1.本实用新型涉及康复设备技术领域,具体涉及一种多功能轮椅。
背景技术:
2.人口老龄化加深是社会发展趋势,是全世界都在面临的难题。随着高龄和失能老人数量不断攀升,辅助老年人日常生活的设备需求越来越大,以轮椅为代表的移动类辅助设备给老年人的出行带来了极大便利。按照世界卫生组织的轮椅需求估算,2050年全球将有超过4.5亿人需要轮椅,但现阶段普通轮椅在舒适、安全、多功能和经济方面的特性都还难以满足人民需求,有待进一步提高。
3.轮椅作为一种助老助残的代步工具,极大的方便了老弱残障人士的出行,但普通的轮椅的功能往往比较单一,无法满足使用者的个性化需求,如当轮椅的使用者需要从轮椅上移动到车上或床上时,往往需要外人搀扶着先从轮椅上起来,然后再缓慢的移动到车上或床上,这样就使得使用者往往无法自行完成从轮椅上到车上或床上的过程;又如普通的轮椅往往只有坐姿一种姿势,长时间的坐立会使得使用者的臀部肌肉长期受压迫而导致血液循环受阻,而如果使用者坐立一定时间后能够适时的平躺一下,则可以大大缓解轮椅使用者臀部的压力,进而大大提高使用者使用轮椅的舒适性;另外当坐在轮椅上的人需要站立起来时,由于轮椅的使用者多是行动不便的老弱病残人士,因此当他们需要从轮椅上起立时,往往需要旁人进行搀扶,因此这类轮椅无法满足轮椅上的人自行进行站立的需求。
技术实现要素:
4.针对现有技术存在的上述不足,本实用新型要解决的技术问题是:如何提供一种能够辅助使用者进行上下床、能够实现坐姿和平躺状态的转换,且能够辅助使用者进行站立的多功能轮椅。
5.为了解决上述技术问题,本实用新型采用如下技术方案:
6.一种多功能轮椅,包括轮椅底盘、轮椅架体、对应于人体背部用以提供支撑的背部靠架、以及对应于人体小腿部和足部用以提供支撑的脚部靠架,还包括用以提供上下辅助功能的辅助上下机构、用以提供平躺辅助功能的平躺机构、以及用以提供辅助升降与站立功能的辅助升降站立机构,所述轮椅架体上滑动连接有移动板,所述辅助上下机构能够驱动所述移动板沿所述轮椅架体滑动,以使得所述移动板靠近或远离车床处,所述平躺机构能够带动所述背部靠架和所述脚部靠架绕所述轮椅架体同向转动,以使得轮椅转动到坐姿状态或平躺状态,所述辅助升降站立机构在轮椅为平躺状态时能够带动所述轮椅架体、所述背部靠架和所述脚部靠架共同绕所述轮椅底盘转动,以使得轮椅转动到辅助站立状态。
7.在本方案中,以人体坐在轮椅上时的方向作为参考方向,即本方案中的前、后、左、右、上、下分别对应为人体坐在轮椅上时的前、后、左、右、上、下,同时本方案中的轴向为左右方向,竖向为上下方向,纵向为前后方向;同时,本方案中的坐姿状态为人体平时坐在轮椅上时的轮椅的状态,平躺状态为人体平躺在轮椅上时的轮椅的状态,辅助站立状态为轮
椅辅助人体完全站立时的轮椅的状态,抬升状态为轮椅辅助站立过程中轮椅架体开始绕轮椅底盘转动时的轮椅的状态,坐姿状态也为本方案轮椅使用的初始状态。
8.本实用新型的工作原理是:本方案的轮椅在使用时,当使用者需要从轮椅上移动到车上或床上时,辅助上下机构驱动移动板沿轮椅架体向靠近车床的位置移动,以此来辅助使用者从轮椅上移动到车上或床上;当使用者需要由坐姿状态转换为平躺状态时,平躺机构带动背部靠架和脚部靠架绕轮椅架体同向顺时针转动,使得背部靠架和脚部靠架沿轮椅架体同步转动到基本水平的状态,此时轮椅由坐姿状态转换为平躺状态,当使用者需要由平躺状态转换为坐姿状态时,平躺机构带动背部靠架和脚部靠架绕轮椅架体同向逆时针转动,使得背部靠架和脚部靠架沿轮椅架体同步转动到基本竖直的状态,此时轮椅由平躺状态转换为坐姿状态;当使用者需要从轮椅上进行站立时,首先轮椅在平躺机构的作用下转换为平躺状态,然后辅助升降站立机构再带动轮椅架体、背部靠架和脚部靠架共同绕轮椅底盘逆时针转动,直到轮椅架体、背部靠架和脚部靠架基本转动到竖向状态,此时轮椅为辅助站立状态,并辅助使用者进行站立。
9.综上,本方案利用辅助上下机构来辅助使用者从轮椅上到车上或床上进行移动,利用平躺机构实现轮椅坐姿状态和平躺状态的转换,同时利用辅助升降站立机构来辅助使用者从轮椅上进行站立,因此,本方案能够辅助使用者进行上下床、能够实现坐姿和平躺状态的转换,且能够辅助使用者进行站立。
10.优选的,在所述背部靠架的轴向两侧还分别设有扶手,在所述背部靠架与所述扶手连接的位置设有滑台连接件,在所述扶手与所述背部靠架连接的位置设有凸轮连接件,所述凸轮连接件与所述滑台连接件转动连接,且在所述滑台连接件上还设有滑台限位部,所述凸轮连接件沿纵向方向的后侧在初始状态下与所述滑台限位部相抵。
11.这样,为了满足辅助上下机构辅助使用者进行上下车床的功能,扶手需要能够绕背部靠架转动,同时又需要对扶手的转动角度进行限制,因此在本方案中,扶手和背部靠架之间通过凸轮连接剪和滑台连接件进行转动连接,同时通过在滑台连接件上设置滑台限位部,并使得凸轮连接件沿纵向方向的后侧在初始状态下与限位滑台部相抵,利用限位滑台部可以实现对凸轮连接件转动角度的限制。
12.优选的,所述轮椅底盘的轴向两侧设有灯带装饰条,且在所述轮椅底盘纵向的两侧还分别设有前照灯和车尾灯,在所述轮椅底盘纵向方向的后侧还设有用于放置物品的载物框;
13.所述轮椅底盘沿纵向方向的两侧还分别设有驱动轮和从动轮,且所述驱动轮位于所述轮椅底盘沿纵向方向的前侧,所述从动轮位于所述轮椅底盘沿纵向方向的后侧,所述驱动轮的半径大于所述从动轮的半径。
14.这样,由于本方案的轮椅在辅助上下车时,其工作场所会是在户外,且此时轮椅处于静止状态,如是在夜晚或大雾天气,易发生交通意外,本方案通过在轮椅底盘的轴向两侧设置灯带装饰带,并在轮椅底盘的前后两侧分别设置前照灯和车尾灯,可以保证轮椅在户外场合使用的安全性,同时还起到了美化轮椅的效果。
15.另外,由于本方案具有辅助站立的功能,在轮椅辅助站立时轮椅的重心会发生偏移,进而容易发生倾斜,因此本方案将驱动轮前置,并且使得驱动轮的半径大于从动轮的半径,因此来提高轮椅辅助站立使用过程中的稳定性能。
16.优选的,所述移动板上还竖向转动连接有翻转板,所述翻转板上设有坐垫,且所述翻转板在所述移动板正向移动时能够沿同一方向绕所述移动板竖向上转动;
17.所述辅助上下机构还包括辅助导向组件,所述辅助导向组件包括设置在所述轮椅架体上的导向块、以及设置在所述翻转板上并能够沿所述导向块移动的导向件,所述导向件在沿所述导向块正向移动时能够带动所述翻转板沿同一方向绕所述移动板竖向上转动。
18.这样,辅助上下机构在辅助使用者从轮椅上移动到车上或床上时,当移动板带动翻转板和坐垫同步向靠近车或床方向正向移动的同时,翻转板还将沿同一方向绕移动板竖向上转动,从而使得翻转板在正向移动过程中向靠近车或床发生轻微的翻转,这样就会使得正向移动过程中坐垫也会出现轻微的翻转的现象,坐垫的轻微翻转会给予坐垫上的使用者一个移动到车或床上的辅助作用力,在该辅助作用力的作用下,使得坐垫上的使用者能够自行的完成从轮椅上到车上或床上的过程。
19.另外,通过设置辅助导向组件,利用辅助导向组件对翻转板的移动和转动进行导向,当移动板带动翻转板沿轮椅架体移动时,翻转板上的导向件将沿导向块滑动,从而利用导向件沿导向块的滑动来对翻转板的移动以及绕移动板的转动进行导向,使得正向移动时,翻转板能够沿同一方向绕移动板竖向上转动,以达到翻转板轻微翻转给予使用者一个辅助作用力的目的。
20.优选的,所述导向块在所述移动板的正向移动方向上整体呈先向上弯曲再向下弯曲的弧形结构,在所述导向块上还开设有弧形结构的导向槽,所述导向件能够沿弧形结构的所述导向槽移动,以使得所述翻转板正向移动时能够先绕所述移动板竖向上转动再绕所述移动板竖向下转动复位。
21.这样,导向块在移动板的正向移动方向上整体呈先向上弯曲再向下弯曲的弧形结构,而导向件则沿导向块上的弧形结构的导向槽滑动,这样当移动板正向移动时,导向件也将沿导向槽滑动,在移动板正向移动过程的过程中,由于导向块是先向上弯曲再向下弯曲的结构,故导向件在沿导向槽滑动时,导向件在移动到导向块弧形结构的向上弯曲部分时,导向件的上端将会带动翻转板绕移动板竖向上转动为轻微的翻转状态,由此翻转板可以为使用者上床或上车提供一定的辅助作用力,当使用者从轮椅上移动到车上或床上上,此时导向件将移动到导向块弧形结构的向下弯曲部分,此时导向件的上端带动翻转板绕移动板竖向下转动并复位到初始状态。由此,本方案利用弧形结构的导向块和导向件的配合,就可以实现翻转板正向移动过程中绕移动板竖向上转动为使用者提供辅助作用力的目的,同时翻转板在完成助力效果后将自动进行复位。
22.优选的,所述导向件包括上抬升推杆和下抬升推杆,所述上抬升推杆固定连接在所述翻转板上,所述下抬升推杆能够沿所述导向槽滑动,所述上抬升推杆和所述下抬升推杆通过第一纵向连接件进行转动连接,在所述上抬升推杆上还设有推杆限位部,所述推杆限位部在所述翻转板正向移动时能够始终与对应位置的所述下抬升推杆相抵,以限制正向移动时所述上抬升推杆和所述下抬升推杆之间的相对转动,且在所述翻转板反向移动时所述下抬升推杆能够绕所述上抬升推杆相对转动。
23.这样,通过设置上抬升推杆和下抬升推杆,且上抬升推杆和下抬升推杆之间只能进行单方向的转动;当移动板正向移动时,上抬升推杆的推杆限位部始终与对应位置的下抬升推杆相抵,这样就使得上抬升推杆和下抬升推杆之间不会相对转动,此时,由于导向块
整体呈先向上弯曲再向下弯曲的弧形结构,当下抬升推杆沿导向块移动时,其移动到导向块向上弯曲部分时将因导向块的向上抬升而带动翻转板绕移动板竖向上转动呈轻微翻转的状态,进而为使用者上车或上床提供辅助作用力,当使用者从轮椅上移动到车上或床上后,此时下抬升推杆将移动到导向块弧形结构的向下弯曲部分,此时下抬升推杆带动翻转板绕移动板竖向下转动并复位到初始状态。
24.当使用者从床上或车上重新回到轮椅上时,移动板先正向移动到靠近车或床的位置,然后使用者从车上或床上移动到坐垫上,此时辅助驱动组件带动移动板反向移动,在移动板反向移动过程中,由于下抬升推杆此时能够绕上抬升推杆相对转动,这样就会使得下抬升推杆在沿导向块的弧形结构反向移动的过程中,在人体重力和构件之间的相互约束作用下,下抬升推杆通过绕上抬升推杆的相对转动来消除导向块弧形结构的高度变化对翻转板产生的影响,即此时翻转板在反向移动过程中将不会绕移动板转动而发生翻转现象,这样就可以确保使用者平稳的回到轮椅上,保证了整体回程的平稳性。
25.同时,根据运动轨迹的分析可知,辅助上下机构的进程运动轨迹与导向块的轮廓曲线基本一致,因此,在实际使用时,需要改变机构的运动轨迹时只需要修改导向块的表面轮廓曲线即可,当导向块的轨迹表现为先上升后下降的形式时,翻转板相应的动作也为先顺时针翻转抬升助力,后逆时针翻转回到初始位置的形式,同时,机构的反向移动回程轨迹为一条直线,因此在回程时可平稳的辅助使用者下车或床并回到轮椅上。
26.优选的,在所述轮椅底盘上设有沿纵向方向设置的第一导向杆,所述第一导向杆上沿其长度方向开设有第一导向槽,在所述轮椅架体上转动连接有沿纵向方向设置的第二导向杆,所述第二导向杆上沿其长度方向开设有第二导向槽;
27.所述辅助升降站立机构包括站立驱动组件和站立连杆组件,所述站立连杆组件包括第一站立连杆和第二站立连杆,所述第一站立连杆的一端滑动连接在所述第一导向杆的所述第一导向槽内,所述第一站立连杆远离其连接所述第一导向槽的一端向上延伸并与对应位置的所述第二导向杆转动连接,所述第二站立连杆的一端转动连接在所述轮椅底盘上,所述第二站立连杆远离其连接所述轮椅底盘的一端向上延伸并滑动连接在所述第二导向杆的第二导向槽内,所述第一站立连杆和所述第二站立连杆的中部转动连接以形成剪叉结构,在所述第二站立连杆与所述第二导向槽滑动连接处还转动连接有第三站立连杆,且所述站立驱动组件的驱动端也转动连接在所述第二站立连杆和所述第三站立连杆的转动连接处,所述第三站立连杆远离其连接所述第二站立连杆的一端沿纵向方向向后延伸并转动连接有第四站立连杆,所述第四站立连杆远离其连接所述第三站立连杆的一端向上延伸并与对应位置的所述轮椅架体转动连接。
28.这样,本方案在进行辅助站立时,轮椅先在平躺机构的作用下由坐姿状态转变为平躺状态,然后站立驱动组件的驱动端伸长,站立驱动组件的驱动端伸长时将同时带动对应位置的第二站立连杆和第三站立连杆的对应端沿第二导向槽沿纵向方向向前滑动,此时,第二站立连杆绕其与第一站立连杆的转动连接点逆时针转动,第一站立连杆与第一导向槽滑动连接的一端沿第一导向槽沿纵向方向向前移动,且第一站立连杆和第二站立连杆形成的剪叉结构还将在竖向方向向上移动,从而使得整个轮椅架体和背部靠架向上移动;另一方面,第三站立连杆的沿第二导向槽向前滑动时,第三站立连杆与第四站立连杆连接的一端也将向前移动,从而使得第四站立连杆与轮椅架体连接的一端向上移动的同时还将
绕顺时针方向转动,此时轮椅架体将在第四站立连杆的作用下绕其与第二导向杆的连接位置逆时针方向转动,由此,轮椅架体和背部靠架就实现了一边上升一边逆时针转动的效果,直到轮椅架体和背部靠架基本转动到竖直位置,此时轮椅为辅助站立状态,完成对轮椅上人体的辅助站立的效果。同时通过实际使用发现,本方案结构的轮椅在辅助站立过程中,随着轮椅整体高度的不断升高,其转动的速度逐渐变缓,此运动特征也符合辅助站立时的要求。
29.当轮椅需要由辅助站立状态向坐姿状态转换时,站立驱动组件的驱动端收缩,站立驱动组件的驱动端收缩时将同时带动对应位置的第二站立连杆和第三站立连杆的对应端沿第二导向槽沿纵向方向向后滑动,此时,第二站立连杆绕其与第一站立连杆的转动连接点顺时针转动,第一站立连杆与第一导向槽滑动连接的一端沿第一导向槽沿纵向方向向后移动,且第一站立连杆和第二站立连杆形成的剪叉结构还将在竖向方向向下移动,从而使得整个轮椅架体和背部靠架向下移动;另一方面,第三站立连杆的沿第二导向槽向后滑动时,第三站立连杆与第四站立连杆连接的一端也将向后移动,从而使得第四站立连杆与轮椅架体连接的一端向下移动的同时还将绕逆时针方向转动,此时轮椅架体将在第四站立连杆的作用下绕其与第二导向杆的连接位置顺时针方向转动,由此,轮椅架体和背部靠架就实现了一边下降一边顺时针转动的效果,直到轮椅架体和背部靠架基本转动到水平,此时轮椅为平躺状态,然后轮椅再在平躺机构的作用下由平躺状态转变为坐姿状态即可。
30.优选的,所述第三站立连杆包括第一变胞连杆部和第二变胞连杆部,所述第一变胞连杆部的一端与所述第二站立连杆转动连接,所述第二变胞连杆部远离其连接所述第二站立连杆的一端与所述第二变胞连杆部转动连接,所述第二变胞连杆部远离其连接所述第一变胞连杆部的一端与所述第四站立连杆转动连接,且在轮椅为坐姿状态时所述第一变胞连杆部和所述第二变胞连杆部之间具有夹角,在轮椅由坐姿状态向抬升状态运行时,所述第一变胞连杆部和所述第二变胞连杆部之间的夹角逐渐增大,并在所述轮椅运行到抬升状态时所述第一变胞连杆部和所述第二变胞连杆部相对转动到沿纵向方向共线设置。
31.这样,通过将第三站立连杆设置为第一变胞连杆部和第二变胞连杆部的结构形式,当轮椅由平躺状态向抬升状态转换时,站立驱动组件的驱动端伸长,站立驱动组件的驱动端伸长时将同时带动对应位置的第二站立连杆和第一变胞连杆部的对应端沿第二导向槽沿纵向方向向前滑动,此时,第二站立连杆绕其与第一站立连杆的转动连接点逆时针转动,第一站立连杆与第一导向槽滑动连接的一端沿第一导向槽沿纵向方向向前移动,且第一站立连杆和第二站立连杆形成的剪叉结构还将在竖向方向向上移动,从而使得整个轮椅架体和背部靠架向上移动;另一方面,由于第一变胞连杆部和第二变胞连杆部之间具有夹角,此时在人体重力的作用下,第二变胞连杆部与第四站立连杆连接点处将保持不变,故此时第四站立连杆将不会对轮椅架体产生作用力,轮椅架体仅仅在剪叉结构的作用下竖向上移动而不会进行转动,直到轮椅运行到抬升状态,此时第一变胞连杆部和第二变胞连杆部刚好相对转动到沿纵向方向共线设置的位置,轮椅的升高过程完成。
32.当轮椅升高过程完成后,站立驱动组件的驱动端进一步伸长,在第一站立连杆盒第二站立连杆的剪叉结构作用下,轮椅架体仍然将不断的向上移动,同时,第一变胞连杆部在沿第二导向槽向前滑动时还将带动第二变胞连杆部同步向前滑动,此时第二变胞连杆部与第四站立连杆连接的一端也将向前移动,从而使得第四站立连杆与轮椅架体连接的一端
向上移动的同时还将绕顺时针方向转动,此时轮椅架体将在第四站立连杆的作用下绕其与第二导向杆的连接位置逆时针方向转动,由此,轮椅架体和背部靠架就实现了一边上升一边逆时针转动的效果,直到轮椅架体和背部靠架基本转动到竖直位置,此时轮椅为辅助站立状态,完成对轮椅上人体的辅助站立的效果。
33.综上,本方案利用第一变胞连杆部和第二变胞连杆部形成变胞结构,同时本方案融合了剪叉结构和变胞结构,通过一个驱动件实现两种不同的运动状态,在进行辅助升降与站立时,先将轮椅架体整体进行一定高度的抬升,然后再进行辅助站立,这种方式更符合辅助站立时人体工程学的特点,能够更好的提高辅助站立时人体使用轮椅的舒适性。
34.优选的,所述辅助升降站立机构还包括防倾覆连杆,在所述轮椅底盘上还设有滑块安装座,所述滑块安装座上转动连接有滑块,所述滑块上开设有滑槽,所述防倾覆连杆的一端转动连接在所述第一站立连杆与所述第一导向槽的滑动连接处,以使得所述第一站立连杆能够同步带动所述防倾覆连杆的对应位置沿所述第一导向槽滑动,所述防倾覆连杆远离其连接所述第一站立连杆的一端向下延伸并滑动伸出所述滑槽,且所述防倾覆连杆远离其连接所述第一站立连杆的一端在轮椅为辅助站立状态时能够与地面相抵。
35.这样,由于轮椅在辅助站立时其重心会出现偏移,进而会有发生倾覆的风险,故本方案设置有防倾覆连杆,在轮椅辅助站立的过程中,第一站立连杆在沿第一导向槽向前滑动时还将带动防倾覆连杆做平面运动,此时滑块做逆时针转动,防倾覆连杆将相对于滑块向左下方伸出,当轮椅转动到辅助站立状态时,防倾覆连杆的对应位置与地面相抵,进而利用防倾覆连杆与地面的相对作用力实现防止轮椅倾覆的风险。
36.优选的,所述平躺机构包括平躺驱动组件、以及在所述平躺驱动组件的水平驱动作用下能够运动的平躺连杆组件,所述平躺连杆组件还分别与所述背部靠架和所述脚部靠架连接,以使得所述平躺连杆组件能够在所述平躺驱动组件的驱动作用下带动所述背部靠架和所述脚部靠架同步沿相同方向绕所述轮椅架体转动;
37.在所述背部靠架用于与所述轮椅架体连接的位置设有第一连接管,在所述第一连接管沿纵向方向的后端凸出设有第一连接部,在所述轮椅架体用于与所述背部靠架连接的位置设有第二连接管,在所述第二连接管沿纵向方向的后端凸出设有第二连接部,所述第一连接部和所述第二连接部之间通过背部转动件进行转动连接,所述平躺连杆组件包括第一平躺连杆和第二平躺连杆,所述第一平躺连杆的一端与所述平躺驱动组件转动连接,所述第一平躺连杆远离其连接所述平躺驱动组件的一端向上延伸并与所述第二平躺连杆转动连接,所述第二平躺连杆远离其连接所述第一平躺连杆的一端与对应位置的所述背部靠架固定连接,在所述第一平躺连杆的轴向两侧还对称设有第三平躺连杆,所述第三平躺连杆的一端与对应位置的所述背部靠架固定连接,所述第三平躺连杆远离其连接所述背部靠架的一端向下延伸并转动连接由第四平躺连杆,所述第四平躺连杆远离其连接所述第三平躺连杆的一端向下延伸并转动连接有第五平躺连杆,所述第五平躺连杆远离其连接所述第四平躺连杆的一端沿纵向方向水平向前延伸并转动连接有第六平躺连杆,所述第六平躺连杆远离其连接所述第五平躺连杆的一端沿纵向方向向前延伸并与对应位置的所述脚部靠架转动连接。
38.这样,当需要轮椅由坐姿状态变为平躺状态时,平躺驱动组件向后侧水平推出,使得第一平躺连杆的下端跟随平躺驱动组件向后侧移动,此时第一平躺连杆的另一端带动第
二平躺连杆的对应端沿逆时针方向向下转动,此时第二平躺连杆与背部靠架连接的一端将带动背部靠架沿顺时针方向向下转动,此时背部靠架以背部转动件为中心绕轮椅架体顺时针向下转动,背部靠架沿顺时针向下转动的同时还将带动第三平躺连杆的对应端顺时针向下转动,第三平躺连杆远离其连接背部靠架的一端将带动第四平躺连杆逆时针向下转动,第四平躺连杆远离其连接所述第三平躺连杆的一端带动对应位置的第五平躺连杆沿纵向方向向后移动,此时第五平躺连杆连接第六平躺连杆的一端也将带动对应位置的第六平躺连杆沿纵向方向向后移动,第六平躺连杆远离其连接第五平躺连杆的一端逆时针向下转动,此时与第六平躺连杆连接的脚部靠架顺时针向上转动,当脚部靠架和背部靠架基本转动到与轮椅架体为同一平面的位置时,平躺驱动组件停止向后侧移动,此时轮椅完成由坐姿状态到平躺状态的转变,且在轮椅由坐姿状态到平躺状态的转变过程中,背部靠架和脚部靠架均同方向转动,即都是顺时针方向转动。
39.当轮椅需要由平躺状态转变为坐姿状态时,平躺驱动组件向前侧水平收缩复位,使得第一平躺连杆的下端跟随平躺驱动组件向前侧移动,此时第一平躺连杆的另一端带动第二平躺连杆的对应端沿顺时针方向向上转动,此时第二平躺连杆与背部靠架连接的一端将带动背部靠架沿逆时针方向向上转动,此时背部靠架以背部转动件为中心绕轮椅架体逆时针向上转动,背部靠架沿逆时针向上转动的同时还将带动第三平躺连杆的对应端逆时针向上转动,第三平躺连杆远离其连接背部靠架的一端将带动第四平躺连杆顺时针向上转动,第四平躺连杆远离其连接第三平躺连杆的一端带动对应位置的第五平躺连杆沿纵向方向向前移动,此时第五平躺连杆连接第六平躺连杆的一端也将带动对应位置的第六平躺连杆沿纵向方向向前移动,第六平躺连杆远离其连接第五平躺连杆的一端顺时针向上转动,此时与第六平躺连杆连接的脚部靠架逆时针向下转动,当脚部靠架和背部靠架基本转动竖直状态时,平躺驱动组件向前收缩复位,此时轮椅完成由平躺状态到坐姿状态的转变,且在轮椅由平躺状态到坐姿状态的转变过程中,背部靠架和脚部靠架均同方向转动,即都是逆时针方向转动。
附图说明
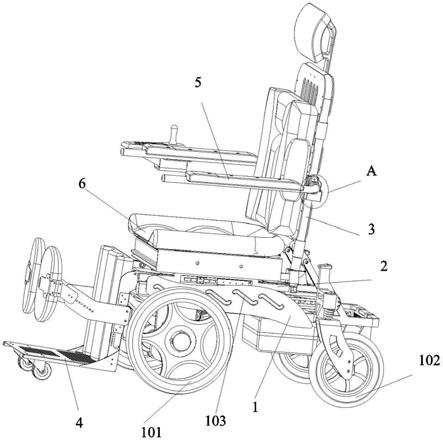
40.图1为本实用新型多功能轮椅的前侧结构示意图;
41.图2为图1中a处的放大示意图;
42.图3为本实用新型多功能轮椅的后侧结构示意图;
43.图4为本实用新型多功能轮椅中辅助上下机构以及其与轮椅架体连接处的爆炸示意图;
44.图5为本实用新型多功能轮椅中导向块与导向件的结构示意图;
45.图6为本实用新型多功能轮椅中辅助上下机构正向移动时的进程原理图;
46.图7为本实用新型多功能轮椅中辅助上下机构反向移动时的回程原理图;
47.图8为本实用新型多功能轮椅中其中一个视角的轮椅的爆炸示意图;
48.图9为本实用新型多功能轮椅中辅助升降站立机构的结构示意图;
49.图10为本实用新型多功能轮椅中辅助升降站立机构另一视角的局部爆炸示意图;
50.图11为本实用新型多功能轮椅中轮椅进行辅助站立时的姿态转换进程图;
51.图12为本实用新型多功能轮椅中轮椅的后侧示意图(隐藏部分轮椅架体结构);
52.图13为本实用新型多功能轮椅中轮椅的前侧示意图(隐藏部分轮椅架体结构);
53.图14为图13中b处的放大示意图;
54.图15为本实用新型多功能轮椅中轮椅的姿态转换进程图(隐藏部分轮椅架体结构);
55.图16为本实用新型多功能轮椅中脚部靠架的后侧结构示意图;
56.图17为本实用新型多功能轮椅中脚部靠架的后侧结构示意图。
57.附图标记说明:轮椅底盘1、驱动轮101、从动轮102、灯带装饰条103、车尾灯104、轮椅架体2、第二连接管201、第二连接部2011、背部靠架3、滑台连接件301、滑台限位部3011、第一连接管302、第一连接部3021、背部转动件3022、脚部靠架4、靠腿板401、脚底踏板402、腿宽调节片403、护腿调节片404、护腿连接片405、合页406、腿垫407、护腿横板408、腿部靠垫409、扶手5、凸轮连接件501、辅助上下机构6、坐垫601、翻转板602、移动板603、导向件604、上抬升推杆6041、推杆限位部60411、下抬升推杆6042、轴承滚轮6043、导向块605、导向槽6051、辅助电动推杆606、推杆连接件607、滑轨608、辅助升降站立机构7、站立驱动组件701、第一导向杆702、第一导向槽7021、第二导向杆703、第二导向槽7031、第一站立连杆704、第二站立连杆705、第四站立连杆706、防倾覆连杆707、滑块708、滑块安装座709、支撑部710、加强筋711、第一变胞连杆部712、第二变胞连杆部713、平躺机构8、平躺驱动组件801、第一平躺连杆802、第二平躺连杆803、第三平躺连杆804、第四平躺连杆805、第五平躺连杆806、导向滑块807、第六平躺连杆808。
具体实施方式
58.下面将结合附图及实施例对本实用新型作进一步说明。
59.如附图1到附图4所示,一种多功能轮椅,包括轮椅底盘1、轮椅架体2、对应于人体背部用以提供支撑的背部靠架3、以及对应于人体小腿部和足部用以提供支撑的脚部靠架4,还包括用以提供上下辅助功能的辅助上下机构6、用以提供平躺辅助功能的平躺机构8、以及用以提供辅助升降与站立功能的辅助升降站立机构7,轮椅架体2上滑动连接有移动板603,辅助上下机构6能够驱动移动板603沿轮椅架体2滑动,以使得移动板603靠近或远离车床处,平躺机构8能够带动背部靠架3和脚部靠架4绕轮椅架体2同向转动,以使得轮椅转动到坐姿状态或平躺状态,辅助升降站立机构7在轮椅为平躺状态时能够带动轮椅架体2、背部靠架3和脚部靠架4共同绕轮椅底盘1转动,以使得轮椅转动到辅助站立状态。
60.在本方案中,以人体坐在轮椅上时的方向作为参考方向,即本方案中的前、后、左、右、上、下分别对应为人体坐在轮椅上时的前、后、左、右、上、下,同时本方案中的轴向为左右方向,竖向为上下方向,纵向为前后方向;同时,本方案中的坐姿状态为人体平时坐在轮椅上时的轮椅的状态,平躺状态为人体平躺在轮椅上时的轮椅的状态,辅助站立状态为轮椅辅助人体完全站立时的轮椅的状态,抬升状态为轮椅辅助站立过程中轮椅架体2开始绕轮椅底盘1转动时的轮椅的状态,坐姿状态也为本方案轮椅使用的初始状态。
61.本实用新型的工作原理是:本方案的轮椅在使用时,当使用者需要从轮椅上移动到车上或床上时,辅助上下机构6驱动移动板603沿轮椅架体2向靠近车床的位置移动,以此来辅助使用者从轮椅上移动到车上或床上;当使用者需要由坐姿状态转换为平躺状态时,平躺机构8带动背部靠架3和脚部靠架4绕轮椅架体2同向顺时针转动,使得背部靠架3和脚
部靠架4沿轮椅架体2同步转动到基本水平的状态,此时轮椅由坐姿状态转换为平躺状态,当使用者需要由平躺状态转换为坐姿状态时,平躺机构8带动背部靠架3和脚部靠架4绕轮椅架体2同向逆时针转动,使得背部靠架3和脚部靠架4沿轮椅架体2同步转动到基本竖直的状态,此时轮椅由平躺状态转换为坐姿状态;当使用者需要从轮椅上进行站立时,首先轮椅在平躺机构8的作用下转换为平躺状态,然后辅助升降站立机构7再带动轮椅架体2、背部靠架3和脚部靠架4共同绕轮椅底盘1逆时针转动,直到轮椅架体2、背部靠架3和脚部靠架4基本转动到竖向状态,此时轮椅为辅助站立状态,并辅助使用者进行站立。
62.综上,本方案利用辅助上下机构6来辅助使用者从轮椅上到车上或床上进行移动,利用平躺机构8实现轮椅坐姿状态和平躺状态的转换,同时利用辅助升降站立机构7来辅助使用者从轮椅上进行站立,因此,本方案能够辅助使用者进行上下床、能够实现坐姿和平躺状态的转换,且能够辅助使用者进行站立。
63.在本实施例中,在背部靠架3的轴向两侧还分别设有扶手5,在背部靠架3与扶手5连接的位置设有滑台连接件301,在扶手5与背部靠架3连接的位置设有凸轮连接件501,凸轮连接件501与滑台连接件301转动连接,且在滑台连接件301上还设有滑台限位部3011,凸轮连接件501沿纵向方向的后侧在初始状态下与滑台限位部3011相抵。
64.这样,为了满足辅助上下机构6辅助使用者进行上下车床的功能,扶手5需要能够绕背部靠架3转动,同时又需要对扶手5的转动角度进行限制,因此在本方案中,扶手5和背部靠架3之间通过凸轮连接剪和滑台连接件301进行转动连接,同时通过在滑台连接件301上设置滑台限位部3011,并使得凸轮连接件501沿纵向方向的后侧在初始状态下与限位滑台部相抵,利用限位滑台部可以实现对凸轮连接件501转动角度的限制。
65.在本实施例中,轮椅底盘1的轴向两侧设有灯带装饰条103,且在轮椅底盘1纵向的两侧还分别设有前照灯和车尾灯104,在轮椅底盘1纵向方向的后侧还设有用于放置物品的载物框;
66.轮椅底盘1沿纵向方向的两侧还分别设有驱动轮101和从动轮102,且驱动轮101位于轮椅底盘1沿纵向方向的前侧,从动轮102位于轮椅底盘1沿纵向方向的后侧,驱动轮101的半径大于从动轮102的半径。
67.这样,由于本方案的轮椅在辅助上下车时,其工作场所会是在户外,且此时轮椅处于静止状态,如是在夜晚或大雾天气,易发生交通意外,本方案通过在轮椅底盘1的轴向两侧设置灯带装饰带,并在轮椅底盘1的前后两侧分别设置前照灯和车尾灯104,可以保证轮椅在户外场合使用的安全性,同时还起到了美化轮椅的效果。
68.另外,由于本方案具有辅助站立的功能,在轮椅辅助站立时轮椅的重心会发生偏移,进而容易发生倾斜,因此本方案将驱动轮101前置,并且使得驱动轮101的半径大于从动轮102的半径,因此来提高轮椅辅助站立使用过程中的稳定性能。
69.又如附图4所示,在本实施例中,移动板603上还竖向转动连接有翻转板602,翻转板602上设有坐垫601,且翻转板602在移动板603正向移动时能够沿同一方向绕移动板603竖向上转动;
70.辅助上下机构6还包括辅助导向组件,辅助导向组件包括设置在轮椅架体2上的导向块605、以及设置在翻转板602上并能够沿导向块605移动的导向件604,导向件604在沿导向块605正向移动时能够带动翻转板602沿同一方向绕移动板603竖向上转动。
71.这样,辅助上下机构6在辅助使用者从轮椅上移动到车上或床上时,当移动板603带动翻转板602和坐垫601同步向靠近车或床方向正向移动的同时,翻转板602还将沿同一方向绕移动板603竖向上转动,从而使得翻转板602在正向移动过程中向靠近车或床发生轻微的翻转,这样就会使得正向移动过程中坐垫601也会出现轻微的翻转的现象,坐垫601的轻微翻转会给予坐垫601上的使用者一个移动到车或床上的辅助作用力,在该辅助作用力的作用下,使得坐垫601上的使用者能够自行的完成从轮椅上到车上或床上的过程。
72.另外,通过设置辅助导向组件,利用辅助导向组件对翻转板602的移动和转动进行导向,当移动板603带动翻转板602沿轮椅架体2移动时,翻转板602上的导向件604将沿导向块605滑动,从而利用导向件604沿导向块605的滑动来对翻转板602的移动以及绕移动板603的转动进行导向,使得正向移动时,翻转板602能够沿同一方向绕移动板603竖向上转动,以达到翻转板602轻微翻转给予使用者一个辅助作用力的目的。
73.如附图5所示,在本实施例中,导向块605在移动板603的正向移动方向上整体呈先向上弯曲再向下弯曲的弧形结构,在导向块605上还开设有弧形结构的导向槽6051,导向件能够沿弧形结构的导向槽6051移动,以使得翻转板602正向移动时能够先绕移动板603竖向上转动再绕移动板603竖向下转动复位。
74.这样,导向块605在移动板603的正向移动方向上整体呈先向上弯曲再向下弯曲的弧形结构,而导向件则沿导向块605上的弧形结构的导向槽6051滑动,这样当移动板603正向移动时,导向件也将沿导向槽6051滑动,在移动板603正向移动过程的过程中,由于导向块605是先向上弯曲再向下弯曲的结构,故导向件在沿导向槽6051滑动时,导向件在移动到导向块605弧形结构的向上弯曲部分时,导向件的上端将会带动翻转板602绕移动板603竖向上转动为轻微的翻转状态,由此翻转板602可以为使用者上床或上车提供一定的辅助作用力,当使用者从轮椅上移动到车上或床上上,此时导向件将移动到导向块605弧形结构的向下弯曲部分,此时导向件的上端带动翻转板602绕移动板603竖向下转动并复位到初始状态。由此,本方案利用弧形结构的导向块605和导向件的配合,就可以实现翻转板602正向移动过程中绕移动板603竖向上转动为使用者提供辅助作用力的目的,同时翻转板602在完成助力效果后将自动进行复位。
75.又如附图5所示,在本实施例中,导向件604包括上抬升推杆6041和下抬升推杆6042,上抬升推杆6041固定连接在翻转板602上,下抬升推杆6042能够沿导向槽6051滑动,上抬升推杆6041和下抬升推杆6042通过第一纵向连接件进行转动连接,在上抬升推杆6041上还设有推杆限位部60411,推杆限位部60411在翻转板602正向移动时能够始终与对应位置的下抬升推杆6042相抵,以限制正向移动时上抬升推杆6041和下抬升推杆6042之间的相对转动,且在翻转板602反向移动时下抬升推杆6042能够绕上抬升推杆6041相对转动。
76.这样,通过设置上抬升推杆6041和下抬升推杆6042,且上抬升推杆6041和下抬升推杆6042之间只能进行单方向的转动;当移动板603正向移动时,上抬升推杆6041的推杆限位部60411始终与对应位置的下抬升推杆6042相抵,这样就使得上抬升推杆6041和下抬升推杆6042之间不会相对转动,此时,由于导向块605整体呈先向上弯曲再向下弯曲的弧形结构,当下抬升推杆6042沿导向块605移动时,其移动到导向块605向上弯曲部分时将因导向块605的向上抬升而带动翻转板602绕移动板603竖向上转动呈轻微翻转的状态,进而为使用者上车或上床提供辅助作用力,当使用者从轮椅上移动到车上或床上后,此时下抬升推
杆6042将移动到导向块605弧形结构的向下弯曲部分,此时下抬升推杆6042带动翻转板602绕移动板603竖向下转动并复位到初始状态(移动板正向移动时的进程原理图具体如附图6中的(a)、(b)、(c)、(d)顺序所示)。
77.当使用者从床上或车上重新回到轮椅上时,移动板603先正向移动到靠近车或床的位置,然后使用者从车上或床上移动到坐垫601上,此时辅助驱动组件带动移动板603反向移动,在移动板603反向移动过程中,由于下抬升推杆6042此时能够绕上抬升推杆6041相对转动,这样就会使得下抬升推杆6042在沿导向块605的弧形结构反向移动的过程中,在人体重力和构件之间的相互约束作用下,下抬升推杆6042通过绕上抬升推杆6041的相对转动来消除导向块605弧形结构的高度变化对翻转板602产生的影响,即此时翻转板602在反向移动过程中将不会绕移动板603转动而发生翻转现象(移动板反向移动时的进程原理图具体如附图7中的(a)、(b)、(c)、(d)顺序所示)。这样就可以确保使用者平稳的回到轮椅上,保证了整体回程的平稳性。
78.同时,根据运动轨迹的分析可知,辅助上下机构6的进程运动轨迹与导向块605的轮廓曲线基本一致,因此,在实际使用时,需要改变机构的运动轨迹时只需要修改导向块605的表面轮廓曲线即可,当导向块605的轨迹表现为先上升后下降的形式时,翻转板602相应的动作也为先顺时针翻转抬升助力,后逆时针翻转回到初始位置的形式,同时,机构的反向移动回程轨迹为一条直线,因此在回程时可平稳的辅助使用者下车或床并回到轮椅上。
79.在本实施例中,翻转板602反向移动时下抬升推杆6042能够绕上抬升推杆6041相对转动的角度为180
°
,以使得翻转板602反向移动时能够始终保持水平状态。
80.这样,翻转板602反向移动时下抬升推杆6042能够绕上抬升推杆6041相对转动的角度为180
°
,这样就可以使得整个反向移动过程中翻转板602始终保持为水平状态,使得坐垫601在反向移动回程的整个过程中均不会发生翻转,只进行平行滑动,从而确保使用者能够平稳的回到轮椅上。
81.在本实施例中,在下抬升推杆6042靠近导向槽6051的一端还设有轴承滚轮6043,轴承滚轮6043用于沿导向槽6051滑动。
82.这样,通过设置轴承滚轮6043,并利用轴承滚轮6043沿导向槽6051滑动,可以减小两者之间滑动的摩擦力。
83.在本实施例中,导向块605在移动板603正向移动方向上的弧形结构中向上弯曲部分的曲率半径大于向下弯曲部分的曲率半径。
84.这样,将导向块605的前半部分设计为曲率半径较大且向上弯曲的结构,并将后半部分设计为曲率半径较小的向下弯曲的结构,这样可以使得导向块605前半部分向上弯曲的结构能够使得翻转板602较为平缓的进行翻转助力,提高使用者的舒适性,同时,后半部分向下弯曲的结构设计为曲率半径较小的曲线轮廓形式,其目的是使得翻转板602完成助力后能够快速的复位;此外,机构在反向移动回程时,导向块605后半部分曲率半径较小的曲线轮廓还能给予下抬升推杆6042更大的横向力,使得下抬升推杆6042更容易在重力和相互作用力的共同作用下绕上抬升推杆6041转动,进而更好的实现平缓回程的效果。
85.在本实施例中,辅助驱动组件为辅助电动推杆606,辅助电动推杆606的推力为1300n,且辅助电动推杆606中电机的运行速度为7m/s。
86.这样,由于轮椅在辅助上下床时,主要要克服人体重力作用,故将辅助电动推杆
606的推力选择为1300n,通过计算该推力能满足绝大部分体重人体的推力需求,同时辅助电动推杆606中电机的运行速度为7m/s,使得整个辅助上下床过程的运行速度与较为缓慢。
87.在本实施例中,在辅助电动推杆606靠近移动板603的一端还设有推杆连接件607,辅助电动推杆606和移动板603之间通过推杆连接件607进行连接,且推杆连接件607用于与移动板603连接端的面积大于推杆连接件607用于与辅助电动推杆606连接端的面积。
88.这样,通过设置推杆连接件607,且推杆连接件607用于与移动板603连接端的面积大于推杆连接件607用于与辅助电动推杆606连接端的面积,这样使得推杆连接件607与移动板603的配合处具有较大的接触面积,从而保证推杆连接件607对移动板603的作用效果。
89.在本实施例中,翻转板602和移动板603之间通过合页进行竖向转动连接;
90.移动板603与对应位置的轮椅架体2之间通过滑轨608进行滑动连接。
91.如附图8到附图10所示,在本实施例中,在轮椅底盘1上设有沿纵向方向设置的第一导向杆702,第一导向杆702上沿其长度方向开设有第一导向槽7021,在轮椅架体2上转动连接有沿纵向方向设置的第二导向杆703,第二导向杆703上沿其长度方向开设有第二导向槽7031;
92.辅助升降站立机构7包括站立驱动组件701和站立连杆组件,站立连杆组件包括第一站立连杆704和第二站立连杆705,第一站立连杆704的一端滑动连接在第一导向杆702的第一导向槽7021内,第一站立连杆704远离其连接第一导向槽7021的一端向上延伸并与对应位置的第二导向杆703转动连接,第二站立连杆705的一端转动连接在轮椅底盘1上,第二站立连杆705远离其连接轮椅底盘1的一端向上延伸并滑动连接在第二导向杆703的第二导向槽7031内,第一站立连杆704和第二站立连杆705的中部转动连接以形成剪叉结构,在第二站立连杆705与第二导向槽7031滑动连接处还转动连接有第三站立连杆,且站立驱动组件701的驱动端也转动连接在第二站立连杆705和第三站立连杆的转动连接处,第三站立连杆远离其连接第二站立连杆705的一端沿纵向方向向后延伸并转动连接有第四站立连杆706,第四站立连杆706远离其连接第三站立连杆的一端向上延伸并与对应位置的轮椅架体2转动连接。
93.这样,本方案在进行辅助站立时,轮椅先在平躺机构8的作用下由坐姿状态转变为平躺状态,然后站立驱动组件701的驱动端伸长,站立驱动组件701的驱动端伸长时将同时带动对应位置的第二站立连杆705和第三站立连杆的对应端沿第二导向槽7031沿纵向方向向前滑动,此时,第二站立连杆705绕其与第一站立连杆704的转动连接点逆时针转动,第一站立连杆704与第一导向槽7021滑动连接的一端沿第一导向槽7021沿纵向方向向前移动,且第一站立连杆704和第二站立连杆705形成的剪叉结构还将在竖向方向向上移动,从而使得整个轮椅架体2和背部靠架3向上移动;另一方面,第三站立连杆的沿第二导向槽7031向前滑动时,第三站立连杆与第四站立连杆706连接的一端也将向前移动,从而使得第四站立连杆706与轮椅架体2连接的一端向上移动的同时还将绕顺时针方向转动,此时轮椅架体2将在第四站立连杆706的作用下绕其与第二导向杆703的连接位置逆时针方向转动,由此,轮椅架体2和背部靠架3就实现了一边上升一边逆时针转动的效果,直到轮椅架体2和背部靠架3基本转动到竖直位置,此时轮椅为辅助站立状态,完成对轮椅上人体的辅助站立的效果(轮椅进行辅助站立时的姿态转换进程图如附图11中的(a)、(b)、(c)、(d)顺序所示)。同时通过实际使用发现,本方案结构的轮椅在辅助站立过程中,随着轮椅整体高度的不断升
高,其转动的速度逐渐变缓,此运动特征也符合辅助站立时的要求。
94.当轮椅需要由辅助站立状态向坐姿状态转换时,站立驱动组件701的驱动端收缩,站立驱动组件701的驱动端收缩时将同时带动对应位置的第二站立连杆705和第三站立连杆的对应端沿第二导向槽7031沿纵向方向向后滑动,此时,第二站立连杆705绕其与第一站立连杆704的转动连接点顺时针转动,第一站立连杆704与第一导向槽7021滑动连接的一端沿第一导向槽7021沿纵向方向向后移动,且第一站立连杆704和第二站立连杆705形成的剪叉结构还将在竖向方向向下移动,从而使得整个轮椅架体2和背部靠架3向下移动;另一方面,第三站立连杆的沿第二导向槽7031向后滑动时,第三站立连杆与第四站立连杆706连接的一端也将向后移动,从而使得第四站立连杆706与轮椅架体2连接的一端向下移动的同时还将绕逆时针方向转动,此时轮椅架体2将在第四站立连杆706的作用下绕其与第二导向杆703的连接位置顺时针方向转动,由此,轮椅架体2和背部靠架3就实现了一边下降一边顺时针转动的效果,直到轮椅架体2和背部靠架3基本转动到水平,此时轮椅为平躺状态,然后轮椅再在平躺机构8的作用下由平躺状态转变为坐姿状态即可。
95.在本实施例中,第三站立连杆包括第一变胞连杆712部和第二变胞连杆713部,第一变胞连杆712部的一端与第二站立连杆705转动连接,第二变胞连杆713部远离其连接第二站立连杆705的一端与第二变胞连杆713部转动连接,第二变胞连杆713部远离其连接第一变胞连杆712部的一端与第四站立连杆706转动连接,且在轮椅为坐姿状态时第一变胞连杆712部和第二变胞连杆713部之间具有夹角,在轮椅由坐姿状态向抬升状态运行时,第一变胞连杆712部和第二变胞连杆713部之间的夹角逐渐增大,并在轮椅运行到抬升状态时第一变胞连杆712部和第二变胞连杆713部相对转动到沿纵向方向共线设置。
96.这样,通过将第三站立连杆设置为第一变胞连杆712部和第二变胞连杆713部的结构形式,当轮椅由平躺状态向抬升状态转换时,站立驱动组件701的驱动端伸长,站立驱动组件701的驱动端伸长时将同时带动对应位置的第二站立连杆705和第一变胞连杆712部的对应端沿第二导向槽7031沿纵向方向向前滑动,此时,第二站立连杆705绕其与第一站立连杆704的转动连接点逆时针转动,第一站立连杆704与第一导向槽7021滑动连接的一端沿第一导向槽7021沿纵向方向向前移动,且第一站立连杆704和第二站立连杆705形成的剪叉结构还将在竖向方向向上移动,从而使得整个轮椅架体2和背部靠架3向上移动;另一方面,由于第一变胞连杆712部和第二变胞连杆713部之间具有夹角,此时在人体重力的作用下,第二变胞连杆713部与第四站立连杆706连接点处将保持不变,故此时第四站立连杆706将不会对轮椅架体2产生作用力,轮椅架体2仅仅在剪叉结构的作用下竖向上移动而不会进行转动,直到轮椅运行到抬升状态,此时第一变胞连杆712部和第二变胞连杆713部刚好相对转动到沿纵向方向共线设置的位置,轮椅的升高过程完成。
97.当轮椅升高过程完成后,站立驱动组件701的驱动端进一步伸长,在第一站立连杆704盒第二站立连杆705的剪叉结构作用下,轮椅架体2仍然将不断的向上移动,同时,第一变胞连杆712部在沿第二导向槽7031向前滑动时还将带动第二变胞连杆713部同步向前滑动,此时第二变胞连杆713部与第四站立连杆706连接的一端也将向前移动,从而使得第四站立连杆706与轮椅架体2连接的一端向上移动的同时还将绕顺时针方向转动,此时轮椅架体2将在第四站立连杆706的作用下绕其与第二导向杆703的连接位置逆时针方向转动,由此,轮椅架体2和背部靠架3就实现了一边上升一边逆时针转动的效果,直到轮椅架体2和背
部靠架3基本转动到竖直位置,此时轮椅为辅助站立状态,完成对轮椅上人体的辅助站立的效果。
98.综上,本方案利用第一变胞连杆712部和第二变胞连杆713部形成变胞结构,同时本方案融合了剪叉结构和变胞结构,通过一个驱动件实现两种不同的运动状态,在进行辅助升降与站立时,先将轮椅架体2整体进行一定高度的抬升,然后再进行辅助站立,这种方式更符合辅助站立时人体工程学的特点,能够更好的提高辅助站立时人体使用轮椅的舒适性。
99.在本实施例中,辅助升降站立机构7还包括防倾覆连杆707,在轮椅底盘1上还设有滑块安装座709,滑块安装座709上转动连接有滑块708,滑块708上开设有滑槽,防倾覆连杆707的一端转动连接在第一站立连杆704与第一导向槽7021的滑动连接处,以使得第一站立连杆704能够同步带动防倾覆连杆707的对应位置沿第一导向槽7021滑动,防倾覆连杆707远离其连接第一站立连杆704的一端向下延伸并滑动伸出滑槽,且防倾覆连杆707远离其连接第一站立连杆704的一端在轮椅为辅助站立状态时能够与地面相抵。
100.这样,由于轮椅在辅助站立时其重心会出现偏移,进而会有发生倾覆的风险,故本方案设置有防倾覆连杆707,在轮椅辅助站立的过程中,第一站立连杆704在沿第一导向槽7021向前滑动时还将带动防倾覆连杆707做平面运动,此时滑块708做逆时针转动,防倾覆连杆707将相对于滑块708向左下方伸出,当轮椅转动到辅助站立状态时,防倾覆连杆707的对应位置与地面相抵,进而利用防倾覆连杆707与地面的相对作用力实现防止轮椅倾覆的风险。
101.在本实施例中,防倾覆连杆707远离其连接第一站立连杆704的一端向前弯曲并延伸形成支撑部710,支撑部710在轮椅为辅助站立状态时能够与地面相抵,且在支撑部710处还设有加强筋711。
102.这样,防倾覆连杆707远离其连接第一站立连杆704的一端向前弯曲并延伸形成支撑部710,利用支撑部710与地面相抵来防止轮椅的倾覆风险,支撑部710能够增大与地面的接触面积,进而提高支撑力和减小局部的应力集中,保证防倾覆连杆707工作的可靠性,同时,支撑部710处设置的加强筋711还能进一步提高其自身强度和对轮椅的支撑效果,同时进一步降低局部的应力集中情况。
103.在本实施例中,在轮椅底盘1上沿轴向方向对称设置两个第一导向杆702,在轮椅架体2上沿轴向方向对称设置有两个第二导向杆703,且在轮椅架体2上沿轴向方向还对称设有两个辅助升降站立机构7,辅助升降站立机构7分别与对应侧的第一导向杆702和第二导向杆703滑动连接,且两个辅助升降站立机构7之间还通过联动杆进行连接,以使得两个辅助升降站立机构7能够同步运行。
104.这样,通过在轴向两侧分别设置两个第一导向杆702、两个第二导向杆703和两个辅助升降站立机构7,利用第一导向杆702和第二导向杆703分别对对应侧辅助升降站立机构7的运动提供导向作用,同时辅助升降站立机构7分别从轴向两侧对轮椅架体2施加作用力,使得轮椅架体2在辅助站立过程中的运行更加的平稳可靠,另外,联动杆的设计可以保证两侧辅助升降站立机构7的同步运行,从而进一步保证轮椅辅助站立过程中的稳定性,提高使用可靠性。
105.在本实施例中,站立驱动组件701整体呈倾斜设置,且站立驱动组件701的驱动端
倾斜向上设置。
106.这样,站立驱动组件701倾斜设置可以更省力的将轮椅转换为辅助站立状态,从而减小站立驱动组件701所需要的驱动力。
107.在本实施例中,站立驱动组件701为站立电动推杆,站立电动推杆的推力为1300n,且站立电动推杆中电机的运行速度为7m/s。
108.这样,由于轮椅在辅助站立时,主要要克服人体重力和轮椅上半部分的重力作用,故将站立电动推杆的推力选择为1300n,通过计算该推力能满足绝大部分体重人体在进行辅助站立时的推力需求,同时站立电动推杆中电机的运行速度为7m/s,使得整个辅助站立过程的运行速度与较为缓慢。
109.如附图12到附图14所示,在本实施例中,平躺机构8包括平躺驱动组件801、以及在平躺驱动组件801的水平驱动作用下能够运动的平躺连杆组件,平躺连杆组件还分别与背部靠架3和脚部靠架4连接,以使得平躺连杆组件能够在平躺驱动组件801的驱动作用下带动背部靠架3和脚部靠架4同步沿相同方向绕轮椅架体2转动;
110.在背部靠架3用于与轮椅架体2连接的位置设有第一连接管302,在第一连接管302沿纵向方向的后端凸出设有第一连接部3021,在轮椅架体2用于与背部靠架3连接的位置设有第二连接管201,在第二连接管201沿纵向方向的后端凸出设有第二连接部2011,第一连接部3021和第二连接部2011之间通过背部转动件3022进行转动连接,平躺连杆组件包括第一平躺连杆802和第二平躺连杆803,第一平躺连杆802的一端与平躺驱动组件801转动连接,第一平躺连杆802远离其连接平躺驱动组件801的一端向上延伸并与第二平躺连杆803转动连接,第二平躺连杆803远离其连接第一平躺连杆802的一端与对应位置的背部靠架3固定连接,在第一平躺连杆802的轴向两侧还对称设有第三平躺连杆804,第三平躺连杆804的一端与对应位置的背部靠架3固定连接,第三平躺连杆804远离其连接背部靠架3的一端向下延伸并转动连接由第四平躺连杆805,第四平躺连杆805远离其连接第三平躺连杆804的一端向下延伸并转动连接有第五平躺连杆806,第五平躺连杆806远离其连接第四平躺连杆805的一端沿纵向方向水平向前延伸并转动连接有第六平躺连杆808,第六平躺连杆808远离其连接第五平躺连杆806的一端沿纵向方向向前延伸并与对应位置的脚部靠架4转动连接。
111.这样,当需要轮椅由坐姿状态变为平躺状态时,平躺驱动组件801向后侧水平推出,使得第一平躺连杆802的下端跟随平躺驱动组件801向后侧移动,此时第一平躺连杆802的另一端带动第二平躺连杆803的对应端沿逆时针方向向下转动,此时第二平躺连杆803与背部靠架3连接的一端将带动背部靠架3沿顺时针方向向下转动,此时背部靠架3以背部转动件3022为中心绕轮椅架体2顺时针向下转动,背部靠架3沿顺时针向下转动的同时还将带动第三平躺连杆804的对应端顺时针向下转动,第三平躺连杆804远离其连接背部靠架3的一端将带动第四平躺连杆805逆时针向下转动,第四平躺连杆805远离其连接第三平躺连杆804的一端带动对应位置的第五平躺连杆806沿纵向方向向后移动,此时第五平躺连杆806连接第六平躺连杆808的一端也将带动对应位置的第六平躺连杆808沿纵向方向向后移动,第六平躺连杆808远离其连接第五平躺连杆806的一端逆时针向下转动,此时与第六平躺连杆808连接的脚部靠架4顺时针向上转动,当脚部靠架4和背部靠架3基本转动到与轮椅架体2为同一平面的位置时,平躺驱动组件801停止向后侧移动,此时轮椅完成由坐姿状态到平
躺状态的转变,且在轮椅由坐姿状态到平躺状态的转变过程中,背部靠架3和脚部靠架4均同方向转动,即都是顺时针方向转动(具体轮椅由坐姿状态转变为平躺状态的过程图如附图15中的(a)、(b)、(c)、(d)顺序所示)。
112.当轮椅需要由平躺状态转变为坐姿状态时,平躺驱动组件801向前侧水平收缩复位,使得第一平躺连杆802的下端跟随平躺驱动组件801向前侧移动,此时第一平躺连杆802的另一端带动第二平躺连杆803的对应端沿顺时针方向向上转动,此时第二平躺连杆803与背部靠架3连接的一端将带动背部靠架3沿逆时针方向向上转动,此时背部靠架3以背部转动件3022为中心绕轮椅架体2逆时针向上转动,背部靠架3沿逆时针向上转动的同时还将带动第三平躺连杆804的对应端逆时针向上转动,第三平躺连杆804远离其连接背部靠架3的一端将带动第四平躺连杆805顺时针向上转动,第四平躺连杆805远离其连接第三平躺连杆804的一端带动对应位置的第五平躺连杆806沿纵向方向向前移动,此时第五平躺连杆806连接第六平躺连杆808的一端也将带动对应位置的第六平躺连杆808沿纵向方向向前移动,第六平躺连杆808远离其连接第五平躺连杆806的一端顺时针向上转动,此时与第六平躺连杆808连接的脚部靠架4逆时针向下转动,当脚部靠架4和背部靠架3基本转动竖直状态时,平躺驱动组件801向前收缩复位,此时轮椅完成由平躺状态到坐姿状态的转变,且在轮椅由平躺状态到坐姿状态的转变过程中,背部靠架3和脚部靠架4均同方向转动,即都是逆时针方向转动。
113.在本实施例中,在轮椅架体2上与第五平躺连杆806对应的位置还沿纵向方向设有导向滑块807,在导向滑块807上开设有沿纵向贯穿导向滑块807的导向滑槽,第五平躺连杆806滑动连接在对应位置的导向滑块807的导向滑槽内,以通过导向滑槽对第五平躺连杆806的移动进行导向限位。
114.这样,通过设置导向滑块807和导向滑槽,并将第五平躺连杆806滑动连接在导向滑槽内,利用导向滑槽可以对第五平躺连杆806的移动进行限位导向,使得第五平躺连杆806始终按既定的路线移动,由于第五平躺连杆806需要将背部靠架3一侧的运动传递到脚部靠架4的一侧,故第五平躺连杆806需要始终按既定路线移动,这样才能保证背部靠架3和脚部靠架4两者运动的一致性,进而保证轮椅由坐姿状态转变为平躺状态时的效果。
115.在本实施例中,第二平躺连杆803与对应位置背部靠架3之间的夹角为8-15
°
,且第二平躺连杆803的长度为150-200mm。
116.这样,为了使平躺驱动组件801有限的行程范围内确保背部靠架3转动足够的角度,需要对第二平躺连杆803的长度及其与背部靠架3之间的夹角进行限制,且在第二平躺连杆803与背部靠架3之间的夹角一定的情况下,第二平躺连杆803的长度越长,则背部靠架3转动相同角度需要的平躺驱动组件801的行程就越长,同时综合考虑背部靠架3与脚部靠架4的联动性等因素,最终确定出第二平躺连杆803与背部靠架3的夹角为8-15
°
,而第二平躺连杆803的长度为150-200mm。
117.在本实施例中,第三平躺连杆804与对应位置背部靠架3之间的夹角为40-50
°
,且第三平躺连杆804的长度为50-70mm。
118.这样,根据实验可以知道,当第三平躺连杆804与背部靠架3之间的夹角一定时,第三平躺连杆804的长度会影响到使得脚部靠架4转动相同角度需要的第五平躺连杆806的行程,通过综合考虑各因素,最终确定第三平躺连杆804与背部靠架3之间的夹角为40-50
°
,且
第三平躺连杆804的长度为50-70mm。
119.如附图16和附图17所示,在本实施例中,脚部靠架4包括固定连接的脚底踏板402和靠腿板401,在靠腿板401的轴向两侧分别固定连接有靠腿杆件,第六平躺连杆808远离其连接第五平躺连杆806的一端转动连接在对应位置的靠腿杆件上。
120.这样,通过设置脚底踏板402和靠腿板401,方便人体腿部位置的放置,人体在使用轮椅时,脚部可以放置在脚底踏板402上,而小腿位置可以靠在靠腿板401上,由此可以提高轮椅使用时的舒适性。
121.在本实施例中,在靠腿板401用于与人体小腿接触的端面呈与人体小腿相适应的弧形结构,在靠腿板401用于与人体小腿接触的端面上还设有柔性材料制成的腿部靠垫409,腿部靠垫409整体呈与人体小腿相适应的弧形结构。
122.这样,通过在靠腿板401上设置柔性材料制成的腿部靠垫409,且腿部靠垫409整体呈与人体小腿相适应的弧形结构,腿部靠垫409可以对人体的小腿位置进行支撑,由此可以进一步提高轮椅使用的舒适性。
123.在本实施例中,在靠腿板401的轴向两侧还对称设有护腿组件,护腿组件包括轴向设置的腿宽调节片403,腿宽调节片403的一端与对应位置的靠腿板401连接,腿宽调节片403的另一端转动连接有护腿调节片404,护腿调节片404远离其连接腿宽调节片403的一端沿纵向方向向前延伸并连接有护腿连接片405,护腿连接片405远离其连接护腿调节片404的一端转动连接有护腿横板408,护腿横板408上设有腿垫407。
124.这样,腿宽调节片403和护腿调节片404转动连接,护腿连接片405和护腿横板408转动连接,可以通过转动的方式来适应不同人体的小腿尺寸,从而进一步提高轮椅使用的舒适性。
125.在本实施例中,腿宽调节片403上沿轴向方向分布有多组腿宽调节孔,在靠腿板401上与腿宽调节片403对应的位置开设有腿宽安装孔,腿宽安装孔能够与不同位置的腿宽调节孔对应,且腿宽安装孔与对应位置的腿宽调节孔通过腿宽调节螺钉进行固定连接;
126.在护腿调节片404上沿其长度方向设有多个护腿调节孔,在护腿连接片405上设有护腿安装孔,护腿安装孔能够与不同位置的护腿调节孔对应,且护腿安装孔与对应位置的护腿调节孔通过护腿调节螺钉进行固定连接。
127.这样,腿宽调节片上的不同位置的腿宽调节孔与靠腿板上的腿宽安装孔进行对应,护腿调节片上的不同位置的护腿调节孔与护腿安装孔进行对应,可以进一步通过上述尺寸的调节老使用不同人体的小腿尺寸,进而更好的满足不同使用者的使用需求。
128.最后需要说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本实用新型的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本实用新型的权利要求范围当中。