1.本实用新型涉及隧道巡检设备技术领域,具体为一种隧道巡检机器人行走结构。
背景技术:
2.我国是目前世界上隧道和地下工程数量最多、发展速度最快、地质及结构形式最复杂的国家,由于自然条件如地下水、材料劣化、地震、冻害等,导致隧道产生严重的变异(病害)现象如开裂、错位、冻结、震灾、崩塌等,不仅大大缩短了结构物的使用寿命,而且隧道内异物坠落、侵限、渗水、线路老化火灾都可能会导致重大行车安全事故,给人民财产的安全带来极大风险。隧道巡检工作一直是隧道安全的基础和重要保障工作,由于监测项目多,线路长、测点多和数量大等原因,特别是超长隧道环境条件恶劣,封闭性强,构造物多,通讯不便。巡检人员的人身安全甚至难以得到有效保证,同时人工对隧道状态的检测方法十分有限,无法准确的判断隧道状态,影响隧道的及时维护。因此,隧道巡检机器人得到广泛的应用。巡检机器人是通过行走轮悬挂在轨道上沿着轨道行走,但由于地形原因造成隧道出现爬坡或下坡的路段,巡检机器人行走到这些路段时可能发生打滑现象,这种现象使得巡检机器人无法匀速的行走检测,进一步的降低巡检质量,同时浪费驱动能源,并且加速机器人内部零件磨损。
技术实现要素:
3.本实用新型的目的在于提供一种隧道巡检机器人行走结构,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种隧道巡检机器人行走结构,包括机座和轨道,所述机座的上部对称设置有固定板,两块固定板间转动设置有转轴;所述转轴的外侧套设有齿轮,转轴的外侧套设有第一皮带轮;所述机座的上部设置有伺服电机,伺服电机的主轴外侧套设有第二皮带轮,第二皮带轮与第一皮带轮间设置有同步带;所述机座的上部设置有与同步带相匹配的涨紧机构;所述轨道的下部设置有与齿轮啮合的齿条;两块所述固定板的上部设置有悬挂于轨道上的悬挂机构;所述机座的上部左右对称设置有与齿条相匹配的清洁机构。
5.优选的,所述悬挂机构包括连接杆、支撑轴和挂轮;所述固定板的上部对称设置有连接杆,连接杆的上端一侧贯穿设置有支撑轴;所述支撑轴的一端外侧套设有与轨道相匹配的挂轮。
6.优选的,所述涨紧机构包括支架、扭力弹簧、摆杆、销轴和涨紧轮;所述机座的上部一侧设置有支架,支架的一侧设置有销轴;所述销轴的外侧套设有扭力弹簧,扭力弹簧的外侧套设有摆杆;所述摆杆的一侧设置有与同步带相匹配的涨紧轮。
7.优选的,所述清洁机构包括支撑板、传动轴和清洁辊;所述机座的上部左右两侧均对称设置有支撑板,支撑板间转动设置有传动轴;所述传动轴的外侧套设有清洁辊,传动轴的外侧套设有驱动滚轮。
8.优选的,所述传动轴的两端套设有导向滑块;两块所述支撑板的相对侧面均开设有与导向滑块相匹配的导向滑槽;所述导向滑块的下端设置有顶紧弹簧。
9.与现有技术相比,本实用新型提供了一种隧道巡检机器人行走结构,具备以下有益效果:
10.1、通过齿轮与齿条间的啮合传动,使得巡检机器人行走更加匀速,避免出现打滑的现象产生。
11.2、通过在机座的上部对称设置的清洁机构,使得清洁机构能够在齿轮与齿条啮合前进行清扫,避免齿条上粘连的异物对运动造成阻碍。
附图说明
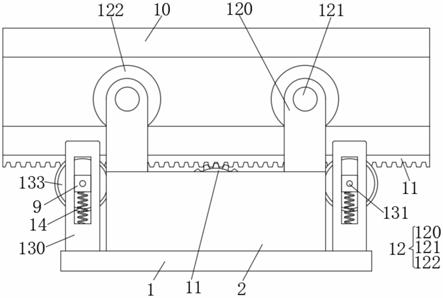
12.图1为本实用新型的主视图;
13.图2为本实用新型的主视剖视图;
14.图3为本实用新型的右视图。
15.图中:机座1、固定板2、转轴3、齿轮4、第一皮带轮5、伺服电机6、第二皮带轮7、同步带8、导向滑块9、轨道10、齿条11、悬挂机构12、连接杆120、支撑轴121、挂轮122、清洁机构13、支撑板130、传动轴131、清洁辊132、驱动滚轮133、顶紧弹簧14。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.请参阅图1-3,本实用新型提供的一种隧道巡检机器人行走结构实施例:一种隧道巡检机器人行走结构,包括机座1和轨道10,机座1的上部对称设置有固定板2,两块固定板2间转动设置有转轴3,转轴3的外侧套设有齿轮 4,转轴3的外侧套设有第一皮带轮5,机座1的上部设置有伺服电机6,伺服电机6的主轴外侧套设有第二皮带轮7,第二皮带轮7与第一皮带轮5间设置有同步带8,轨道10的下部设置有与齿轮4啮合的齿条11,两块固定板2 的上部设置有悬挂于轨道10上的悬挂机构12,机座1的上部左右对称设置有与齿条11相匹配的清洁机构13,通过伺服电机6驱动第一皮带轮7旋转,经同步带8传动使得第一皮带轮5同步转动,经转轴3带动齿轮4旋转运动,再通过齿轮4与齿条11间的啮合传动,使得巡检机器人可以匀速前进,避免了打滑现象的产生,通过清洁机构13对齿条11的表面进行清洁,从而使得巡检机器人行走更加顺畅。
18.在本实施中,如图1所示,悬挂机构12包括连接杆120、支撑轴121和挂轮122,固定板2的上部对称设置有连接杆120,连接杆120的上端一侧贯穿设置有支撑轴121,支撑轴121的一端外侧套设有与轨道10相匹配的挂轮 122,通过挂轮122与轨道1进行挂接。
19.在本实施中,如图3所示,清洁机构13包括支撑板130、传动轴131和清洁辊132,机座1的上部左右两侧均对称设置有支撑板130,支撑板130间转动设置有传动轴131,传动轴131的外侧套设有清洁辊132,传动轴131的外侧套设有驱动滚轮133,通过支撑板130带动传动轴131水平移动,从而使得驱动滚轮133沿着轨道10转动,从容使得带动清洁辊132旋转对
齿条11 进行清洁。
20.在本实施中,如图1和图2所示,传动轴131的两端套设有导向滑块9,两块支撑板130的相对侧面均开设有与导向滑块9相匹配的导向滑槽,导向滑块9的下端设置有顶紧弹簧14,通过顶紧弹簧14推动导向滑块9沿着导向滑槽向上滑动,从而使得驱动滚轮133与轨道10的下表面紧密贴合。
21.工作原理:工作时,利用伺服电机6驱动第一皮带轮7旋转,经同步带8 传动使得第一皮带轮5同步转动,经转轴3带动齿轮4旋转运动,再通过齿轮4与齿条11间的啮合传动,使得巡检机器人可以匀速前进,避免了打滑现象的产生,再利用顶紧弹簧14推动导向滑块9沿着导向滑槽向上滑动,从而使得驱动滚轮133与轨道10的下表面紧密贴合,同时利用支撑板130带动传动轴131水平移动,从而使得驱动滚轮133沿着轨道10转动,从容使得带动清洁辊132旋转对齿条11进行清洁。
22.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
23.在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上,术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
24.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。