渐成熟,大规模应用机器人成为破解劳动力短缺难题的重要手段。
3.汽车、手机、芯片等产品生产批量大、制造工艺成熟,可以采用高度自动化的生产线对其进行加工,但在飞机制造、建筑装修行业,由于空间、规模、技术、成本等条件的限制,大规模、标准化的加工方式并不适用。单纯依靠机器人与自动化设备的配合同样难以应用于类似场景。
4.在人机合作方面,研究人员近年来已经做了较多探索,其中较为成熟的研究包括对协作机器人和外骨骼机器人的研究。由于协作机器人的自主移动性较差、外骨骼机器人关节受限缺陷,研究人员也在探索新型机器人。外肢体机器人在人体躯干或四肢固定机械臂或机械手,可以在极大程度上补充或扩展人的工作能力,对于第3只手的相关研究表明人体完全能够胜任对第3只手的控制,这为外肢体机器人的研究提供了前提。同时,大量的针对脑机接口控制、肌电控制、肢体映射等控制方式的研究为外肢体机器人的研究奠定了基础。
5.在专利号为cn112643651a的发明专利中,公布了一种可伸缩的仿生外肢体机械臂,其中肩关节模块包括连杆柱和多个肩关节伺服电机,但其只是将机械臂的基座设为人体,并未设计如何与人体配合,同时其不存在被动关节,所有自由度均由电机驱动而与人体无关,与人体适配性不高。
技术实现要素:
6.本发明的目的在于提供一种肩部随人体大臂摆动的外肢体机器人,解决了现在外肢体机器人与人体适配性不高,人体难以自如控制的问题。
7.实现本发明目的的技术解决方案为:一种肩部随人体大臂摆动的外肢体机器人,包括背架机构和对称设置在背架机构两侧的两组上肢机构;
8.每组上肢机构包括由抓手机构(1)、手部支架机构(2)、小臂机构(3)、大臂机构(4)和肩部机构(5)组成的六自由度串联机械臂机构,还包括人体大臂连接机构(6);
9.背架机构由竖杆和中部与竖杆连接的直角类c型杆组成,所述肩部机构为由平板、竖板和连接平板与竖板的斜板组成;每个肩部机构的平板端部和背架机构的直角类c型杆的端部转动连接,使得肩部机构在水平面内与背架机构转动连接;人体大臂连接机构的一端和肩部机构的竖板的端部转动连接,使得人体大臂连接机构相对于肩部机构在竖直面上
转动,且旋转轴线与人体肩关节位于同一水平高度;人体大臂连接机构、背架机构与人体通过绑带固定,使得肩部机构、人体大臂连接机构、背架机构与人体大臂共同形成含两个自由度的空间连杆机构,使得六自由度串联机械臂机构基座随人体大臂旋转。
10.进一步的,人体大臂连接机构和背架机构与人体连接的绑带可调。
11.进一步的,所述手部支架机构包括手部连接架、第一舵机、舵机连接架和第二舵机;
12.所述手部连接架一端与抓手机构连接,另一端与舵机连接架连接,所述舵机连接架包括上u型板、下u型板,下u型板的侧板和上u型板的底板固定连接,第一舵机通过内u型板设置在下u型板内,所述第一舵机输出轴方向与手部连接架轴向同向;第二舵机设置在上u型板内,第二舵机输出轴方向与手部连接架轴向垂直,第一舵机输出轴轴线与第二舵机输出轴轴线位于同一平面。
13.进一步的,所述手部支架机构还包括皮卡汀尼导轨和导轨连接架,皮卡汀尼导轨通过导轨连接架连接在手部连接架上,皮卡汀尼导轨上可加装多种标准化扩展单元。
14.进一步的,小臂机构包括小臂连接架、小臂舵机架、小臂陀螺仪、小臂电机和小臂舵机;
15.小臂连接架一端与小臂舵机的输出轴连接,另一端通过u型板和第二舵机的外壳连接;小臂舵机架包括l型板和固定在l型板竖板内侧的小u型板组成,l型板竖板的末端通过连接孔与小臂电机的输出轴连接,小臂舵机通过小u型板固定在l型板上,小臂舵机的输出轴与小臂连接架连接,使得小臂舵机驱动小臂连接架绕轴向旋转运动;小臂电机输出轴轴线与小臂舵机输出轴轴线位于同一平面且垂直,所述小臂陀螺仪通过螺栓联接固定在所述小臂舵机架上。
16.进一步的,所述大臂机构依次包括大臂连接架、大臂舵机架、大臂陀螺仪、大臂电机和大臂舵机;
17.所述大臂连接架一端通过圆形安装孔与小臂电机连接,大臂舵机固定在大臂舵机架上且输出轴与大臂连接架连接,驱动大臂连接架绕轴向旋转运动;大臂电机与小臂舵机架相连接,大臂陀螺仪通过固定在大臂舵机架上,大臂电机输出轴轴线与大臂舵机输出轴轴线在同一平面且垂直。
18.进一步的,第一舵机与第二舵机中设有编码器,用于测量手部支架机构的姿态,获取手部支架机构控制的反馈信号;
19.小臂舵机与小臂电机中均设有编码器,用于测量小臂机构的姿态;
20.大臂舵机与大臂电机中均设有编码器,用于测量大臂机构的姿态。
21.本发明与现有技术相比,其显著优点在于:
22.(1)本发明通过人体大臂连接机构与肩部机构转动连接,肩部机构与背架机构转动连接,使得人通过大臂的自由运动带动人体大臂连接机构与肩部机构的运动,而大臂机构与肩部机构固定连接,人的大臂在带动肩部机构运动时可直接驱动外肢体机械臂大臂机构的基座运动,有效简化了人对外肢体机械臂的控制。
23.(2)本发明手部连接架上安装有皮卡汀尼导轨,可以安装多种标准化扩展单元。
24.(3)本发明两组上肢机构各有6个自由度,具有较大的活动范围与灵活性,可以在大部分情况下不影响人体运动进行作业。
25.(4)本发明手部支架机构、小臂机构、大臂机构分别装有惯性测量单元,可以对整个机械臂而非只是机械臂末端进行闭环反馈控制,从而大大减小外肢体与人体或环境之间的干涉。
附图说明
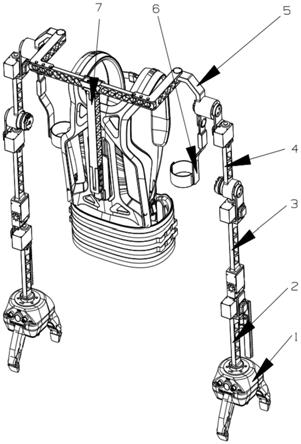
26.图1为本发明的外肢体机器人整体示意图。
27.图2为本发明手部支架机构示意图。
28.图3为本发明舵机连接架结构示意图。
29.图4为本发明小臂机构示意图。
30.图5为本发明大臂机构示意图。
31.图6为本发明肩部连接示意图。
32.图7为本发明控制方法流程图。
33.附图标记说明:
34.1-抓手机构,2-手部支架机构,3-小臂机构,4-大臂机构,5-肩部机构,6-人体大臂连接机构,7-背架机构,2-1-手部连接架,2-2-第一舵机,2-3-舵机连接架,2-4-第二舵机,2-5-皮卡汀尼导轨,2-6-导轨连接架,3-1-小臂连接架,3-2-小臂舵机架,3-3-小臂陀螺仪,3-4-小臂电机,3-5-小臂舵机,4-1-大臂连接架,4-2-大臂舵机架,4-3-大臂陀螺仪,4-4-大臂电机,4-5-大臂舵机。
具体实施方式
35.下面结合附图对本发明作进一步详细描述。
36.一种肩部随人体大臂摆动的外肢体机器人,包括背架机构7和对称设置在背架机构7两侧的两组上肢机构,所述上肢机构包括抓手机构1、手部支架机构2、小臂机构3、大臂机构4、肩部机构5及人体大臂连接机构6;
37.所述大臂机构4与所述小臂机构3、所述小臂机构3与所述肩部机构7分别通过螺栓固定连接;所述肩部机构5分别与所述大臂机构4、所述人体大臂连接机构6转动连接,与人体共同构成含两个被动自由度的连杆机构,这两个被动自由度跟随人体肩部运动,其中一个被动自由度使得机械臂的基座随人体大臂绕人体躯干方向运动。
38.结合图2与图3,手部支架机构2包括手部连接架2-1、第一舵机2-2、舵机连接架2-3、第二舵机2-4、皮卡汀尼导轨2-5、导轨连接架2-6;其中,手部连接架2-1与第一舵机2-2通过第一舵机2-2上的舵机输出轴与手部连接架2-1末端的孔连接;舵机连接架2-3为三个u形板固定连接而成,最上方的大u形板底部与下方的大u形板侧面接触固定,下方的u形板内侧与第三块小u形板底部外侧接触固定;第一舵机2-2与舵机连接架2-3通过第一舵机2-2机身上的螺纹孔与舵机连接架2-3上的小u形板固定连接;第二舵机2-4与舵机连接架2-3通过第二舵机2-4上的舵机输出轴与舵机连接架2-3中最上方的大u形板侧面固定连接;导轨连接架2-6为与手部连接架2-1固定连接;皮卡汀尼导轨2-5与导轨连接架2-6通过螺栓固定连接。
39.其中,第一舵机2-2输出轴轴线与第二舵机2-4输出轴轴线位于同一平面且垂直。
40.其中,皮卡汀尼导轨上可加装多种标准化扩展单元。
41.其中,手部连接架2-1中含有惯性测量单元,可以测量手部支架机构的加速度数据,第一舵机2-2与第二舵机2-4中均含有编码器,可以测量手部支架机构2的姿态,获取手部支架机构控制的反馈信号。
42.结合图4,小臂机构3包括小臂连接架3-1、小臂舵机架3-2、小臂陀螺仪3-3、小臂电机3-4、小臂舵机3-5;其中,小臂连接架3-1主体为一杆件,杆件一端有用于与舵机轴连接的孔和禁锢螺钉,另一端有一u形槽,u形槽用于与手部支架机构2中的第二舵机2-4的外壳连接;小臂连接架3-1与小臂舵机3-5通过小臂舵机3-5上的舵机输出轴与小臂连接架3-1上的孔固定连接;小臂舵机架3-2为一个l形板与一个小u形板固定而成,l形板较长段末端开有用于与电机轴连接的孔,小u形板固定在l形板较长段内侧,用于固定舵机;小臂舵机3-5与小臂舵机架3-2通过小臂舵机3-5外壳上的螺纹孔与小臂舵机架3-2上小u形板固定连接;小臂陀螺仪3-3与小臂舵机架3-2固定连接;小臂电机3-4与小臂舵机架3-2通过小臂电机3-4上的电机输出轴与小臂舵机架3-2中l形板上的电机轴连接孔连接。
43.其中,小臂电机3-4输出轴轴线与小臂舵机3-5输出轴轴线位于同一平面且垂直。
44.其中,小臂陀螺仪3-3是惯性测量单元,可以测量小臂机构3的加速度数据,小臂舵机3-5与小臂电机3-4中均含有编码器,可以测量小臂机构3的姿态。
45.结合图5,大臂机构4包括大臂连接架4-1、大臂舵机架4-2、大臂陀螺仪4-3、大臂电机4-4、大臂舵机4-5;其中,大臂连接架4-1与大臂舵机4-5通过大臂舵机4-5上的舵机输出轴与大臂连接架4-1连接;大臂舵机4-5与大臂舵机架4-2通过大臂舵机4-5机身上的螺纹孔与大臂舵机架4-2上的通孔利用螺栓连接;大臂舵机架4-2为一个l形板与一个小u形板固定而成,l形板较长段末端开有用于与电机轴连接的孔,小u形板固定在l形板较长段内侧,用于固定舵机;大臂陀螺仪4-3与大臂舵机架4-2通过螺栓连接;大臂电机4-4与大臂舵机架4-2通过大臂电机4-4上的电机输出轴与大臂舵机架4-2连接。
46.其中,大臂电机4-4输出轴轴线与大臂舵机4-5输出轴轴线在同一平面且垂直。
47.其中,大臂陀螺仪4-3是惯性测量单元,可以测量大臂机构4的加速度数据,大臂舵机4-5与大臂电机4-4中均含有编码器,可以测量大臂机构4的姿态。
48.结合图1与图6,一种肩部随人体大臂摆动的外肢体机器人,包括背架机构7和对称设置在背架机构7两侧的两组上肢机构,其中,背架机构7为竖直放置的结构,通过背带固定在人体背部。所述上肢机构包括抓手机构1、手部支架机构2、小臂机构3、大臂机构4、肩部机构5及人体大臂连接机构6。其中,抓手机构1与手部支架机构2通过手部机构2中手部连接架2-1与抓手机构1进行固定连接,使得抓手机构1末端固定在手部支架2手部机构2中的手部连接架2-1上;手部支架机构2与小臂机构3通过手部支架机构2中第二舵机2-4的外壳与小臂机构3中的小臂连接架3-1中的u形槽进行固定连接,使得手部支架机构2中的第二舵机2-4固定在小臂机构3中的小臂连接架3-1上;小臂机构3与大臂机构4通过小臂机构3中小臂电机3-4上的外壳与大臂机构4中大臂连接架4-1固定连接,使得小臂机构3中的小臂电机3-4固定在大臂机构4中的大臂连接架4-1上;大臂机构4与肩部机构5通过大臂机构4中大臂电机4-4的外壳与肩部机构5上的通孔固定连接,使得大臂机构4中的大臂电机4-4固定在肩部机构5上;肩部机构5与背架机构7转动连接,肩部机构5与人体大臂连接机构6转动连接且旋转轴线与人体肩关节位于统一水平高度,人体大臂连接机构6、背架机构7与人体通过绑带固定,使得肩部机构5、人体大臂连接机构6、背架机构7与人体大臂共同形成含两个自由度
的空间连杆机构。
49.其中,人体大臂连接机构6与背架机构7上的绑带均可调节适应不同体型的穿戴者。
50.其中,肩部机构5、人体大臂连接机构6、背架机构7与人体大臂共同形成含两个自由度的空间连杆机构中,肩部机构5有一个绕背架机构7上的旋转自由度,即人体大臂可通过运动直接操作肩部机构5绕背架机构7上的转动连接轴旋转。
51.结合图7,一种肩部随人体大臂摆动的外肢体机器人,首先建立其数学模型,并佩戴相应的人体意图识别设备,使用人机协同控制,通过对人体意图的识别预测,明确人体运动状态和机器作业状态,然后对外肢体进行轨迹规划及跟踪控制。