具有可选择的末端止动件的低成本电动缝合器
1.相关申请的交叉引用
2.本技术要求2020年8月14日提交的美国临时专利申请第63/065,601号的权益和优先权。前述申请中的全部内容都以引用的方式并入本文中。
技术领域
3.本公开涉及电动外科缝合器。更具体地,本公开涉及手持式电动机械外科缝合器,其被配置成与不同长度的可卸式一次性或可再用装载单元一起使用,所述装载单元具有用户可选择的距离设置。
背景技术:
4.电动外科缝合器利用一个或多个电动机来致动具有砧座和钉仓的各种机械末端执行器。缝合式末端执行器可包括可再用装载单元和/或一次性装载单元,其具有各种尺寸并且以一种或多种配置(例如,多列)布置的钉。
5.装载单元具有一个末端止动件,它是所有钉都已击发的指示。电动外科缝合器中利用对末端止动件的快速检测来防止损坏设备。在外科手术过程中,缝合器可以通过测量电动机的各种操作参数(例如,扭矩或电流)来检测末端执行器组件中的末端止动件。然而,这种方法依赖于复杂的软件算法,其开发和实施成本高昂。此外,如果未正确地检测末端止动件,则当电动机继续运行时,各种移动部件很可能在到达末端止动件时发生碰撞,从而可能导致设备损坏。除了可能损坏设备之外,达到机械限位还可能导致装载单元内发生抽动或不必要的夹钳运动,这会对设备在击发时的准确性和效率产生负面影响,并可能随着时间的推移造成越来越大的损坏。
6.因此,需要一种能够避免达到机械限位的负面影响的低成本电动机械缝合器,而无需基于扭矩或电动机电流的任何昂贵的软件算法。
技术实现要素:
7.本公开提供一种外科电动缝合器,其具有用户可设置的末端止动件距离,所述外科电动缝合器配置有电动机,所述电动机致动缝合器末端执行器移动与用户可选距离设置相关的预定距离。
8.根据本公开的一个实施例,公开了一种外科缝合器。外科缝合器包括装载单元,所述装载单元具有:具有仓距离(cartridge distance)和多个钉的钉仓以及在击发时形成多个钉的砧座。外科缝合器还包括耦接到装载单元的轴组件。轴组件包括可在轴组件内纵向移动并配置成致动装载单元的驱动轴。外科缝合器进一步包括手柄组件,其具有电源和耦接到所述电源并配置成纵向移动所述驱动轴的电动机。手柄组件还包括距离设置界面,其包括多个开关,所述开关中的每一者对应于所述电动机移动所述驱动轴的行进距离,所述行进距离对应于所述仓距离。
9.根据上述实施例的一个方面,距离设置界面包括滑动切换件,所述滑动切换件被
配置成在限定在手柄组件的外壳中的狭缝内移动。滑动切换件被配置成接合多个开关中的每一者。
10.根据上述实施例的另一方面,其中多个开关中的每个开关包括响应于对应开关的接合而被启动的光源。多个开关中的每个开关都是可在致动时从解锁状态移动到锁定状态的可锁定按钮开关。外科缝合器还包括控制器,所述控制器耦接到距离设置界面并被配置为重置致动开关的锁定状态。多个开关中的第一开关被配置成在第一模式下操作电动机。多个开关中的第二开关被配置成在第二模式下操作电动机。在第一模式期间,电动机被配置成纵向移动驱动轴直至达到机械限位。在第二模式期间,电动机被配置成纵向移动驱动轴直到达到行进距离。
11.根据上述实施例的另一方面,公开了用于控制外科缝合器的方法。所述方法包括将装载单元耦接到轴组件,所述装载单元包括具有仓距离和多个钉的钉仓和在击发时形成所述多个钉的砧座。所述方法还包括启动安置在手柄组件上的多个开关中的一个开关,及响应于所述开关的启动来设置对应于所述仓距离的行进距离。所述方法进一步包括启动安置在手柄组件内的电动机以将驱动轴纵向移动行进距离以致动装载单元。
12.根据上述实施例的一个方面,设置行进距离包括滑动切换件,所述滑动切换件被配置成在限定在手柄组件的外壳中的狭缝内移动。滑动切换件被配置成接合多个开关中的每一者。所述方法进一步包括启动与被启动的开关相关联的光源。
13.根据上述实施例的另一方面,多个开关中的每个开关是可在致动时从未锁定状态移动到锁定状态的可锁定按钮开关。所述方法进一步包括重置致动开关的锁定状态。所述方法还包括启动多个开关中的第一开关以在第一模式下操作电动机和启动多个开关中的第二开关以在第二模式下操作电动机。所述方法还包括在第一模式期间纵向移动驱动轴直至达到机械限位和在第二模式期间纵向移动驱动轴直至达到行进距离。
附图说明
14.下文参考附图在本文中描述公开的包括主动末端止动件选择机制的外科缝合设备的各个方面,其中:
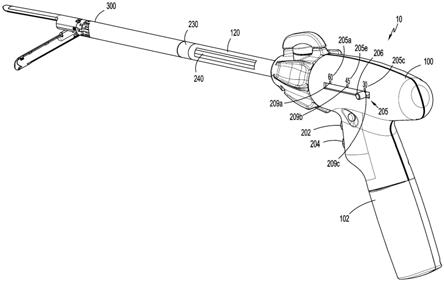
15.图1是根据本公开的实施例的电动外科器械的透视图;
16.图2是根据本公开的实施例的与图1的电动外科缝合器一起使用的装载单元的透视图;
17.图3是根据本公开的实施例的图2的装载单元的透视分解图;
18.图4是根据本公开的实施例的图1的外科器械的示意图;
19.图5是根据本公开的另一实施例的图1的外科器械的手柄组件的透视图;以及
20.图6是根据本公开的又一实施例的图1的外科器械的手柄组件的透视图。
具体实施方式
21.参考附图详细描述了所公开的电动外科缝合器,在附图中,类似附图标记在若干视图中的每个视图中表示相同或对应的元件。然而,应理解,本文所描述的本公开的方面仅仅是本公开的示例,并且可以以各种形式实施。为了避免出现不必要的细节混淆本公开,未对众所周知的功能或构造进行详细描述。因此,本文所公开的特定结构和功能细节不应被
解释为限制性的,而是只应被解释为权利要求书的基础,和用于教示所属领域的技术人员用实际上任何适当的详细结构以不同方式使用本公开的代表性基础。
22.在本说明书中,术语“近侧”通常用于指代设备以其惯用方式使用期间更接近临床医生的设备的部分,而术语“远侧”通常用于指代装置以其惯用方式使用期间距离临床医生较远的设备的部分。另外,术语“内窥镜”通常用于指内窥镜、腹腔镜、关节镜和/或通过小直径切口或套管进行的任何其它手术。另外,术语“临床医生”通常用于指代医务人员,包括医生、护士和辅助人员。
23.本文描述的系统可以利用一个或多个控制器来接收各种信息并且变换接收的信息以生成输出。控制器可以包括任何类型的计算设备、计算电路、或能够执行存储在存储器中的一系列指令的任何类型的处理器或处理电路。控制器可包括多个处理器和/或多核中央处理单元(cpu),并且可包括任何类型的处理器,例如微处理器、数字信号处理器、微控制器等等。控制器还可包括用以存储数据和/或算法以执行一系列指令的存储器。
24.本文中所描述的方法、程序、算法或代码中的任一个可包含在一个或多个机器可读媒体或存储器上。术语“存储器”可包括以由例如处理器、计算机或数字处理设备等机器可读的形式提供(例如,存储和/或传送)信息的机制。举例来说,存储器可包括只读存储器(rom)、随机存取存储器(ram)、磁盘存储媒体、光学存储媒体、快闪存储器设备,或任何其它易失性或非易失性存储器存储设备。其上含有的代码或指令可由载波信号、红外信号、数字信号和其它类似信号表示。
25.首先参考图1,根据本公开的公开内容的方面的电动机械、手持式、电动外科缝合器被示出并且总体上被指定为10。电动外科缝合器10包括手柄组件100,所述手柄组件被配置成经由轴组件120选择性地附接到多个不同的装载单元300,每个装载单元被配置成由手柄组件100致动和操纵。轴组件120包括配置成连接到装载单元300并容纳驱动轴240的远侧耦接器230。驱动轴240可在轴组件120内纵向移动。
26.手柄组件100可被配置成与轴组件200选择性连接,并且轴组件120继而被配置成与装载单元300选择性连接。手柄组件100包括手柄外壳102,所述手柄外壳容纳下面关于图4描述的各种部件,如被配置成致动装载单元300的电动机、驱动轴和/或齿轮部件。
27.参考图2和3,装载单元300包括具有砧座组件306和仓组件308的末端执行器304。装载单元300的驱动组件360包括具有固定到驱动梁365的远侧端的柔性驱动轴364和近侧端接合部分368,所述近侧端接合部分被配置成当装载单元300附接到轴组件120的远侧耦接器230时,耦接到轴组件120的驱动轴240(图1)。
28.当驱动组件360在装载单元300内向远侧推进时,驱动梁365的上梁在砧座板312和砧座盖310之间限定的通道内移动并且下梁在钉仓305的通道内移动并越过载体316的外表面以闭合末端执行器304并从其发射钉。
29.装载单元300的近侧主体部分302包括包围上部外壳部分301a和下部外壳部分301b的护套或外管301。外壳部分301a和301b包围具有从装载单元300的近侧端延伸的钩状近侧端366a的铰接连杆366。当装载单元300固定到轴组件120的远侧外壳232时,铰接连杆366的带钩近侧端366a接合轴组件120的耦接钩(未图示)。当轴组件120的驱动杆(未图示)如上所述前进或缩回时,装载单元300的铰接连杆366在装载单元300内推进或缩回以相对于近侧主体部分302的远侧端枢转末端执行器304。
30.末端执行器304的仓组件308包括可支撑在载体316中的钉仓305。钉仓305限定中心纵向狭槽305a,并且三直线列的钉保持狭槽305b定位在纵向狭槽305a的每一侧上。钉保持狭槽305b中的每一者接收单个钉307和钉推动器309的一部分。在电动外科缝合器10的操作期间,驱动组件360邻接致动滑板350并且推动致动滑板350通过仓305。当致动滑板移动通过仓305时,致动滑板350的凸轮楔连续地接合钉推进器309以在钉保持狭槽305b内垂直移动钉推进器309并且连续地从所述钉保持狭槽中弹出钉307以抵靠砧座板312形成。
31.参考图4,电动外科缝合器10包括电动机164,其可以是被配置成致动一个或多个驱动轴240的任何电动电动机。电动机164耦接到电池156,所述电池可以是dc电池(例如,可充电铅基电池、镍基电池、锂离子基电池等)、ac/dc变压器或任何其它适合用于向电动机164提供电能的电源。
32.电池156和电动机164耦接到安置在电路板154上的电动机驱动电路404,所述电动机驱动电路控制电动机164的操作,包括使电能从电池156流动到电动机164。驱动电路404可包括多个传感器408a、408b、...408n,其被配置成测量电动机164和电池156的操作状态。传感器408a-n可包括电压传感器、电流传感器、温度传感器、遥测传感器、光学传感器及其组合。传感器408a至408n可测量由电池156供应的电能的电压、电流和其它电学性质。传感器408a至408n还可测量电动机164的旋转速度(如每分钟转数(rpm))、扭矩、温度、电流汲取和其它操作性质。rpm可以通过测量电动机164的旋转来确定。还可通过使用安置于轴中或接近轴安置的各种线性传感器来确定驱动轴240的位置,或者从rpm测量值外推所述位置。在实施例中,可以基于在恒定rpm下电动机164的经调节电流汲取来计算扭矩。在其它实施例中,驱动电路404和/或控制器406可以测量时间且处理随时间而变的上文所描述的值,包括积分和/或差分,例如以确定测得值的变化等等。
33.驱动电路404还耦接到控制器406,所述控制器可以是适于执行计算和/或根据下面进一步详细描述的一组指令进行操作的任何合适的逻辑控制电路。控制器406可包括可操作地连接到存储器的中央处理单元,所述存储器可以包括暂时性类型的存储器(例如,ram)和/或非暂时性类型的存储器(例如,快闪介质、磁盘介质等)。控制器406包括用于与驱动电路404接口连接的多个输入和输出。具体来说,控制器406从电动器电路404接收关于电动机164和电池156的操作状态测得的传感器信号,且接着将控制信号输出到电动机电路404以基于传感器读数和特定算法指令(其在下文更详细地论述)控制电动机164的操作。控制器406还被配置成从用户界面(例如,耦接到控制器406的按钮202和204、距离设置界面205等)接受多个用户输入。
34.参考图1,电动外科缝合器10包括一对按钮202和204,所述按钮被配置成启动电动机164以在纵向上分别向远侧和近侧方向操作驱动轴240。当按钮202被按下时,电动机164在第一方向上操作,例如顺时针旋转,驱动轴240向远侧移动,装载单元300的驱动组件360也与驱动梁365一起向远侧方向移动。这继而使砧座组件306向仓组件308移动并同时弹出钉307以将移向仓组件308的砧座组件306之间所夹持的组织夹住、缝合和切割。按下按钮204使电动机164反转并且电动机164在第二方向上操作,例如逆时针旋转。驱动轴240被撤回,并向近侧移动,这使驱动组件360缩回并使砧座组件306远离仓组件308移动。
35.末端执行器304可以具有任何合适的尺寸,例如30mm、45mm和60mm,并且设置界面205包括用于配置可与电动外科缝合器10一起使用的每个末端执行器304的距离的选项。参
考图1,电动外科缝合器10包括距离设置界面205,所述界面具有滑动切换件206和多个开关205a、205b、205c,每个开关与驱动梁365在击发期间前进的预定行进距离相关联,即,30mm、45mm和60mm。开关205a、205b、205c可以是按钮开关或限位开关,使得当滑动切换件206在狭缝210内移动时,滑动切换件206致动对应于所要距离的开关205a、205b、205c。狭缝210限定在手柄组件100的外壳102内。每个开关208a、208b、208b产生对应于距离的距离信号。所要距离信号被传送到控制器406或直接传送到电动机164,所述电动机然后被设置以基于距离信号旋转对应的转数,从而达到选定的距离。圈数被预编程到控制器406或驱动电路404中,因此无需依赖来自传感器408a至408n的反馈来控制驱动组件360的移动。
36.一旦装载单元300耦接到轴组件120,则用户通过移动滑动切换件206以接合对应的开关205a、205b、205c来输入对应于末端执行器304的尺寸的行进距离。如果按下了不正确的开关,则用户可以将切换件移动到所需位置。滑动切换件206的位置可由对应于开关205a、205b、205c中的每一者的灯209a、209b、209c指示。一旦设置了距离,用户按下按钮202,则电动机164在第一方向上操作,例如顺时针旋转预定圈数以达到选定距离。电动机164致动末端执行器304以将移向仓组件308的砧座组件306之间所夹持的组织夹住、缝合和切割。此后,用户按下按钮204,从而使电动机164向相反的方向操作相同的圈数以缩回驱动组件360并使砧座组件306远离仓组件308移动。
37.距离设置界面225的另一实施例在图5中示出,其中开关225a、225b、225c中的每一者是按钮开关,它们由用户手动切换,而不是通过滑动切换件206。开关225a、225b、225c可以在按钮内结合灯以指示它们的切换状态。在其它实施例中,开关225a、225b、225c可以是闩锁开关,其在被切换后保持在按下状态。在被切换之后,用户然后通过按下按钮202和204来关闭和打开末端执行器304来操作电动外科缝合器10。在移除装载单元300之后,重置开关225a、225b、225c的切换开关。
38.距离设置界面235的另一实施例在图6中示出。距离设置界面235类似于距离设置界面225并且包括按钮切换开关235a和235b,每一者都与电动机164的不同行进距离设置相关联。开关235a和235b还可以包括光指示器并且可以是如上所述的可锁定的、可重置的开关。在实施例中,开关235a启动电动机164以在第一模式下操作,所述第一模式可用于对肥胖症或一般用途,在此期间连续操作电动机164直到电动机164达到机械限位并停转。开关235b启动电动机164以在第二模式下操作,在此期间操作电动机164进行预定距离,类似于距离设置界面205和225的距离模式。
39.本领域技术人员将理解,在本文具体描述并在附图中示出的装置和方法是非限制性的示例性实施例。设想,在不脱离本公开的范围的情况下,结合一个示例性实施例说明或描述的元件和特征可以与另一个的元件和特征组合。同样,本领域技术人员也将基于上述实施例理解本公开的其它特征和优点。因此,除了由所附权利要求指示之外,本公开不受已经特别示出和描述的内容的限制。