1.本发明涉及机器人相关技术领域,具体为一种驱动器及具有该驱动器的机械手。
背景技术:
2.作为模块化的机械手,驱动器的尺寸决定了机械手最终的集成度。现有驱动器体积较大,难以安装在机械手与机械臂之间的连接位置,导致驱动器安装位置距离机械手较远,影响了机械手的集成度,同时,也降低了机械手与驱动器之间的通信速度,因此设计出一款小尺寸的驱动器对机械手的应用而言有着重要意义,针对上述问题,提出了本申请。
技术实现要素:
3.本发明的目的在于在于提供一种小尺寸的驱动器。
4.本发明是通过以下技术方案来实现的。
5.本发明的一种驱动器,包括多个驱动器子单元,多个所述驱动器子单元采用阵列的方式安装。
6.进一步地,所述驱动器子单元之间为可拆卸安装。
7.进一步地,所述驱动器子单元上设有插孔,排针穿过每个所述驱动器子单元上的所述插孔,将多个所述驱动器子单元联接构成驱动器阵列。
8.进一步地,所述驱动器子单元上设有电流传感器。
9.进一步地,所述驱动器子单元上设有电压转换模块。
10.进一步地,所述驱动器子单元上还设有滤波器。
11.进一步地,所述驱动器子单元上设有通讯芯片。
12.进一步地,所述通讯芯片为can通讯芯片。
13.进一步地,每个所述驱动器子单元之间的距离为2.8
±
0.2mm。
14.一种具有驱动器的机械手,包括机械手主体和机械手连接件,所述机械手连接件中设有插槽,所述插槽中安装有驱动器。
15.本发明的有益效果:
16.将多个所述驱动器子单元联接,从而使得多个驱动器子单元相互联接形成整体,构成驱动器阵列,实现驱动器的集成,体积小巧,便于应用,使得机械手形成模块化,方便生产、组装、检修,且采用阵列形式的驱动器,使得机械手的集成度更高,继而使得机械手的功能更为丰富,可以满足更多的使用需求,应用更为广泛,并且,驱动器距离机械手更近,能够提高通信速度,降低控制延迟。
17.通过设置滤波模块对电机内编码盘信号的滤波处理,得到了准确的脉冲计数信号,使得机械手能够实现准确的位置控制和位置反馈。
18.电流传感器和电压信号的读取,既可以控制电机的转速又可以得到电机的力矩大小,使得整个系统变得安全可靠。
附图说明
19.为了更清楚地说明发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
20.下面结合附图和实施例对本发明进一步说明。
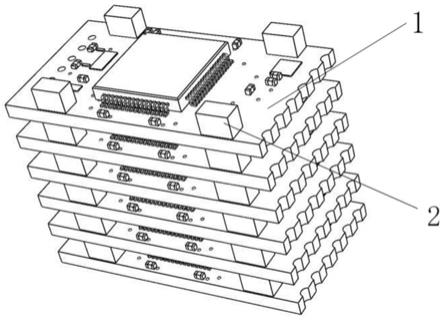
21.图1是本发明的一种驱动器的整体结构示意图;
22.图2是驱动器子单元的结构示意图;
23.图3是机械手的结构示意图。
具体实施方式
24.下面结合图1-3对本发明进行详细说明。
25.本发明的一种驱动器,如图1所示,一种驱动器,包括多个驱动器子单元1、设于驱动器子单元1上的插孔及穿设于插孔内的排针2;驱动器为多个驱动器子单元1叠加构成的驱动器阵列,每个驱动器子单元1上均开设有插孔,排针2穿过每个驱动器子单元1上的插孔,将多个所述驱动器子单元1联接,从而使得多个驱动器子单元1相互联接形成整体,构成驱动器阵列,每个驱动器子单元之间的距离为2.8
±
0.2mm,实现驱动器的集成,体积小巧,便于应用,使得应用了本申请中驱动器的机械手或其他设备的集成度更高,使机械手得到了更为广泛的应用。
26.如图2所示,在一些实施例中,驱动器子单元1包括pcb板、电流传感器、电压转换模块、can(控制器局域网络)通讯芯片、、滤波模块、电机驱动芯片及中央芯片;其中中央芯片和电机驱动芯片安装在pcb板的同一面上,称之为正面;电流传感器、电压转换模块及can通讯芯片均安装在pcb板的另一面上,称之为反面;电流传感器为ina213型电流传感器,电压转换模块为lp38691型电压转换模块,can通讯芯片为mcp2561型can通讯芯片,电机驱动芯片为drv8838型电机驱动芯片,中央芯片为stm32芯片,每一个驱动子单元1在驱动阵列中拥有独立的编号且可替换,采用can通讯的方式使得整个系统具有很高的实时性。
27.通过设置滤波模块对电机内编码盘信号的滤波处理,得到了准确的脉冲计数信号,实现了对机械手高精度的位置控制。
28.电流传感器和电压信号的读取,既可以控制电机的转速又可以得到电机的力矩大小,使得整个系统变得安全可靠。
29.如图3所示,本发明还提供了一种具有驱动器的机械手,包括依次联接的机械手主体10和机械手连接件11,所述机械手连接件11中设有插槽12,还包括臂部连接件13,臂部连接件13中也设有插槽,机械手连接件11和臂部连接件13之间的插槽形成安装空间,驱动器20安装在安装空间内,该驱动器即为上述的一种驱动器20,使得机械手形成模块化,方便生产、组装、检修,且采用阵列形式的驱动器,使得机械手的集成度更高,继而使得机械手的功能更为丰富,可以满足更多的使用需求,应用更为广泛。
30.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此领域技术的人士能够了解本发明内容并加以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围内。
技术特征:
1.一种驱动器,其特征在于:包括多个驱动器子单元(1),多个所述驱动器子单元(1)采用阵列的方式安装。2.根据权利要求1所述的一种驱动器,其特征在于:所述驱动器子单元(1)之间为可拆卸安装。3.根据权利要求2所述的一种驱动器,其特征在于:所述驱动器子单元(1)上设有插孔,排针(2)穿过每个所述驱动器子单元(1)上的所述插孔,将多个所述驱动器子单元(1)联接构成驱动器阵列。4.根据权利要求2所述的一种驱动器,其特征在于:所述驱动器子单元(1)上设有电流传感器。5.根据权利要求1-4中任意一项所述的一种驱动器,其特征在于:所述驱动器子单元(1)上设有电压转换模块。6.根据权利要求5所述的一种驱动器,其特征在于:所述驱动器子单元(1)上还设有滤波器。7.根据权利要求6所述的一种驱动器,其特征在于:所述驱动器子单元(1)上设有通讯芯片。8.根据权利要求7所述的一种驱动器,其特征在于:所述通讯芯片为can通讯芯片。9.根据权利要求1-4、6-8中任意一项所述的一种驱动器,其特征在于:每个所述驱动器子单元(1)之间的距离为2.8
±
0.2mm。10.一种具有驱动器的机械手,其特征在于:包括机械手主体(10)和机械手连接件(11),所述机械手连接件(11)中设有插槽(12),所述插槽(12)中安装有驱动器,所述驱动器为权利要求1-9中任意一项所述的驱动器。
技术总结
本发明涉及机器人相关技术领域,公开了一种驱动器及具有该驱动器的机械手,包括多个驱动器子单元,多个所述驱动器子单元采用阵列的方式安装,将多个所述驱动器子单元联接,从而使得多个驱动器子单元相互联接形成整体,构成驱动器阵列,实现驱动器的集成,体积小巧,便于应用,使得机械手形成模块化,方便生产、组装、检修,且采用阵列形式的驱动器,使得机械手的集成度更高,继而使得机械手的功能更为丰富,可以满足更多的使用需求,应用更为广泛,并且,驱动器距离机械手更近,能够提高通信速度,降低控制延迟。低控制延迟。低控制延迟。
技术研发人员:王宏涛 程绍文 金永斌
受保护的技术使用者:浙江大学杭州国际科创中心
技术研发日:2021.11.12
技术公布日:2022/2/15