1.本实用新型涉及机器人领域,尤指一种多功能机器人夹具及机器人。
背景技术:
2.随着社会的发展,传统的人工烹饪方式已经无法很好地适应人们快节奏的生活方式,尤其是在客流量较大的快餐店,需要雇佣大量的人工,导致用工成本高。
3.为了降低成本,人们开始使用可自动制作汉堡的机器人,通过机器人自动完成汉堡的制作,以降低用工成本。因机器人在制作汉堡时既需要抓取肉饼,又需要抓取面包和料盒,所以现有的机器人需要设计不同的夹具来夹取不同的物品,不仅需要制作多套夹具,导致成本较高,而且需要机器人不停地切换夹具,效率较低。
技术实现要素:
4.本实用新型的目的是提供一种多功能机器人夹具及机器人,实现一套夹具夹取不同的物品,无需频繁切换夹具,提高操作效率,降低制造成本。
5.本实用新型提供的技术方案如下:
6.一方面,提供一种多功能机器人夹具,包括:
7.安装座;
8.第一夹爪,设置在所述安装座的一端;
9.第二夹爪,设置在所述安装座的另一端;
10.真空吸盘,设置在所述安装座设有所述第二夹爪的一端,且位于所述第二夹爪的外侧。
11.进一步优选地,所述第一夹爪和所述第二夹爪安装于所述安装座的不同高度。
12.进一步优选地,所述安装座包括底板和连接板,所述第一夹爪设置在所述底板的一端,所述连接板的一端与所述底板的另一端连接,所述真空吸盘设置在所述连接板的另一端并位于所述连接板的下方,所述第二夹爪设置在所述连接板的下方。
13.进一步优选地,还包括传感器,所述传感器设置在所述真空吸盘的旁侧。
14.进一步优选地,所述第一夹爪包括第一驱动件和两个第一夹持件,两个所述第一夹持件对称设置且分别与所述第一驱动件连接,通过所述第一驱动件驱动两个所述第一夹持件的开合。
15.进一步优选地,所述第一夹持件的夹持部为弧形片状构件或矩形片状构件。
16.进一步优选地,所述第二夹爪包括第二驱动件和两个第二夹持件,两个所述第二夹持件对称设置且分别与所述第二驱动件连接,通过所述第二驱动件驱动两个所述第二夹持件的开合。
17.进一步优选地,所述第二夹持件的夹持部为内部中空的容器,且所述容器靠近另一所述第二夹持件的侧壁设有开口。
18.进一步优选地,还包括导向件,所述导向件设置在所述容器内且与所述安装座固
定连接。
19.另一方面,还提供一种机器人,包括机械臂和上述任一的多功能机器人夹具,所述多功能机器人夹具通过所述安装座安装在所述机械臂上。
20.本实用新型的技术效果在于:
21.(1)通过设置第一夹爪、第二夹爪和真空吸盘,可通过第一夹取夹取料盒,通过第二夹爪夹取肉饼,通过真空吸盘吸取面包,进而实现一套夹具夹取多个不同形状的物品,无需频繁更换夹具,不仅节省操作时间,提高操作效率,而且无需制作多套夹具,降低制造成本。
22.(2)第一夹爪和第二夹爪在安装座上的高度不同,可缩短第一夹爪与第二夹爪的间距,并使第一夹爪和第二夹爪之间不产生干涉,以缩小多功能机器人夹具的体积。
23.(3)在第二夹持部内设置导向件,可对待夹取物品进行限位,防止第二夹持部夹取物品时物品左右移动,提高夹取的成功率和效率。
附图说明
24.下面结合附图和具体实施方式对本实用新型作进一步详细说明:
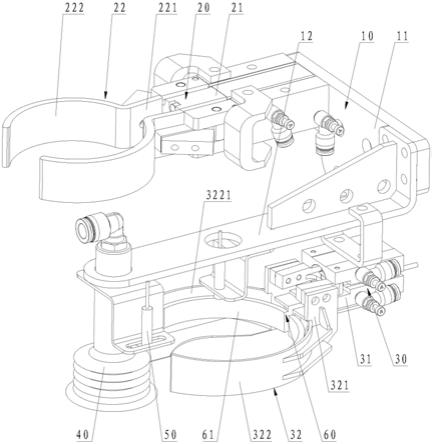
25.图1是本技术具体实施例提供的一种多功能机器人夹具的结构示意图;
26.图2是图1所示的多功能机器人夹具的俯视图。
27.附图标号说明:
28.10、安装座;11、底板;12、连接板;20、第一夹爪;21、第一驱动件;22、第一夹持件;221、第一连接部;222、第一夹持部;30、第二夹爪;31、第二驱动件;32、第二夹持件;321、第二连接部;322、第二夹持部;3221、开口;40、真空吸盘;50、传感器;60、导向件;61、导向部。
具体实施方式
29.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
30.为使图面简洁,各图中只示意性地表示出了与本实用新型相关的部分,它们并不代表其作为产品的实际结构。另外,以使图面简洁便于理解,在有些图中具有相同结构或功能的部件,仅示意性地绘示了其中的一个,或仅标出了其中的一个。在本文中,“一个”不仅表示“仅此一个”,也可以表示“多于一个”的情形。
31.还应当进一步理解,在本技术说明书和所附权利要求书中使用的术语“和/或”是指相关联列出的项中的一个或多个的任何组合以及所有可能组合,并且包括这些组合。
32.在本文中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
33.另外,在本技术的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为
指示或暗示相对重要性。
34.在本实用新型提供的一种多功能机器人夹具的一个实施例中,如图1和图2所示,包括安装座10、第一夹爪20、第二夹爪30和真空吸盘40;多功能机器人夹具可通过安装座10安装在机器人的机械臂上,通过机械臂的运动带动多功能机器人夹具的运动。
35.第一夹爪20设置在安装座10的一端;第二夹爪30设置在安装座10的另一端;真空吸盘40设置在安装座10设有第二夹爪30的一端,且位于第二夹爪30的外侧。
36.第一夹爪20、第二夹爪30和真空吸盘40分别安装在安装座10上,第一夹爪20可用于夹取料盒等物品,第二夹爪30可用于夹取肉饼等物品,真空吸盘40可用于吸取面包等物品。第一夹爪20和第二夹爪30位于安装座10的两端,可防止第一夹爪20或第二夹爪30工作时产生干涉。第一夹爪20和第二夹爪30可根据待夹取物品的形状进行设置。
37.示例性地,如图1所示,第一夹爪20包括第一驱动件21和两个第一夹持件22,两个第一夹持件22对称设置且分别与第一驱动件21连接,通过第一驱动件21驱动两个第一夹持件22的开合。第一驱动件21可为气动手指模块或电动手指模块,第一驱动件21工作时带动两个第一夹持件22相向转动至闭合位置以夹取待夹取物品,或相背转动至打开位置。
38.如图1所示,第一夹持件22包括第一连接部221和第一夹持部222,第一连接部221的一端与第一驱动件21连接,第一连接部221的另一端与第一夹持部222连接,第一夹持件22的第一夹持部222为弧形片状构件或矩形片状构件。第一夹持件22的第一夹持部222可根据所需要夹取的物品形状进行设置,如设置为弧形或矩形等规则形状或其他不规则形状。两个第一夹持件22位于闭合位置时,两个第一夹持部222的内部构成圆形空间或方形空间或其他形状的封闭空间,以夹取料盒等物品。
39.如图1所示,第二夹爪30包括第二驱动件31和两个第二夹持件32,两个第二夹持件32对称设置且分别与第二驱动件31连接,通过第二驱动件31驱动两个第二夹持件32的开合。第二驱动件31可为气动手指模块或电动手指模块,第二驱动件31工作时可驱动两个第二夹持件32相向转动至闭合位置以夹取物品,或相背转动至打开位置。
40.如图1所示,第二夹持件32包括第二连接部321和第二夹持部322,第二夹持部322通过第二连接部321与第二驱动件31连接,第二夹持件32的第二夹持部322为内部中空的容器,且容器靠近另一第二夹持件32的侧壁设有开口3221。第二夹持部322包括上端面、下端面和侧壁,上端面、下端面和侧壁形成一侧开口的容器。第二夹持部322(容器)内部中空,用于容纳肉饼,第二夹持部322(容器)的侧壁开口,第二夹持件32闭合时,肉饼可从第二夹持部322(容器)的开口3221处进入第二夹持部322内。
41.第二夹持部322(容器)的水平截面形状与肉饼匹配,且第二夹持部322内部高度不小于肉饼高度,如肉饼为圆形时,两个第二夹持部322闭合后形成的形状也为圆形,肉饼为矩形时,两个第二夹持部322闭合后形成的形状也为矩形。第二夹持部322的水平截面形状还可以为椭圆形、其他多边形或其他不规则形状。两个第二夹持件32闭合时,两个第二夹持部322之间可完全闭合,也可留有间隙,只需保证第二夹持部322内的肉饼不掉落即可。
42.第二夹持件32夹持肉饼时,先将第二夹持件32的第二夹持部322置于肉饼两侧,然后控制第二夹持件32闭合,在闭合过程中通过第二夹持部322的开口3221将肉饼夹取至两个第二夹持部322构成的扁平盒状容器内。在移动或翻转肉饼的过程中,第二夹持件32保持闭合,通过第二夹持部322的底部拖住肉饼,以防止肉饼掉落。将肉饼移动或翻转至目标位
置时,第二驱动件31控制第二夹持件32打开,将肉饼放置在目标位置。
43.真空吸盘40位于第二夹爪30外侧,为避免真空吸盘40吸附面包时,面包与第二夹爪30产生干涉,真空吸盘40的底部可沿第二夹爪30的高度方向延伸至第二夹爪30的外部,使吸附的面包位于第二夹爪30的下方,进而避免面包与第二夹爪30产生干涉。
44.工作时,机械臂工作带动多功能机器人夹具移动到面包放置处,通过真空吸盘40吸取面包,并将面包放置在操作区,然后机械臂工作带动多功能机器人夹具移动到肉饼放置区,通过第二夹爪30夹取肉饼,并将肉饼放置在操作区的面包上,最后机械臂带动多功能机器人夹具移动到料盒放置区,通过第一夹爪20夹取番茄酱等料盒,并通过机器人上的其他机械手完成番茄酱的添加。
45.本实施例的多功能机器人夹具也可以先通过第一夹爪20夹取料盒,通过第二夹爪30夹取肉饼,通过真空吸盘40吸取面包后,再将面包和肉饼一起放置在操作台上,并通过机器人上的其他机械手完成调料的添加。本实施例对多功能机器人夹具夹取物品的步骤顺序不作限定,具体操作顺序可根据实际使用需求进行设置。
46.在一些实施方式中,如图1所示,为避免真空吸盘40未吸附到面包,真空吸盘40的旁侧还设有传感器50,该传感器50可为光电传感器,通过光电传感器检测真空吸盘40是否有吸附住面包,以避免漏吸。
47.在一些实施方式中,如图1所示,第一夹爪20和第二夹爪30安装于安装座10的不同高度,即第一夹爪20在安装座10上的投影与第二夹爪30在安装座10上的投影位于安装座10的不同高度上。通过将第一夹爪20和第二夹爪30安装于安装座10的不同高度,可缩短第一夹爪20与第二夹爪30的间距,并使第一夹爪20和第二夹爪30之间不产生干涉,以缩小多功能机器人夹具的体积。
48.在一些实施方式中,如图1所示,安装座10包括底板11和连接板12,第一夹爪20设置在底板11的一端,连接板12的一端与底板11的另一端连接,真空吸盘40设置在连接板12的另一端并位于连接板12的下方,第二夹爪30设置在连接板12的下方。
49.连接板12为l形,连接板12的短边与底板11连接,第二夹爪30安装在连接板12长边的下方,以使第一夹爪20和第二夹爪30位于底板11的不同高度。真空吸盘40安装在连接板12的下方,且真空吸盘40的底部到连接板12的距离大于第二夹爪30的底部到连接板12的距离,使真空吸盘40吸附面包后,面包不会与第二夹爪30产生干涉,且真空吸盘40与第二夹爪30的水平间距无需设置的过大,以缩小多功能机器人夹具的体积。
50.在一些实施方式中,如图1和图2所示,还包括导向件60,导向件60设置在容器(第二夹持部322)内且与安装座10固定连接。每个第二夹持部322内均设有一个导向件60,导向件60与安装座10固定连接,第二夹持件32打开或闭合时,导向件60保持不动,用于在夹取肉饼时限制肉饼移动。
51.导向件60包括导向部61和第三连接部,导向部61通过第三连接部与安装座10固定连接,导向部61为弧形薄片或方形薄片,导向部61的形状与第二夹持部322的形状相适配,以使导向部61可放置在第二夹持部322内。夹持肉饼时,第二夹持部322打开,导向件60不动,第二夹持件32移动到肉饼放置处时,使第二夹持部322的下端面与放置肉饼的台面贴合,且导向件60的导向部61位于肉饼的两侧,通过导向部61对肉饼进行限位,以防止肉饼左右移动,然后第二夹持部322闭合,第二夹持部322的下端面铲取肉饼,使肉饼顺利进入第二
夹持部322内,完成肉饼的夹取。
52.本实施方式中,通过设置导向件60,可防止夹取肉饼时,肉饼左右移动,以使肉饼可顺利进入第二夹持部322内,此外,在第二夹持部322内,导向件60的导向部61也可对肉饼进行限位,并可防止肉饼粘连在第二夹持部322的侧壁上。
53.本实用新型还提供一种机器人的实施例,如图1和图2所示,包括机械臂和上述任一实施方式的多功能机器人夹具,多功能机器人夹具通过安装座10安装在机械臂上。机械臂带动多功能机器人夹具的移动,多功能机器人夹具通过第一夹爪20、第二夹爪30和真空吸盘40夹取所需的物品,可实现自动夹取料盒、肉饼和面包等,无需频繁切换夹具,不仅节省操作时间,提高操作效率,而且无需制作多套夹具,降低制造成本。
54.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。