1.本实用新型涉及康复设备技术领域,具体涉及一种具有平躺辅助功能的轮椅。
背景技术:
2.人口老龄化加深是社会发展趋势,是全世界都在面临的难题。随着高龄和失能老人数量不断攀升,辅助老年人日常生活的设备需求越来越大,以轮椅为代表的移动类辅助设备给老年人的出行带来了极大便利。按照世界卫生组织的轮椅需求估算,2050年全球将有超过4.5亿人需要轮椅,但现阶段普通轮椅在舒适、安全、多功能和经济方面的特性都还难以满足人民需求,有待进一步提高。
3.轮椅作为一种助老助残的代步工具,极大的方便了老弱残障人士的出行,但普通的轮椅的功能往往比较单一,无法满足使用者的个性化需求,如普通的轮椅往往只有坐姿一种姿势,长时间的坐立会使得使用者的臀部肌肉长期受压迫而导致血液循环受阻,而如果使用者坐立一定时间后能够适时的平躺一下,则可以大大缓解轮椅使用者臀部的压力,进而大大提高使用者使用轮椅的舒适性。
4.为了解决上述技术问题,公开号为cn204655317u的实用新型专利中就公开了一种具有翻身功能的站立平躺式轮椅,包括轮椅车架、站立机构、翻身机构、平躺机构、行驶机构、控制机构,所述平躺机构包括收腿电机、起背电机、托腿架、连杆、托脚架,托腿架和连杆分别与托脚架和轮椅车架转动连接,形成平行四边形机构,托脚机构中的收腿电机一端与轮椅车架转动连接,另一端与托腿架转动连接,起背机构中的起背电机分别与靠背轴和起背电机固定架转动连接,起背电机固定架与坐垫架固定,靠背轴与坐垫架转动连接。上述轮椅可以通过起背机构中的起背电机和托脚机构中的收腿电机协同实现平躺的功能,但该轮椅在实现平躺辅助功能时需要两个电机的协同工作,由于轮椅的使用者多半是老弱残障人士,因此轮椅的使用成本和使用便利性对他们来说就尤为重要,而上述轮椅在实现平躺辅助功能时需要两个电机的协同工作,这样一方面两个电机的使用无疑会大大增加轮椅的使用成本,另一方面也增加了轮椅操作的繁琐性,因此上述轮椅不能够很好的满足老弱残障人士的使用需求。
技术实现要素:
5.针对现有技术存在的上述不足,本实用新型要解决的技术问题是:如何提供一种使用成本低,操作方便,且能在坐姿和平躺状态任意切换以更好的满足使用者使用需求的具有平躺辅助功能的轮椅。
6.为了解决上述技术问题,本实用新型采用如下技术方案:
7.具有平躺辅助功能的轮椅,包括轮椅架体,还包括对应于人体背部用以提供支撑的背部靠架、对应于人体小腿部和足部用以提供支撑的脚部靠架以及用以提供平躺辅助功能的平躺机构,所述背部靠架与所述轮椅架体转动连接,以使得所述背部靠架能够绕所述轮椅架体转动以实现平躺辅助功能,所述平躺机构包括平躺驱动组件、以及在所述平躺驱
动组件的水平驱动作用下能够运动的平躺连杆组件,所述平躺连杆组件还分别与所述背部靠架和所述脚部靠架连接,以使得所述平躺连杆组件能够在所述平躺驱动组件的驱动作用下带动所述背部靠架和所述脚部靠架同步沿相同方向绕所述轮椅架体转动。
8.在本方案中,以人体坐在轮椅上时的方向作为参考方向,即本方案中的前、后、左、右、上、下分别对应为人体坐在轮椅上时的前、后、左、右、上、下,同时本方案中的轴向为左右方向,竖向为上下方向,纵向为前后方向。
9.本实用新型的工作原理是:本方案的轮椅在需要由坐姿状态转变为平躺状态时,利用平躺驱动组件的向后侧伸出的水平运动来驱动平躺连杆组件运动,平躺连杆组件运动的同时还将同时带动背部靠架和脚部靠架沿相同方向绕轮椅架体转动,如在由坐姿状态转变为平躺状态时,背部靠架在平躺连杆组件的带动下将绕轮椅架体顺时针转动,此时脚部靠架也将绕轮椅架体顺时针转动,由于背部靠架和腿部靠近的初始状态不一样,故此时背部靠近将绕轮椅架体顺时针向下转动,而脚部靠架将绕轮椅架体顺时针向上转动,直到背部靠架和脚部靠架转动到与轮椅架体基本处于同一平面上,此时轮椅完成由坐姿状态到平躺状态的转变,使用者可以在轮椅上实现平躺的效果。
10.同理,当轮椅需要由平躺状态转变为坐姿状态时,利用平躺驱动组件向前侧复位的水平运动来驱动平躺连杆组件运动,平躺连杆组件运动的同时还将同时带动背部靠架和脚部靠架沿相同方向绕轮椅架体转动,此时,背部靠架在平躺连杆组件的带动下将绕轮椅架体逆时针转动,此时脚部靠架也将绕轮椅架体逆时针转动,由于背部靠架和腿部靠近的初始状态不一样,故此时背部靠近将绕轮椅架体逆时针向上转动,而脚部靠架将绕轮椅架体逆时针向下转动,直到背部靠架和脚部靠架转动基本处于竖直状态,此时轮椅完成由平躺状态到坐姿状态的转变。
11.综上,本方案利用平躺驱动组件的水平运动来带动平躺连杆组件的运动,平躺连杆组件的运动再同步带动背部靠架和脚部靠架同方向绕轮椅架体转动,由此就可以实现一个平躺驱动组件同时完成对背部靠架和脚部靠架的驱动效果,因此本方案利用一个驱动组件就可以控制轮椅在坐姿状态和平躺状态的转变,与现有技术中需要两个驱动组件协同工作的方式相比,本方案由于减少了驱动组件的数量,使用成本大大降低,同时操作也更加的方便。
12.优选的,在所述背部靠架用于与所述轮椅架体连接的位置设有第一连接管,在所述第一连接管沿纵向方向的后端凸出设有第一连接部,在所述轮椅架体用于与所述背部靠架连接的位置设有第二连接管,在所述第二连接管沿纵向方向的后端凸出设有第二连接部,所述第一连接部和所述第二连接部之间通过背部转动件进行转动连接,且坐姿状态下,所述第一连接部沿纵向方向的前端面与对应位置所述第二连接部的端面之间呈3-6
°
的角度设置,且该角度的顶点位于所述背部转动件的轴线上。
13.这样,背部靠架与轮椅架体之间通过第一连接部和第二连接部之间的背部转动件进行转动连接,且第一连接部沿纵向方向的前端面与第二连接部的端面之间呈3-6
°
的小角度设置,这样可以对背部靠架绕轮椅架体向前转动的角度进行限位,同时又不影响背部靠架绕轮椅架体向后转动的角度,且通过对背部靠架绕轮椅架体向前转动的角度进行限位,可以使得背部靠架在由平躺状态转变为坐姿状态时进行准确复位,同时还可以避免背部靠架转变为坐姿状态时转动角度过大导致的背部靠架过于前倾造成的使用不舒适的问题。
14.优选的,所述平躺连杆组件包括第一平躺连杆和第二平躺连杆,所述第一平躺连杆的一端与所述平躺驱动组件转动连接,所述第一平躺连杆远离其连接所述平躺驱动组件的一端向上延伸并与所述第二平躺连杆转动连接,所述第二平躺连杆远离其连接所述第一平躺连杆的一端与对应位置的所述背部靠架固定连接,在所述第一平躺连杆的轴向两侧还对称设有第三平躺连杆,所述第三平躺连杆的一端与对应位置的所述背部靠架固定连接,所述第三平躺连杆远离其连接所述背部靠架的一端向下延伸并转动连接由第四平躺连杆,所述第四平躺连杆远离其连接所述第三平躺连杆的一端向下延伸并转动连接有第五平躺连杆,所述第五平躺连杆远离其连接所述第四平躺连杆的一端沿纵向方向水平向前延伸并转动连接有第六平躺连杆,所述第六平躺连杆远离其连接所述第五平躺连杆的一端沿纵向方向向前延伸并与对应位置的所述脚部靠架转动连接。
15.这样,当需要轮椅由坐姿状态变为平躺状态时,平躺驱动组件向后侧水平推出,使得第一平躺连杆的下端跟随平躺驱动组件向后侧移动,此时第一平躺连杆的另一端带动第二平躺连杆的对应端沿逆时针方向向下转动,此时第二平躺连杆与背部靠架连接的一端将带动背部靠架沿顺时针方向向下转动,此时背部靠架以背部转动件为中心绕轮椅架体顺时针向下转动,背部靠架沿顺时针向下转动的同时还将带动第三平躺连杆的对应端顺时针向下转动,第三平躺连杆远离其连接背部靠架的一端将带动第四平躺连杆逆时针向下转动,第四平躺连杆远离其连接所述第三平躺连杆的一端带动对应位置的第五平躺连杆沿纵向方向向后移动,此时第五平躺连杆连接第六平躺连杆的一端也将带动对应位置的第六平躺连杆沿纵向方向向后移动,第六平躺连杆远离其连接第五平躺连杆的一端逆时针向下转动,此时与第六平躺连杆连接的脚部靠架顺时针向上转动,当脚部靠架和背部靠架基本转动到与轮椅架体为同一平面的位置时,平躺驱动组件停止向后侧移动,此时轮椅完成由坐姿状态到平躺状态的转变,且在轮椅由坐姿状态到平躺状态的转变过程中,背部靠架和脚部靠架均同方向转动,即都是顺时针方向转动。
16.当轮椅需要由平躺状态转变为坐姿状态时,平躺驱动组件向前侧水平收缩复位,使得第一平躺连杆的下端跟随平躺驱动组件向前侧移动,此时第一平躺连杆的另一端带动第二平躺连杆的对应端沿顺时针方向向上转动,此时第二平躺连杆与背部靠架连接的一端将带动背部靠架沿逆时针方向向上转动,此时背部靠架以背部转动件为中心绕轮椅架体逆时针向上转动,背部靠架沿逆时针向上转动的同时还将带动第三平躺连杆的对应端逆时针向上转动,第三平躺连杆远离其连接背部靠架的一端将带动第四平躺连杆顺时针向上转动,第四平躺连杆远离其连接第三平躺连杆的一端带动对应位置的第五平躺连杆沿纵向方向向前移动,此时第五平躺连杆连接第六平躺连杆的一端也将带动对应位置的第六平躺连杆沿纵向方向向前移动,第六平躺连杆远离其连接第五平躺连杆的一端顺时针向上转动,此时与第六平躺连杆连接的脚部靠架逆时针向下转动,当脚部靠架和背部靠架基本转动竖直状态时,平躺驱动组件向前收缩复位,此时轮椅完成由平躺状态到坐姿状态的转变,且在轮椅由平躺状态到坐姿状态的转变过程中,背部靠架和脚部靠架均同方向转动,即都是逆时针方向转动,同时,当轮椅由平躺状态转变为坐姿状态时,由于第一连接部和第二连接部沿纵向方向的前端面仅有3-6
°
的角度间隙,故可以限制背部靠架的进一步转动,使得背部靠架准确复位,避免了背部靠架转变为坐姿状态时转动角度过大导致的背部靠架过于前倾造成的使用不舒适的问题。
17.优选的,在所述轮椅架体上与所述第五平躺连杆对应的位置还沿纵向方向设有导向滑块,在所述导向滑块上开设有沿纵向贯穿所述导向滑块的导向滑槽,所述第五平躺连杆滑动连接在对应位置的所述导向滑块的导向滑槽内,以通过所述导向滑槽对所述第五平躺连杆的移动进行导向限位。
18.这样,通过设置导向滑块和导向滑槽,并将第五平躺连杆滑动连接在导向滑槽内,利用导向滑槽可以对第五平躺连杆的移动进行限位导向,使得第五平躺连杆始终按既定的路线移动,由于第五平躺连杆需要将背部靠架一侧的运动传递到脚部靠架的一侧,故第五平躺连杆需要始终按既定路线移动,这样才能保证背部靠架和脚部靠架两者运动的一致性,进而保证轮椅由坐姿状态转变为平躺状态时的效果。
19.优选的,所述第二平躺连杆与对应位置所述背部靠架之间的夹角为8-15
°
,且所述第二平躺连杆的长度为150-200mm。
20.这样,为了使平躺驱动组件有限的行程范围内确保背部靠架转动足够的角度,需要对第二平躺连杆的长度及其与背部靠架之间的夹角进行限制,且在第二平躺连杆与背部靠架之间的夹角一定的情况下,第二平躺连杆的长度越长,则背部靠架转动相同角度需要的平躺驱动组件的行程就越长,同时综合考虑背部靠架与脚部靠架的联动性等因素,最终确定出第二平躺连杆与背部靠架的夹角为8-15
°
,而第二平躺连杆的长度为150-200mm。
21.优选的,所述第三平躺连杆与对应位置所述背部靠架之间的夹角为40-50
°
,且所述第三平躺连杆的长度为50-70mm。
22.这样,根据实验可以知道,当第三平躺连杆与背部靠架之间的夹角一定时,第三平躺连杆的长度会影响到使得脚部靠架转动相同角度需要的第五平躺连杆的行程,通过综合考虑各因素,最终确定第三平躺连杆与背部靠架之间的夹角为40-50
°
,且第三平躺连杆的长度为50-70mm。
23.优选的,所述脚部靠架包括固定连接的脚底踏板和靠腿板,在靠腿板的轴向两侧分别固定连接有靠腿杆件,所述第六平躺连杆远离其连接所述第五平躺连杆的一端转动连接在对应位置的所述靠腿杆件上。
24.这样,通过设置脚底踏板和靠腿板,方便人体腿部位置的放置,人体在使用轮椅时,脚部可以放置在脚底踏板上,而小腿位置可以靠在靠腿板上,由此可以提高轮椅使用时的舒适性。
25.优选的,在所述靠腿板用于与人体小腿接触的端面呈与人体小腿相适应的弧形结构,在所述靠腿板用于与人体小腿接触的端面上还设有柔性材料制成的腿部靠垫,所述腿部靠垫整体呈与人体小腿相适应的弧形结构。
26.这样,通过在靠腿板上设置柔性材料制成的腿部靠垫,且腿部靠垫整体呈与人体小腿相适应的弧形结构,腿部靠垫可以对人体的小腿位置进行支撑,由此可以进一步提高轮椅使用的舒适性。
27.优选的,在所述靠腿板的轴向两侧还对称设有护腿组件,所述护腿组件包括轴向设置的腿宽调节片,所述腿宽调节片的一端与对应位置的所述靠腿板连接,所述腿宽调节片的另一端转动连接有护腿调节片,所述护腿调节片远离其连接所述腿宽调节片的一端沿纵向方向向前延伸并连接有护腿连接片,所述护腿连接片远离其连接所述护腿调节片的一端转动连接有护腿横板,所述护腿横板上设有腿垫。
28.这样,腿宽调节片和护腿调节片转动连接,护腿连接片和护腿横板转动连接,可以通过转动的方式来适应不同人体的小腿尺寸,从而进一步提高轮椅使用的舒适性。
29.优选的,所述腿宽调节片上沿轴向方向分布有多组腿宽调节孔,在所述靠腿板上与所述腿宽调节片对应的位置开设有腿宽安装孔,所述腿宽安装孔能够与不同位置的所述腿宽调节孔对应,且所述腿宽安装孔与对应位置的所述腿宽调节孔通过腿宽调节螺钉进行固定连接;
30.在所述护腿调节片上沿其长度方向设有多个护腿调节孔,在所述护腿连接片上设有护腿安装孔,所述护腿安装孔能够与不同位置的所述护腿调节孔对应,且所述护腿安装孔与对应位置的所述护腿调节孔通过护腿调节螺钉进行固定连接。
31.这样,腿宽调节片上的不同位置的腿宽调节孔与靠腿板上的腿宽安装孔进行对应,护腿调节片上的不同位置的护腿调节孔与护腿安装孔进行对应,可以进一步通过上述尺寸的调节老使用不同人体的小腿尺寸,进而更好的满足不同使用者的使用需求。
附图说明
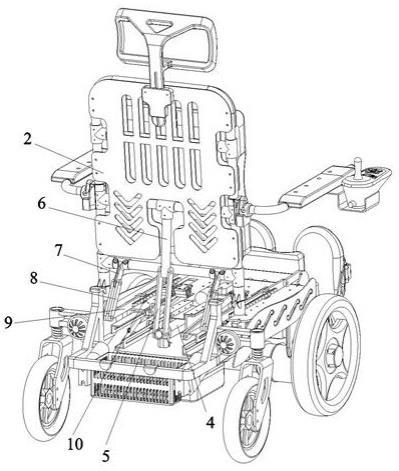
32.图1为本实用新型具有平躺辅助功能的轮椅的结构示意图;
33.图2为本实用新型具有平躺辅助功能的轮椅的后侧示意图(隐藏部分轮椅架体结构);
34.图3为本实用新型具有平躺辅助功能的轮椅的前侧示意图(隐藏部分轮椅架体结构);
35.图4为图3中a处的放大示意图;
36.图5为本实用新型具有平躺辅助功能的轮椅中平躺机构的机构简图;
37.图6为本实用新型具有平躺辅助功能的轮椅姿态转换进程图(隐藏部分轮椅架体结构);
38.图7为本实用新型具有平躺辅助功能的轮椅中脚部靠架的后侧结构示意图;
39.图8为本实用新型具有平躺辅助功能的轮椅中脚部靠架的前侧结构示意图。
40.附图标记说明:轮椅架体1、背部靠架2、脚部靠架3、靠腿板301、脚底踏板302、腿宽调节片303、护腿调节片304、护腿连接片305、合页306、腿垫307、护腿横板308、腿部靠垫309、平躺驱动组件4、第一平躺连杆5、第二平躺连杆6、第三平躺连杆7、第四平躺连杆8、第五平躺连杆9、导向滑块10、第六平躺连杆11、第一连接管12、第一连接部121、第二连接管13、第二连接部131、背部转动件14。
具体实施方式
41.下面将结合附图及实施例对本实用新型作进一步说明。
42.如附图1和附图2所示,具有平躺辅助功能的轮椅,包括轮椅架体1,还包括对应于人体背部用以提供支撑的背部靠架2、对应于人体小腿部和足部用以提供支撑的脚部靠架3以及用以提供平躺辅助功能的平躺机构,背部靠架2与轮椅架体1转动连接,以使得背部靠架2能够绕轮椅架体1转动以实现平躺辅助功能,平躺机构包括平躺驱动组件4、以及在平躺驱动组件4的水平驱动作用下能够运动的平躺连杆组件,平躺连杆组件还分别与背部靠架2和脚部靠架3连接,以使得平躺连杆组件能够在平躺驱动组件4的驱动作用下带动背部靠架
2和脚部靠架3同步沿相同方向绕轮椅架体1转动。
43.在本方案中,以人体坐在轮椅上时的方向作为参考方向,即本方案中的前、后、左、右、上、下分别对应为人体坐在轮椅上时的前、后、左、右、上、下,同时本方案中的轴向为左右方向,竖向为上下方向,纵向为前后方向。
44.本实用新型的工作原理是:本方案的轮椅在需要由坐姿状态转变为平躺状态时,利用平躺驱动组件4的向后侧伸出的水平运动来驱动平躺连杆组件运动,平躺连杆组件运动的同时还将同时带动背部靠架2和脚部靠架3沿相同方向绕轮椅架体1转动,如在由坐姿状态转变为平躺状态时,背部靠架2在平躺连杆组件的带动下将绕轮椅架体1顺时针转动,此时脚部靠架3也将绕轮椅架体1顺时针转动,由于背部靠架2和腿部靠近的初始状态不一样,故此时背部靠近将绕轮椅架体1顺时针向下转动,而脚部靠架3将绕轮椅架体1顺时针向上转动,直到背部靠架2和脚部靠架3转动到与轮椅架体1基本处于同一平面上,此时轮椅完成由坐姿状态到平躺状态的转变,使用者可以在轮椅上实现平躺的效果。
45.同理,当轮椅需要由平躺状态转变为坐姿状态时,利用平躺驱动组件4向前侧复位的水平运动来驱动平躺连杆组件运动,平躺连杆组件运动的同时还将同时带动背部靠架2和脚部靠架3沿相同方向绕轮椅架体1转动,此时,背部靠架2在平躺连杆组件的带动下将绕轮椅架体1逆时针转动,此时脚部靠架3也将绕轮椅架体1逆时针转动,由于背部靠架2和腿部靠近的初始状态不一样,故此时背部靠近将绕轮椅架体1逆时针向上转动,而脚部靠架3将绕轮椅架体1逆时针向下转动,直到背部靠架2和脚部靠架3转动基本处于竖直状态,此时轮椅完成由平躺状态到坐姿状态的转变。
46.综上,本方案利用平躺驱动组件4的水平运动来带动平躺连杆组件的运动,平躺连杆组件的运动再同步带动背部靠架2和脚部靠架3同方向绕轮椅架体1转动,由此就可以实现一个平躺驱动组件4同时完成对背部靠架2和脚部靠架3的驱动效果,因此本方案利用一个驱动组件就可以控制轮椅在坐姿状态和平躺状态的转变,与现有技术中需要两个驱动组件协同工作的方式相比,本方案由于减少了驱动组件的数量,使用成本大大降低,同时操作也更加的方便。
47.如附图3和附图4所示,在本实施例中,在背部靠架2用于与轮椅架体1连接的位置设有第一连接管12,在第一连接管12沿纵向方向的后端凸出设有第一连接部121,在轮椅架体1用于与背部靠架2连接的位置设有第二连接管13,在第二连接管13沿纵向方向的后端凸出设有第二连接部131,第一连接部121和第二连接部131之间通过背部转动件14进行转动连接,且坐姿状态下,第一连接部121沿纵向方向的前端面与对应位置第二连接部131的端面之间呈3-6
°
的角度设置,且该角度的顶点位于背部转动件14的轴线上。
48.这样,背部靠架2与轮椅架体1之间通过第一连接部121和第二连接部131之间的背部转动件14进行转动连接,且第一连接部121沿纵向方向的前端面与第二连接部131的端面之间呈3-6
°
的小角度设置,这样可以对背部靠架2绕轮椅架体1向前转动的角度进行限位,同时又不影响背部靠架2绕轮椅架体1向后转动的角度,且通过对背部靠架2绕轮椅架体1向前转动的角度进行限位,可以使得背部靠架2在由平躺状态转变为坐姿状态时进行准确复位,同时还可以避免背部靠架2转变为坐姿状态时转动角度过大导致的背部靠架2过于前倾造成的使用不舒适的问题。
49.在本实施例中,平躺连杆组件包括第一平躺连杆5和第二平躺连杆6,第一平躺连
杆5的一端与平躺驱动组件4转动连接,第一平躺连杆5远离其连接平躺驱动组件4的一端向上延伸并与第二平躺连杆6转动连接,第二平躺连杆6远离其连接第一平躺连杆5的一端与对应位置的背部靠架2固定连接,在第一平躺连杆5的轴向两侧还对称设有第三平躺连杆7,第三平躺连杆7的一端与对应位置的背部靠架2固定连接,第三平躺连杆7远离其连接背部靠架2的一端向下延伸并转动连接由第四平躺连杆8,第四平躺连杆8远离其连接第三平躺连杆7的一端向下延伸并转动连接有第五平躺连杆9,第五平躺连杆9远离其连接第四平躺连杆8的一端沿纵向方向水平向前延伸并转动连接有第六平躺连杆11,第六平躺连杆11远离其连接第五平躺连杆9的一端沿纵向方向向前延伸并与对应位置的脚部靠架3转动连接。
50.本方案的平躺机构的机构简图如附图5所示,这样,当需要轮椅由坐姿状态变为平躺状态时,平躺驱动组件4(附图5中的c段)向后侧水平推出,使得第一平躺连杆5(附图5中的b段)的下端跟随平躺驱动组件4向后侧移动,此时第一平躺连杆5的另一端带动第二平躺连杆6(附图5中的j段)的对应端沿逆时针方向向下转动,此时第二平躺连杆6与背部靠架2(附图5中的a段)连接的一端将带动背部靠架2沿顺时针方向向下转动,此时背部靠架2以背部转动件14(附图5中的h段)为中心绕轮椅架体1顺时针向下转动,背部靠架2沿顺时针向下转动的同时还将带动第三平躺连杆7(附图5中的k段)的对应端顺时针向下转动,第三平躺连杆7远离其连接背部靠架2的一端将带动第四平躺连杆8(附图5中的d段)逆时针向下转动,第四平躺连杆8远离其连接第三平躺连杆7的一端带动对应位置的第五平躺连杆9(附图5中的e段)沿纵向方向向后移动,此时第五平躺连杆9连接第六平躺连杆11(附图5中的f段)的一端也将带动对应位置的第六平躺连杆11沿纵向方向向后移动,第六平躺连杆11远离其连接第五平躺连杆9的一端逆时针向下转动,此时与第六平躺连杆11连接的脚部靠架3(附图5中的g段)顺时针向上转动,当脚部靠架3和背部靠架2基本转动到与轮椅架体1为同一平面的位置时,平躺驱动组件4停止向后侧移动,此时轮椅完成由坐姿状态到平躺状态的转变,且在轮椅由坐姿状态到平躺状态的转变过程中,背部靠架2和脚部靠架3均同方向转动,即都是顺时针方向转动。具体轮椅由坐姿状态转变为平躺状态的过程图如附图6中的(a)、(b)、(c)、(d)顺序所示。
51.当轮椅需要由平躺状态转变为坐姿状态时,平躺驱动组件4(附图5中的c段)向前侧水平收缩复位,使得第一平躺连杆5(附图5中的b段)的下端跟随平躺驱动组件4向前侧移动,此时第一平躺连杆5的另一端带动第二平躺连杆6(附图5中的j段)的对应端沿顺时针方向向上转动,此时第二平躺连杆6与背部靠架2(附图5中的a段)连接的一端将带动背部靠架2沿逆时针方向向上转动,此时背部靠架2以背部转动件14(附图5中的h段)为中心绕轮椅架体1逆时针向上转动,背部靠架2沿逆时针向上转动的同时还将带动第三平躺连杆7(附图5中的k段)的对应端逆时针向上转动,第三平躺连杆7远离其连接背部靠架2的一端将带动第四平躺连杆8(附图5中的d段)顺时针向上转动,第四平躺连杆8远离其连接第三平躺连杆7的一端带动对应位置的第五平躺连杆9(附图5中的e段)沿纵向方向向前移动,此时第五平躺连杆9连接第六平躺连杆11(附图5中的f段)的一端也将带动对应位置的第六平躺连杆11沿纵向方向向前移动,第六平躺连杆11远离其连接第五平躺连杆9的一端顺时针向上转动,此时与第六平躺连杆11连接的脚部靠架3(附图5中的g段)逆时针向下转动,当脚部靠架3和背部靠架2基本转动竖直状态时,平躺驱动组件4向前收缩复位,此时轮椅完成由平躺状态到坐姿状态的转变,且在轮椅由平躺状态到坐姿状态的转变过程中,背部靠架2和脚部靠架
3均同方向转动,即都是逆时针方向转动,同时,当轮椅由平躺状态转变为坐姿状态时,由于第一连接部121和第二连接部131沿纵向方向的前端面仅有3-6
°
的角度间隙,故可以限制背部靠架2的进一步转动,使得背部靠架2准确复位,避免了背部靠架2转变为坐姿状态时转动角度过大导致的背部靠架2过于前倾造成的使用不舒适的问题。
52.在本实施例中,在轮椅架体1上与第五平躺连杆9对应的位置还沿纵向方向设有导向滑块10,在导向滑块10上开设有沿纵向贯穿导向滑块10的导向滑槽,第五平躺连杆9滑动连接在对应位置的导向滑块10的导向滑槽内,以通过导向滑槽对第五平躺连杆9的移动进行导向限位。
53.这样,通过设置导向滑块10和导向滑槽,并将第五平躺连杆9滑动连接在导向滑槽内,利用导向滑槽可以对第五平躺连杆9的移动进行限位导向,使得第五平躺连杆9始终按既定的路线移动,由于第五平躺连杆9需要将背部靠架2一侧的运动传递到脚部靠架3的一侧,故第五平躺连杆9需要始终按既定路线移动,这样才能保证背部靠架2和脚部靠架3两者运动的一致性,进而保证轮椅由坐姿状态转变为平躺状态时的效果。
54.在本实施例中,第二平躺连杆6与对应位置背部靠架2之间的夹角为8-15
°
,且第二平躺连杆6的长度为150-200mm。
55.这样,为了使平躺驱动组件4有限的行程范围内确保背部靠架2转动足够的角度,需要对第二平躺连杆6的长度及其与背部靠架2之间的夹角进行限制,且在第二平躺连杆6与背部靠架2之间的夹角一定的情况下,第二平躺连杆6的长度越长,则背部靠架2转动相同角度需要的平躺驱动组件4的行程就越长,同时综合考虑背部靠架2与脚部靠架3的联动性等因素,最终确定出第二平躺连杆6与背部靠架2的夹角为8-15
°
,而第二平躺连杆6的长度为150-200mm。
56.在本实施例中,第三平躺连杆7与对应位置背部靠架2之间的夹角为40-50
°
,且第三平躺连杆7的长度为50-70mm。
57.这样,根据实验可以知道,当第三平躺连杆7与背部靠架2之间的夹角一定时,第三平躺连杆7的长度会影响到使得脚部靠架3转动相同角度需要的第五平躺连杆9的行程,通过综合考虑各因素,最终确定第三平躺连杆7与背部靠架2之间的夹角为40-50
°
,且第三平躺连杆7的长度为50-70mm。
58.如附图7和附图8所示,在本实施例中,脚部靠架3包括固定连接的脚底踏板302和靠腿板301,在靠腿板301的轴向两侧分别固定连接有靠腿杆件,第六平躺连杆11远离其连接第五平躺连杆9的一端转动连接在对应位置的靠腿杆件上。
59.这样,通过设置脚底踏板302和靠腿板301,方便人体腿部位置的放置,人体在使用轮椅时,脚部可以放置在脚底踏板302上,而小腿位置可以靠在靠腿板301上,由此可以提高轮椅使用时的舒适性。
60.在本实施例中,在靠腿板301用于与人体小腿接触的端面呈与人体小腿相适应的弧形结构,在靠腿板301用于与人体小腿接触的端面上还设有柔性材料制成的腿部靠垫309,腿部靠垫309整体呈与人体小腿相适应的弧形结构。
61.这样,通过在靠腿板301上设置柔性材料制成的腿部靠垫309,且腿部靠垫309整体呈与人体小腿相适应的弧形结构,腿部靠垫309可以对人体的小腿位置进行支撑,由此可以进一步提高轮椅使用的舒适性。
62.在本实施例中,在靠腿板301的轴向两侧还对称设有护腿组件,护腿组件包括轴向设置的腿宽调节片303,腿宽调节片303的一端与对应位置的靠腿板301连接,腿宽调节片303的另一端转动连接有护腿调节片304,护腿调节片304远离其连接腿宽调节片303的一端沿纵向方向向前延伸并连接有护腿连接片305,护腿连接片305远离其连接护腿调节片304的一端转动连接有护腿横板308,护腿横板308上设有腿垫307。
63.这样,腿宽调节片303和护腿调节片304转动连接,护腿连接片305和护腿横板308转动连接,可以通过转动的方式来适应不同人体的小腿尺寸,从而进一步提高轮椅使用的舒适性。
64.在本实施例中,腿宽调节片303上沿轴向方向分布有多组腿宽调节孔,在靠腿板301上与腿宽调节片303对应的位置开设有腿宽安装孔,腿宽安装孔能够与不同位置的腿宽调节孔对应,且腿宽安装孔与对应位置的腿宽调节孔通过腿宽调节螺钉进行固定连接;
65.在护腿调节片304上沿其长度方向设有多个护腿调节孔,在护腿连接片305上设有护腿安装孔,护腿安装孔能够与不同位置的护腿调节孔对应,且护腿安装孔与对应位置的护腿调节孔通过护腿调节螺钉进行固定连接。
66.这样,腿宽调节片303上的不同位置的腿宽调节孔与靠腿板301上的腿宽安装孔进行对应,护腿调节片304上的不同位置的护腿调节孔与护腿安装孔进行对应,可以进一步通过上述尺寸的调节老使用不同人体的小腿尺寸,进而更好的满足不同使用者的使用需求。
67.在本实施例中,脚踏底板上设有脚踏减重孔,且脚踏底板采用2mm厚的铝合金材料制成,护腿连接片305和护腿横板308之间采用合页306进行转动连接,腿宽调节片303与护腿调节片304之间也采用合页306进行转动连接;
68.平躺驱动组件4采用电动推杆,且电动推杆的行程为250mm,以满足轮椅平躺的行程要求,且电动推杆的推力为1300n,电动推杆的电机功率为30w,运行速度为7mm/s。
69.最后需要说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本实用新型的权利要求范围当中。