1.本发明涉及动态建筑领域,特别是指一种动态建筑实时模拟与验证系统。
背景技术:
2.目前,动态建筑在世界范围内也都处于探索阶段,已有一些案例,例如一些体育馆的屋顶可实现开合,一些建筑立面表皮的变化,但目前的探索多局限于建筑表面的一些变化,缺少体量上的变化;同时,可以预见的是可动性是未来建筑的发展方向之一,它具有更好的环境适应性、便捷性、智能性、空间可变性等诸多优点,但目前国内尚未对其进行系统性的研究,因此其研究与模拟平台更是一大空白。
3.3d打印(3dp)是快速成型技术的一种,它是一种以数字模型文件为基础,运用粉末状金属或塑料等可粘合材料,通过逐层打印的方式来构造物体的技术。现今市场上3d打印技术及设备日益月新,各行各业都在利用新的3d打印技术完成产品创新;在建筑设计领域的应用,3d打印技术主要是运用在大型建筑的主体设计层面,通过这项技术帮助设计出建筑师最初的想法,完美的还原建筑。
4.装配式建筑与模块化建筑:装配式建筑是指把传统建造方式中的大量现场作业工作转移到工厂进行,在工厂加工制作好建筑用构件和配件(如楼板、墙板、楼梯、阳台等),运输到建筑施工现场,通过可靠的连接方式在现场装配安装而成的建筑。而模块化建筑通过将建筑划分为各种单元,通过工厂预制,然后在现场安装,它具有可拆卸,同时通过安装不同的功能模块来实现不同的功能,类似与搭积木或乐高玩具。由此可见,装配式与模块化技术具有一定的相似性。
5.对于大尺寸、高精度的复杂构造与空间的建筑模拟与建造,国内缺乏合适的研究与建造平台,往往不得不进行手工建造与搭建,缺乏自动化机械化的实验平台,使得在建筑研究与模拟建造中效率低下,并且很难以较高的精度实现复杂构造与造型的模拟与建造,具有很大的局限性。
6.目前,对动态建筑的研究国内存在空白,更是缺少研究与模拟平台;另外,目前3d打印主要还是运用在建筑主体的打印上,缺乏对其他建筑构件进行配套打印与安装,往往需要工厂预制,或者安装标准建筑构件,缺乏与装配式与模块化技术的优势进行结合,进一步完善整个建造体系,形成一整套系统。
技术实现要素:
7.为解决上述技术问题,本发明提供一种动态建筑实时模拟与验证系统,实现了对动态建筑空间可变方式的实时模拟与验证,以及动态建筑及其构件等模型产品的建造与打印。
8.本发明提供技术方案如下:
9.一种动态建筑实时模拟与验证系统,包括桁架机器人、六轴机械手臂和垂直液压升降台,其中:
10.所述桁架机器人为多轴联动机构,所述多轴联动机构包括使得所述桁架机器人在x轴、y轴和z轴方向上移动的x轴组件、y轴组件和z轴组件;所述六轴机械手臂安装在所述桁架机器人上,并且所述六轴机械手臂能够在所述桁架机器人的带动下在x轴、y轴和z轴方向上移动;
11.所述垂直液压升降台安装在所述桁架机器人的下方,所述垂直液压升降台包括多个正方形的液压升降单元,每个液压升降单元能够单独垂直升降,或者数个液压升降单元组合同步垂直升降;
12.所述六轴机械手臂配备有操作工装,所述操作工装包括多种3d打印头、夹爪、钻头、切割头、焊枪和吸盘。
13.进一步的,所述桁架机器人还包括x轴动力机构、y轴动力机构和z轴动力机构;
14.所述y轴动力机构安装在y轴组件上,所述x轴组件安装在y轴动力机构上,所述x轴组件和y轴动力机构在所述y轴动力机构的驱动下沿y轴运动;
15.所述x轴动力机构安装在x轴组件上,所述z轴动力机构安装在x轴动力机构上,所述z轴组件安装在z轴动力机构上,所述x轴动力机构、z轴动力机构和z轴组件在所述x轴动力机构的驱动下沿x轴运动;
16.所述六轴机械手臂安装在所述z轴组件上,所述z轴组件和六轴机械手臂在所述z轴动力机构的驱动下沿z轴运动。
17.进一步的,所述y轴组件包括两根平行对称布置的y轴支架,每根y轴支架上均固定设置有y轴导轨和y轴齿条,所述x轴组件包括x轴支架;所述y轴动力机构为两组,分别对称设置在两根y轴导轨上并分别与x轴支架的两端连接。
18.进一步的,所述y轴动力机构包括y轴滑座、y轴伺服电机、y轴减速机和y轴齿轮,所述y轴滑座下部与所述y轴导轨接触配合,所述y轴滑座上部与所述x轴支架固定连接,所述y轴伺服电机、y轴减速机和y轴齿轮安装在y轴滑座上,所述y轴伺服电机的主轴前端与y轴减速机的输入端相连,所述y轴齿轮安装在所述y轴减速机的输出轴上,所述y轴齿轮与y轴齿条相啮合。
19.进一步的,所述x轴支架17呈长方形结构,所述长方形结构的两条长边上均固定设置有x轴导轨和x轴齿条,所述z轴动力机构包括z轴滑座,所述x轴动力机构设置在x轴导轨上并与所述z轴滑座连接。
20.进一步的,所述x轴动力机构包括x轴滑座、x轴伺服电机、x轴减速机和x轴齿轮,所述x轴滑座下部与x轴导轨接触配合,所述x轴滑座的中间部分固定连接所述z轴滑座,所述x轴伺服电机、x轴减速器和x轴齿轮安装在x轴滑座上,所述x轴伺服电机的主轴前端与x轴减速机的输入端相连,所述x轴齿轮安装在所述x轴减速机的输出轴上,所述x轴齿轮与x轴齿条相啮合。
21.进一步的,所述z轴组件包括z轴导轨、z轴齿条和z轴支架,所述z轴导轨和z轴齿条固定设置在z轴支架上,所述z轴导轨、z轴齿条和z轴支架位于所述z轴滑座中间开设的导向孔内,并且所述z轴导轨在所述导向孔内与所述z轴滑座接触配合;
22.所述z轴动力机构还包括z轴伺服电机、z轴减速器和z轴齿轮,所述z轴伺服电机、z轴减速器和z轴齿轮安装在z轴滑座上,所述z轴伺服电机的主轴前端与z轴减速机的输入端相连,所述z轴齿轮安装在所述z轴减速机的输出轴上,所述z轴齿轮与z轴齿条相啮合,所述
六轴机械手臂安装在z轴支架的底端。
23.进一步的,所述y轴支架的两端设置有y轴限位器,所述x轴支架的两端设置有x轴限位器,所述z轴支架的两端设置有z轴限位器;所述x轴动力机构、z轴组件、z轴动力机构和六轴机械手臂均为多个。
24.进一步的,所述液压升降单元包括底架和上架,所述底架和上架之间设置有控制所述上架升降的剪叉和液压缸,所述上架顶部设置有台面板。
25.进一步的,所述液压缸连接有液压动力单元,所述液压动力单元包括油箱、油泵、比例阀、电机和液压管。
26.本发明具有以下有益效果:
27.1、本发明具备建造或打印不同尺度(尤其是大尺度)高精度复杂空间模型的能力,通过在六轴机械手臂上换装不同的操作工装,并在桁架机器人的带动下在三维空间内移动,实现模型的建造与打印,同时通过垂直液压升降台的一个或多个液压升降单元实现不同高差的复杂空间的打印。
28.2、本发明具备动态建筑的实时模拟与验证功能,通过垂直液压升降台的一个或多个液压升降单元来实现模拟建筑体块的垂直升降,通过桁架机器人和六轴机械手臂的配合实现模拟建筑体块的横向纵向移动及旋转,以此来模拟动态建筑的实时变化过程,同时通过与各种传感器相配合来验证动态建筑的变化过程以及可动机构的合理性。
29.3、本发明具备实现建筑模型分段建造与组装的功能,可以将建筑分为若干段从而进行分段建造,最后进行组合,可以有利于分段展示;同时本发明可以具备建造模块化建筑的功能,可以建造不同的建筑模块,并通过不同的方式将若干模块组合起来,以此来实现对模块化建筑的模拟与建造。
附图说明
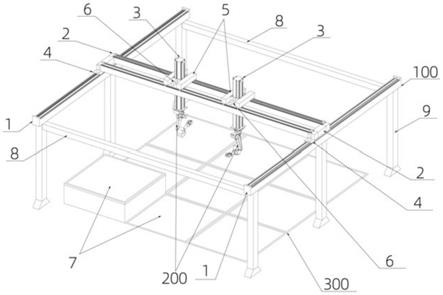
30.图1为本发明的动态建筑实时模拟与验证系统的示意图;
31.图2为桁架机器人的示意图;
32.图3为x轴组件和z轴组件的示意图;
33.图4为y轴组件示意图;
34.图5为液压升降单元的立体图;
35.图6为液压升降单元的主视图;
36.图7为液压升降单元的侧视图。
具体实施方式
37.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
38.本发明实施例提供一种动态建筑实时模拟与验证系统,如图1-7所示,其包括桁架机器人100、六轴机械手臂200和垂直液压升降台300,三者为互相配合,既实现对动态建筑实体和空间可变方式的实时模拟与验证,又实现对动态建筑及其构件模型等产品的建造及打印,具体的:
39.如图1所示,桁架机器人100为一个多轴联动机构,该多轴联动机构包括使得所述
桁架机器人100在x轴、y轴和z轴方向上移动的x轴组件2、y轴组件1和z轴组件3。六轴机械手臂200安装在桁架机器人100上,并且六轴机械手臂200能够在桁架机器人100的带动下在x轴、y轴和z轴方向上移动。
40.垂直液压升降台300安装在桁架机器人100的下方,垂直液压升降台300包括多个(优选数量为9个)正方形的液压升降单元7,垂直液压升降台300能精确的控制每个液压升降单元7的升降高度;多个液压升降单元7组合在一起,既可以每个液压升降单元7单独垂直升降,也可以数个液压升降单元7组合同步垂直升降。
41.六轴机械手臂200配备有操作工装,操作工装包括多种3d打印头、夹爪、钻头、切割头、焊枪和吸盘等。
42.本发明利用桁架机器人100实现六轴机械手臂200在x轴、y轴和z轴方向上移动,定位x、y、z轴移动范围内三维空间中的某一点。六轴机械手臂200像人的手臂一样,有6个关节,每个关节都是用一个伺服电机31与下一个结构连接,靠着六个伺服电机的同时运动,构成了整个六轴机械手臂200的运动,第6轴末端32可以去到空间的每一个xyz空间点,这样就可以在第6轴末端安装上各种操作工装,实现各种功能。操作工装可以是各种3d打印头、夹爪、钻头、切割头、焊枪和吸盘等,用来实现3d打印、抓取放下、空间定点搬运、建造装配零部件或者焊接等功能。
43.上述的六轴机械手臂200、桁架机器人100和垂直液压升降台300具备较高的精度,相互配合实现高精度模型和复杂特殊构造的精确建造与打印,例如,六轴机械手臂200的定位精度在0.05mm以下,重复定位精度小于正负0.06mm。
44.与现有技术相比,本发明具有以下优点:
45.1、本发明具备建造或打印不同尺度(尤其是大尺度)高精度复杂空间模型的能力,通过在六轴机械手臂上换装不同的操作工装,并在桁架机器人的带动下在三维空间内移动,实现模型的建造与打印,同时通过垂直液压升降台的一个或多个液压升降单元实现不同高差的复杂空间的打印。
46.2、本发明具备动态建筑的实时模拟与验证功能,通过垂直液压升降台的一个或多个液压升降单元来实现模拟建筑体块的垂直升降,通过桁架机器人和六轴机械手臂的配合实现模拟建筑体块的横向纵向移动及旋转,以此来模拟动态建筑的实时变化过程,同时通过与各种传感器相配合来验证动态建筑的变化过程以及可动机构的合理性。
47.3、本发明具备实现建筑模型分段建造与组装的功能,可以将建筑分为若干段从而进行分段建造,最后进行组合,可以有利于分段展示;同时本发明可以具备建造模块化建筑的功能,可以建造不同的建筑模块,并通过不同的方式将若干模块组合起来,以此来实现对模块化建筑的模拟与建造。
48.本发明是动态建筑的实时模拟与验证平台,可用于实时模拟动态建筑的运动变化状态,并验证其结构合理性等研究,填补了国内研究的空白;本发明不仅可以实现3d打印建筑主体,也可以通过安装多种打印头与各种材料与供配料3d打印系统相结合,打印出诸如墙体、门、窗等建筑构件,而后通过在机械臂上换装各种夹爪或焊枪进行建筑的安装与建造,体现模块化与装配式的优势,是3d打印与装配式和模块化建筑思想的优势组合;本发明具备高精度与高灵活性,通过各部分的相互配合,可实现大小多种尺度的复杂空间与构造以及高精度模型的建造。
49.发明不限制桁架机器人的具体结构形式,其中一个示例如下:
50.如图1、2所示,桁架机器人100包括x轴组件2、x轴动力机构5、y轴组件1、y轴动力机构4、z轴组件3和z轴动力机构6。
51.y轴动力机构4安装在y轴组件1上,x轴组件2安装在y轴动力机构4上,x轴组件2和y轴动力机构4在y轴动力机构4的驱动下沿y轴运动。
52.x轴动力机构5安装在x轴组件2上,z轴动力机构6安装在x轴动力机构5上,z轴组件3安装在z轴动力机构6上,x轴动力机构5、z轴动力机构6和z轴组件3在x轴动力机构5的驱动下沿x轴运动。
53.六轴机械手臂200安装在z轴组件3上,z轴组件3和六轴机械手臂200在z轴动力机构6的驱动下沿z轴运动,从而实现六轴机械手臂200的三维移动。
54.优选的,六轴机械手臂200安装在z轴组件3下部,通过桁架机器人100的带动实现六轴机械手臂200在三维空间中的多轴向运动,操作工装安装在机械臂第6轴末端部,即可通过抓取、吸附等功能,实现不同尺度动态建筑实体和空间验证模型的升降、平移、旋转等,又可通过打印、焊接等功能实现动态建筑及其构件等试件模型的安装、建造等。
55.其中,如图4所示,y轴组件1包括两根平行对称布置的y轴支架11,每根y轴支架11上均固定设置有y轴导轨12和y轴齿条13,x轴组件2包括x轴支架17;y轴动力机构4为两组,分别对称设置在两根y轴导轨12上并分别与x轴支架17的两端连接,两组y轴动力机构4同步沿y轴导轨12往复移动,控制x轴支架17在y轴方向移动。
56.如图4所示,y轴动力机构4包括y轴滑座14、y轴伺服电机15、y轴减速机16和y轴齿轮,y轴滑座14下部与y轴导轨12接触配合,保证整个y轴动力机构4沿y轴方向移动,y轴滑座14上部与x轴支架17固定连接。
57.y轴伺服电机15、y轴减速机16和y轴齿轮安装在y轴滑座14上,y轴伺服电机15的主轴前端与y轴减速机16的输入端相连,y轴齿轮安装在y轴减速机16的输出轴上,通过y轴齿轮与y轴齿条13的啮合,从而带动y轴动力机构4沿y轴往复移动。
58.如图3所示,x轴支架17呈长方形结构,该长方形结构的两条长边上均固定设置有x轴导轨18和x轴齿条19,z轴动力机构6包括z轴滑座24,x轴动力机构5设置在x轴导轨1上并与z轴滑座24连接,x轴动力机构5控制z轴滑座24在x方向来回移动。
59.如图3所示,x轴动力机构5包括x轴滑座21、x轴伺服电机23、x轴减速机22和x轴齿轮,x轴滑座21下部与x轴导轨18接触配合,保证整个x轴动力机构5沿x轴方向移动。
60.x轴滑座21包括平行间隔设置的两个块状结构,两个块状结构的中间部分固定连接z轴滑座24,x轴伺服电机23、x轴减速器22和x轴齿轮安装在x轴滑座24上,x轴伺服电机23的主轴前端与x轴减速机22的输入端相连,x轴齿轮安装在x轴减速机22的输出轴上,通过x轴齿轮与x轴齿条19的啮合,从而带动x轴动力机构5沿x轴往复移动。
61.如图3所示,z轴组件3包括z轴导轨29、z轴齿条30和z轴支架28,z轴导轨29和z轴齿条30固定设置在z轴支架28上,z轴导轨29、z轴齿条30和z轴支架28位于z轴滑座24中间开设的导向孔内,并且z轴导轨29在导向孔内与z轴滑座24接触配合,保证整个z轴组件3沿z轴方向移动。
62.z轴动力机构6还包括z轴伺服电机25、z轴减速器26和z轴齿轮,z轴伺服电机25、z轴减速器26和z轴齿轮安装在z轴滑座24上,z轴伺服电机25的主轴前端与z轴减速机26的输
入端相连,z轴齿轮安装在z轴减速机26的输出轴上,通过z轴齿轮与z轴齿条30的啮合,从而带动z轴支架28沿z轴往复移动,六轴机械手臂200安装在z轴支架28的底端,从而使得六轴机械手臂200沿z轴往复移动。
63.上述的x、y、z轴组件两端均安装有限制运动超出行程的行程限位器,其中,y轴支架11的两端设置有y轴限位器10,y轴限位器10可以是位于y轴支架11两端的凸起结构或者端盖结构等;x轴支架17的两端设置有x轴限位器20,x轴限位器20可以是位于x轴支架17两端的凸起结构等;z轴支架28的两端设置有z轴限位器27,z轴限位器27可以是位于z轴支架28两端的凸起结构或板状结构等。
64.如图2、4所示,桁架机器人100通过多根支承立柱9固定在地基上,多根支承立柱9设置在y轴支架11的下部,可以支承和固定整个桁架机器人100于基础平面。y轴组件1充当桁架机器人100的固定框架结构,x轴组件2和z轴组件3在各自的动力机构的驱动下在框架上进行移动。为保证固定框架的稳定,y轴组件1的y轴支架11通过两根连接梁8连接加固,并组成一个相对稳固的整体。
65.本发明中,x轴动力机构5、z轴组件3、z轴动力机构6和六轴机械手臂200均可以为多个,优选为2个,2个x轴动力机构5对称设置在x轴导轨18上,且可各自独立沿x轴导轨18来回移动,2个z轴组件3各自的z轴支架28可分别独立的沿z轴方向往复移动,与两个六轴机械手臂200形成两套的手臂结构。
66.多个六轴机械手臂200可以实现独立作业或同步作业,可单独或共同作用于不同尺度动态建筑实体和空间可变方式的模拟与验证,及其建筑与构件的建造或打印,提高作业效率。
67.本发明中额电机均具有“电磁制动器”功能,使电机在断电停机时能实现可靠制动,保证各运动部件(x轴、y轴、z轴)运动时的可靠性、安全性;整个桁架机器人100通过各个轴的电机的运行,实现x轴、y轴和z轴的往复运动,实现点动,连续运动,并可实现定位x、y、z轴移动范围内3维空间中的某一点。
68.本发明的垂直液压升降台300为组合式垂直重载液压升降台,其包括多个液压升降单元7,优选为9个,每个液压升降单元7都由机械系统和液压系统构成。
69.如图5-7所示,液压升降单元7的机械系统包括底架36和上架34,底架34和上架34之间设置有控制上架34升降的剪叉35和液压缸37,上架34顶部设置有台面板33。
70.液压升降单元7的液压系统包括液压缸37、密封圈、液压动力单元38、液压油、液压油管等,液压缸37连接有液压动力单元38,液压动力单元38包括油箱39、油泵、比例阀、电机40和液压管等。
71.整个垂直液压升降台300的液压系统由九台高性能齿轮油泵为系统提供动力源。油缸37内置磁环位移传感器结构,可有效检测油缸37位置,并把采集到的信息以电信号形式传输给plc控制系统,通过plc控制系统的信息比对与调校进行油缸37位置的二次修正,提高油缸37位置控制精度。
72.垂直液压升降台300可实现单个液压升降单元7的升降,也可同步控制9台液压升降单元7升降及远程控制,多台液压升降单元7可实现组合升降,也可实现单个液压升降单元7的各个动作(点动控制,单独升/降等)。
73.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员
来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。