1.本实用新型属于纸盒生产加工技术领域,具体涉及一种贴卡机。
背景技术:
2.随着制造业的发展过程中,纸盒的生产制造变的越来越广泛,在特定的产品包装生产过程中,往往需要对纸盒进行贴卡作业。现有的贴卡设备,往往是将贴卡工序和纸盒成型工序分别通过多台设备进行。从而使得贴卡成本太高,同时也增加操作人员操作不同设备的工作负担,贴卡效率较低。
技术实现要素:
3.本实用新型的目的是解决上述问题,提供一种结构简单,使用方便,制造成本较低,贴卡效率高的贴卡机。
4.为解决上述技术问题,本实用新型的技术方案是:一种贴卡机,包括贴卡机架,贴卡机架上设有给纸模块、搬运整形模块、丝印模块、视觉贴卡模块和吸风流水模块,待贴卡的纸张放置在给纸模块上,然后通过搬运整形模块进行搬运和整形后形成纸盒,然后在吸风流水模块的作用下依次经过丝印模块和视觉贴卡模块,完成贴卡作业。
5.优选地,所述给纸模块包括给纸支撑杆、第一料仓部件、第二料仓部件、料仓切换气缸和料仓底板,给纸支撑杆固定在贴卡机架上,料仓切换气缸的气缸端与贴卡机架相连,料仓切换气缸的活塞杆端与料仓底板的底部相连,料仓底板通过滑块与给纸支撑杆相连,第一料仓部件和第二料仓部件位于料仓底板上,料仓切换气缸推动料仓底板沿给纸支撑杆运动。
6.优选地,所述第一料仓部件包括第一料仓主体、第一料仓支撑板、第一料仓给纸电机、第一料仓给纸丝杆、第一料仓给纸导杆、第一料仓给纸上限位感应器和第一料仓给纸下限位感应器,第一料仓给纸电机和第一料仓给纸导杆位于料仓底板的底部,第一料仓给纸丝杆的端部穿过第一料仓给纸电机后与第一料仓支撑板转动连接,第一料仓支撑板位于第一料仓主体之内,第一料仓给纸上限位感应器和第一料仓给纸下限位感应器位于第一料仓给纸导杆上,第一料仓给纸电机驱动第一料仓给纸丝杆运动,从而推动第一料仓支撑板运动;第二料仓部件的结构与第一料仓部件的结构相同。
7.优选地,所述搬运整形模块包括搬运支架、整形支架、搬运伺服电机、搬运气缸、搬运连接件、搬运第一吸盘、搬运第二吸盘、整形第一气缸和整形第二气缸,搬运气缸通过搬运滑块与搬运支架相连,搬运伺服电机驱动搬运滑块在搬运支架上运动,搬运气缸的活塞杆端与搬运连接件相连,搬运气缸推动搬运连接件上下运动,搬运第一吸盘和搬运第二吸盘位于搬运连接件上;整形第一气缸和整形第二气缸位于整形支架内,整形第一气缸上设有整形第一气缸整形件,整形第二气缸上设有整形第二气缸整形件,整形第一气缸和整形第二气缸分别驱动整形第一气缸整形件和整形第二气缸整形件完成对纸张进行整形作业;纸张被搬运第一吸盘和搬运第二吸盘吸附后,在搬运伺服电机和搬运气缸工作下运动。
8.优选地,所述搬运连接件呈“u”字型结构。
9.优选地,所述丝印模块包括丝印模块支架、丝印气缸、丝印导杆、丝印连接架、丝印同步轮、丝印同步带、丝印刮刀第一气缸、丝印刮刀第二气缸、丝印刮刀滑块和丝印网板,丝印连接架包括丝印连接架第一支架、丝印连接架第一横杆、丝印连接架支撑轴和丝印连接架第二支架,丝印气缸的活塞杆端穿过丝印模块支架与丝印连接架第一支架相连,丝印导杆穿过丝印模块支架与丝印连接架第一支架相连;丝印连接架第一横杆的两端与丝印连接架第一支架相连,丝印连接架支撑轴的两端穿过丝印连接架第二支架后与丝印连接架第一支架相连,丝印网板与丝印连接架第二支架的底部相连,丝印同步轮的数量为二且分布在丝印连接架第一支架的两端并通过丝印同步带相连,丝印刮刀第一气缸和丝印刮刀第二气缸分别通过丝印刮刀滑块套设在丝印连接架支撑轴上,丝印刮刀滑块与丝印同步带相连;丝印刮刀第一气缸上设有丝印第一刮刀,丝印刮刀第二气缸上设有丝印第二刮刀,丝印刮刀第一气缸带动丝印第一刮刀运动,丝印刮刀第二气缸带动丝印第二刮刀运动。
10.优选地,所述视觉贴卡模块包括视觉贴卡支架、视觉贴卡支架上设有视觉贴卡机器人、视觉贴卡光源、视觉贴卡第一吸盘、视觉贴卡错位气缸、视觉贴卡第二吸盘、视觉贴卡取料气缸和视觉贴卡固定件,视觉贴卡机器人的底座与视觉贴卡支架固连,视觉贴卡第一吸盘位于视觉贴卡机器人的底部,视觉贴卡支架上设有视觉贴卡滑动支架,视觉贴卡滑动支架与视觉贴卡支架滑动连接,视觉贴卡错位气缸与视觉贴卡支架滑块相连,视觉贴卡取料气缸与视觉贴卡支架相连,视觉贴卡取料气缸的活塞杆端与视觉贴卡第二吸盘相连;待贴卡放置在视觉贴卡固定件上,视觉贴卡取料气缸通过视觉贴卡第二吸盘吸附贴卡后,放置在视觉贴卡滑动支架上,然后在视觉贴卡错位气缸的运动下将贴卡运动到视觉贴卡机器人的底部,然后视觉贴卡机器人通过视觉贴卡第一吸盘将贴卡吸附后贴附在纸盒上,视觉贴卡光源起到照明的作用。
11.优选地,所述吸风流水模块包括风机、吸风壳体、吸风皮带、吸风电机和吸风转轴,吸风转轴平行分布在贴卡机架上且通过吸风皮带相连,吸风转轴与吸风电机相连,吸风电机带动吸风转轴转动,从而使吸风皮带同步转动;吸风壳体上设有吸风壳体孔,吸风皮带在吸风壳体上运动,吸风皮带上设有吸风皮带孔,吸风壳体与风机相连,风机使吸风壳体内部产生空气吸力,从而通过吸风壳体孔和吸风皮带孔将纸张进行吸附。
12.本实用新型的有益效果是:本实用新型所提供的一种贴卡机结构简单,使用方便,能够同时进行纸盒的成型和贴卡。同时,贴卡效率较高,能够满足大规模生产的需求。
附图说明
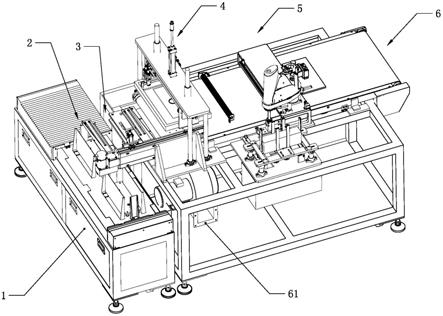
13.图1是本实用新型一种贴卡机的结构示意图;
14.图2是本实用新型给纸模块的结构示意图;
15.图3是本实用新型搬运整形模块的结构示意图;
16.图4是本实用新型丝印模块的结构示意图;
17.图5是本实用新型视觉贴卡模块的结构示意图。
18.附图标记说明:1、贴卡机架;2、给纸模块;3、搬运整形模块;4、丝印模块;5、视觉贴卡模块;6、吸风流水模块;20、给纸支撑杆;21、第一料仓部件;22、第二料仓部件;23、料仓切换气缸;24、料仓底板;30、搬运伺服电机;31、搬运气缸;32、搬运连接件;33、搬运第一吸盘;
34、搬运第二吸盘;35、整形第一气缸;36、整形第二气缸;40、丝印模块支架;41、丝印气缸;42、丝印导杆;43、丝印连接架;44、丝印同步轮;45、丝印同步带;46、丝印刮刀第一气缸;47、丝印刮刀第二气缸;48、丝印网板;51、视觉贴卡机器人;52、视觉贴卡光源;53、视觉贴卡第一吸盘;54、视觉贴卡错位气缸;55、视觉贴卡第二吸盘;56、视觉贴卡取料气缸;57、视觉贴卡固定件;61、风机;210、第一料仓主体;211、第一料仓支撑板;212、第一料仓给纸电机;213、第一料仓给纸丝杆;214、第一料仓给纸导杆;215、第一料仓给纸上限位感应器;216、第一料仓给纸下限位感应器;431、丝印连接架第一支架;432、丝印连接架第一横杆;433、丝印连接架支撑轴;434、丝印连接架第二支架。
具体实施方式
19.下面结合附图和具体实施例对本实用新型做进一步的说明:
20.如图1到图5所示,本实用新型提供的一种贴卡机,包括贴卡机架1,贴卡机架1上设有给纸模块2、搬运整形模块3、丝印模块4、视觉贴卡模块5和吸风流水模块6,待贴卡的纸张放置在给纸模块2上,然后通过搬运整形模块3进行搬运和整形后形成纸盒,然后在吸风流水模块6的作用下依次经过丝印模块4和视觉贴卡模块5,完成贴卡作业。
21.给纸模块2包括给纸支撑杆20、第一料仓部件21、第二料仓部件22、料仓切换气缸23和料仓底板24,给纸支撑杆20固定在贴卡机架1上,料仓切换气缸23的气缸端与贴卡机架1相连。料仓切换气缸23的活塞杆端与料仓底板24的底部相连,料仓底板24通过滑块与给纸支撑杆20相连。第一料仓部件21和第二料仓部件22位于料仓底板24上,料仓切换气缸23推动料仓底板24沿给纸支撑杆20运动。
22.在本实施例中,给纸支撑杆20的数量为二且平行的分布贴卡机架1上,料仓底板24与给纸支撑杆20相连的滑块为卡设在给纸支撑杆20的顶部。
23.第一料仓部件21包括第一料仓主体210、第一料仓支撑板211、第一料仓给纸电机212、第一料仓给纸丝杆213、第一料仓给纸导杆214、第一料仓给纸上限位感应器215和第一料仓给纸下限位感应器216,第一料仓给纸电机212和第一料仓给纸导杆214位于料仓底板24的底部。第一料仓给纸丝杆213的端部穿过第一料仓给纸电机212后与第一料仓支撑板211转动连接,第一料仓支撑板211位于第一料仓主体210之内,第一料仓给纸上限位感应器215和第一料仓给纸下限位感应器216位于第一料仓给纸导杆214上。第一料仓给纸电机212驱动第一料仓给纸丝杆213运动,从而推动第一料仓支撑板211运动,第二料仓部件22的结构与第一料仓部件21的结构相同。
24.第一料仓主体210包括四个第一料仓主体支撑板,四个第一料仓主体支撑板围成中间为矩形的结构,第一料仓主体支撑板的底部与料仓底板24通过螺栓相连。第一料仓主体支撑板为内凹结构,第一料仓主体支撑板的端面呈梯形状。
25.第一料仓给纸电机212为贯穿式电机,第一料仓给纸丝杆213穿设于第一料仓给纸电机212。第一料仓给纸电机212工作时带动第一料仓给纸丝杆213上下运动。
26.第一料仓给纸上限位感应器215和第一料仓给纸下限位感应器216与第一料仓给纸电机212电连接,当第一料仓给纸丝杆213运动过程中,分别靠近第一料仓给纸上限位感应器215和第一料仓给纸下限位感应器216时,第一料仓给纸电机212均停止工作,继而避免超出设计范围的危险情况出现。纸张放置在第一料仓支撑板211上,通过第一料仓主体支撑
板进行限位。
27.搬运整形模块3包括搬运支架、整形支架、搬运伺服电机30、搬运气缸31、搬运连接件32、搬运第一吸盘33、搬运第二吸盘34、整形第一气缸35和整形第二气缸36,搬运气缸31通过搬运滑块与搬运支架相连,搬运伺服电机30驱动搬运滑块在搬运支架上运动,搬运气缸31的活塞杆端与搬运连接件32相连,搬运气缸31推动搬运连接件32上下运动,搬运第一吸盘33和搬运第二吸盘34位于搬运连接件32上。整形第一气缸35和整形第二气缸36位于整形支架内,整形第一气缸35上设有整形第一气缸整形件,整形第二气缸36上设有整形第二气缸整形件,整形第一气缸35和整形第二气缸36分别驱动整形第一气缸整形件和整形第二气缸整形件完成对纸张进行整形作业。纸张被搬运第一吸盘33和搬运第二吸盘34吸附后,在搬运伺服电机30和搬运气缸31工作下运动。
28.搬运支架上设有搬运支架转轴和搬运支架皮带,搬运伺服电机30与搬运支架转轴相连,搬运支架转轴穿设于搬运支架皮带内,搬运支架皮带与搬运滑块固连。搬运伺服电机30工作时带动搬运支架转轴转动,从而带动搬运支架皮带和搬运滑块运动,继而带动搬运气缸31运动。
29.搬运第一吸盘33和搬运第二吸盘34与现有能产生真空吸力的设备相连,通过空气的吸附将纸盒进行吸附。在本实施例中,搬运连接件32呈“u”字型结构,搬运第一吸盘33和搬运第二吸盘34分别位于搬运连接件32的两端。搬运第一吸盘33和搬运第二吸盘34的数量分别为多个且平行布置在搬运连接件32上,以便能够对纸盒进行稳定的吸附。
30.搬运连接件32将吸附的纸张放置在整形支架上时,整形第一气缸35和整形第二气缸36工作,通过整形第一气缸整形件和整形第二气缸整形件对纸张进行纸盒整形作业,完成成型工作。整形后的纸盒通过搬运连接件32放置到吸风流水模块6上,进行后续的生产作业。
31.丝印模块4包括丝印模块支架40、丝印气缸41、丝印导杆42、丝印连接架43、丝印同步轮44、丝印同步带45、丝印刮刀第一气缸46、丝印刮刀第二气缸47、丝印刮刀滑块和丝印网板48,丝印连接架43包括丝印连接架第一支架431、丝印连接架第一横杆432、丝印连接架支撑轴433和丝印连接架第二支架434,丝印气缸41的活塞杆端穿过丝印模块支架40与丝印连接架第一支架431相连,丝印导杆42穿过丝印模块支架40与丝印连接架第一支架431相连。丝印连接架第一横杆432的两端与丝印连接架第一支架431相连,丝印连接架支撑轴433的两端穿过丝印连接架第二支架434后与丝印连接架第一支架431相连,丝印网板48与丝印连接架第二支架434的底部相连,丝印同步轮44的数量为二且分布在丝印连接架第一支架431的两端并通过丝印同步带45相连,丝印刮刀第一气缸46和丝印刮刀第二气缸47分别通过丝印刮刀滑块套设在丝印连接架支撑轴433上,丝印刮刀滑块与丝印同步带45相连。丝印刮刀第一气缸46上设有丝印第一刮刀,丝印刮刀第二气缸47上设有丝印第二刮刀,丝印刮刀第一气缸46带动丝印第一刮刀运动,丝印刮刀第二气缸47带动丝印第二刮刀运动。
32.丝印连接架43上设有丝印连接架电机、丝印连接架电机与丝印同步轮44相连,丝印同步带45套设在丝印同步轮44上。丝印连接架电机工作时带动丝印同步轮44转动,继而带动丝印同步带45运动。丝印刮刀滑块与丝印同步带45固连,丝印同步带45运动时带动丝印刮刀滑块上的丝印刮刀第一气缸46和丝印刮刀第二气缸47运动,继而使丝印第一刮刀和丝印第二刮刀在丝印网板48的上部滑动。
33.纸盒在通过吸风流水模块6运动到丝印模块支架40下后,丝印气缸41工作推动丝印连接架43向下运动,通过丝印网板48对纸盒完成丝印涂胶作业。丝印网板48上为凹槽型结构,丝印网板48的底部开设有小孔呈网状结构。丝印网板48底部与纸盒表面接触时,丝印第一刮刀和丝印第二刮刀在丝印网板48内的凹槽中运动,从而将粘胶通过丝印网板48底部的小孔刮到纸盒上。丝印网板48凹槽内的粘胶在丝印网板48内,由于丝印网板48底部小孔的直径和小孔的分布密度,能保证在没有刮刀刮动的情况下,粘胶不会从丝印网板48内部流出。在丝印第一刮刀和丝印第二刮刀的刮动过程中通过丝印网板48凹槽底部的小孔进入纸盒的表面。丝印网板48上所图的粘胶为现有成熟技术设备,用于丝印涂胶作业。
34.视觉贴卡模块5包括视觉贴卡支架、视觉贴卡支架上设有视觉贴卡机器人51、视觉贴卡光源52、视觉贴卡第一吸盘53、视觉贴卡错位气缸54、视觉贴卡第二吸盘55、视觉贴卡取料气缸56和视觉贴卡固定件57,视觉贴卡机器人51的底座与视觉贴卡支架固连,视觉贴卡第一吸盘53位于视觉贴卡机器人51的底部。视觉贴卡支架上设有视觉贴卡滑动支架,视觉贴卡滑动支架与视觉贴卡支架滑动连接,视觉贴卡错位气缸54与视觉贴卡支架滑块相连。视觉贴卡取料气缸56与视觉贴卡支架相连,视觉贴卡取料气缸56的活塞杆端与视觉贴卡第二吸盘55相连。
35.待贴卡放置在视觉贴卡固定件57上,视觉贴卡取料气缸56通过视觉贴卡第二吸盘55吸附贴卡后,放置在视觉贴卡滑动支架上。然后在视觉贴卡错位气缸54的运动下将贴卡运动到视觉贴卡机器人51的底部,视觉贴卡机器人51上设有视觉相机,在视觉相机对纸盒拍照定位后,视觉贴卡机器人51通过视觉贴卡第一吸盘53将贴卡吸附后贴附在纸盒上,视觉贴卡机器人51具有自身旋转和端部伸缩功能,视觉贴卡第一吸盘53位于视觉贴卡机器人51底部的可伸缩端部上。视觉贴卡机器人51在吸附贴卡后,旋转到纸盒的上方,然后通过端部的伸缩运动带动视觉贴卡第一吸盘53吸附的贴卡向纸盒内部运动,从而将贴卡放置在纸盒上,完成贴卡作业。视觉贴卡光源52起到照明的作用,使得贴卡作业更加准确和稳定。
36.在本实施例中,视觉贴卡机器人51为现有成熟技术的机器人设备,视觉贴卡错位气缸54将贴卡输送到视觉贴卡机器人51底部时,视觉贴卡第一吸盘53于现有的能产生真空吸力的设备相连,真空吸力设备将真空吸力传递到视觉贴卡第一吸盘53,从而将贴卡进行吸附。
37.吸风流水模块6包括风机61、吸风壳体、吸风皮带、吸风电机和吸风转轴,吸风转轴平行分布在贴卡机架1上且通过吸风皮带相连,吸风转轴与吸风电机相连,吸风电机带动吸风转轴转动,从而使吸风皮带同步转动。吸风壳体上设有吸风壳体孔,吸风皮带在吸风壳体上运动,吸风皮带上设有吸风皮带孔,吸风壳体与风机61相连,风机61使吸风壳体内部产生空气吸力,从而通过吸风壳体孔和吸风皮带孔将纸张进行吸附。
38.风机61为现有成熟技术设备,能够产生真空吸力。吸风皮带孔和吸风壳体孔连通,风机61产生的真空吸力能够通过吸风皮带孔将纸盒进行吸附。贴卡机架1上设有真空发生器,真空发生器为现有成熟技术设备,能够产生真空吸力。真空发生器分别与搬运第一吸盘33、搬运第二吸盘34、视觉贴卡第一吸盘53和视觉贴卡第二吸盘55相连通,从而产生真空吸附力。
39.本实用新型在使用过程中,纸张放置在给纸模块2中,然后通过搬运整形模块3成型为纸盒,然后放置在吸风流水模块6上,依次通过丝印模块4和视觉贴卡模块5,进行丝印
和贴卡作业,从而完成了纸盒的成型和贴卡多个工序,节约了人力成本,生产效率高。
40.本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本实用新型的原理,应被理解为本实用新型的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本实用新型公开的这些技术启示做出各种不脱离本实用新型实质的其它各种具体变形和组合,这些变形和组合仍然在本实用新型的保护范围内。