1.本实用新型涉及一种无影灯电动助力防撞控制系统。
背景技术:
2.手术无影灯用来照明手术部位,以最佳地观察处于切口和体腔中不同深度的小的、对比度低的物体。由于施手术者的头、手和器械均可能对手术部位造成干扰阴影,因而手术无影灯就应设计得能尽量消除阴影,并能将色彩失真降到最低程度。原有的无影灯在进行调节时,各个角度的动作都是通过平衡或靠摩擦力固定,临床医生使用无影灯时操控无影灯不方便,使用时间长部分产品无法固定到医生想要的角度,同时无影灯弹簧臂组件价格昂贵,使用寿命短。
技术实现要素:
3.本实用新型的目的是提供一种无影灯电动助力防撞控制系统。
4.上述的目的通过以下的技术方案实现:
5.一种无影灯电动助力防撞控制系统,其组成包括:压力传感器、低压安全步进旋转电机a和上端横向灯臂,所述的低压安全步进旋转电机a与所述的上端横向灯臂的一端连接,所述的上端横向灯臂的另一端通过低压安全步进旋转电机b与上垂直灯臂的一端连接,所述的上垂直灯臂的另一端通过低压安全步进角度电机a与中端横向灯臂的一端连接,所述的中端横向灯臂的另一端通过低压安全步进角度电机b与下垂直灯臂的一端连接,所述的下垂直灯臂的另一端通过低压安全步进旋转电机c与下端横向灯臂的一端连接,所述的下端横向灯臂的另一端与控制灯管面板的壳体连接;
6.所述的控制灯管面板的一侧通过低压安全步进旋转电机d与连接灯头灯臂的一端连接,所述的连接灯头灯臂的另一端通过低压安全步进旋转电机e与灯头连接;
7.所述的控制灯管面板上连接有运动开关。
8.所述的无影灯电动助力防撞控制系统,所述的低压安全步进旋转电机a、低压安全步进旋转电机b、低压安全步进旋转电机c、低压安全步进旋转电机d、低压安全步进旋转电机e、低压安全步进角度电机a和低压安全步进角度电机b为相同结构的低压步进电机;
9.所述的无影灯电动助力防撞控制系统,每个所述的低压步进电机上安装有压力传感器,所述的压力传感器将信号传递给plc电路板。
10.本实用新型的有益效果:
11.1.本实用新型在各个角度动作内首次添加了电机的使用,且各个电机都是助力电机。可单手操控,能够对无影灯各个角度位置固定牢靠,与传统的弹簧臂相比价格低廉,使用寿命长。
12.2.本实用新型按下运动开关,通过压力监测传感器传导信号给plc电路板,电路板输出信号给各个传感器对应低压安全步进电机,电机动作实现无影灯各个角度调节。
13.3.本实用新型对无菌手术室无影灯吊臂升级改进。改变了传统的机械定位不方
便、不易精确定位等影响手术照明效果的实际困扰。同时本新型具有产品成本降低,不受使用年限影响,无影灯固定位置锁定牢靠,角度灵活,固定后不松动等特点。
14.4.本实用新型的推广方式可分为两种,一是在现有的无影灯设备的基础上加装本改进版装置,从而达到升级提档。另有一个是将本装置直接融入新无影灯产品线。普及开来后,无论哪种方式,都能实现低成本、大功效、大市场的格局。
15.5.本实用新型使用时首先按下运动开关,拖动把手用力调整想要的角度,这时各个角度以及压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈各个传感器对应的低压步进电机,低压步进电机转动带动无影灯调整角度。松开开关,压力传感器信号中断,plc电路板停止低压步进电机供电,无影灯灯臂通过电机变速齿轮咬合起到固定作用。无影灯位置停止并固定。
16.附图说明:
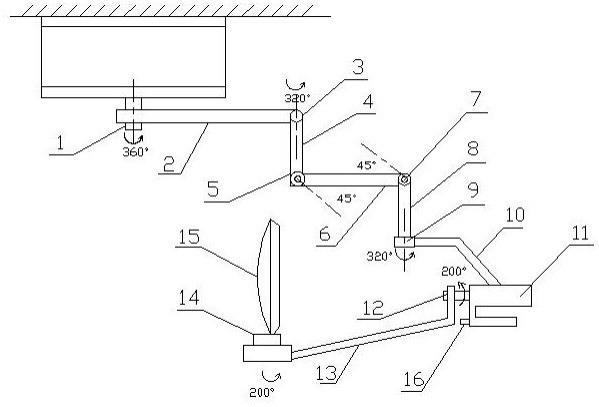
17.附图1是本实用新型的结构示意图。
18.图中:1、低压安全步进旋转电机a,2、上端横向灯臂,3、低压安全步进旋转电机b,4、上垂直灯臂,5、低压安全步进角度电机a,6、中端横向灯臂,7、低压安全步进角度电机b,8、下垂直灯臂,9、低压安全步进旋转电机c,10、下端横向灯臂,11、控制灯管面板,12、低压安全步进旋转电机d,13、连接灯头灯臂,14、低压安全步进旋转电机e,15、灯头,16、运动开关。
19.具体实施方式:
20.实施例1:
21.一种无影灯电动助力防撞控制系统,其组成包括:低压安全步进旋转电机a1和上端横向灯臂2,所述的低压安全步进旋转电机a与所述的上端横向灯臂的一端连接,所述的上端横向灯臂的另一端通过低压安全步进旋转电机b3与上垂直灯臂4的一端连接,所述的上垂直灯臂的另一端通过低压安全步进角度电机a5与中端横向灯臂6的一端连接,所述的中端横向灯臂的另一端通过低压安全步进角度电机b7与下垂直灯臂8的一端连接,所述的下垂直灯臂的另一端通过低压安全步进旋转电机9c与下端横向灯臂10的一端连接,所述的下端横向灯臂的另一端与控制灯管面板11的壳体连接;所述的控制灯管面板的一侧通过低压安全步进旋转电机d12与连接灯头灯臂13的一端连接,所述的连接灯头灯臂的另一端通过低压安全步进旋转电机e14与灯头15连接;所述的控制灯管面板上连接有运动开关16。
22.实施例2:
23.根据实施例1所述的无影灯电动助力防撞控制系统,所述的低压安全步进旋转电机a、低压安全步进旋转电机b、低压安全步进旋转电机c、低压安全步进旋转电机d、低压安全步进旋转电机e、低压安全步进角度电机a和低压安全步进角度电机b为相同结构的低压步进电机。
24.实施例3:
25.根据实施例1或2所述的无影灯电动助力防撞控制系统,每个所述的低压步进电机上安装有压力传感器,所述的压力传感器将信号传递给plc电路板。
26.实施例4:
27.首先按下运动开关,拖动把手用力调整想要的角度。这时低压安全步进旋转电机a上的压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈传感器对应低压安全
步进旋转电机a,低压安全步进旋转电机a转动调节上端横向灯臂旋转;
28.低压安全步进旋转电机b上的压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈传感器对应低压安全步进旋转电机b,低压安全步进旋转电机b转动调节中端横向灯臂旋转;
29.低压安全步进角度电机a上的压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈传感器对应低压安全步进角度电机a,低压安全步进角度电机a转动调节中端横向灯臂与上垂直灯臂角度;
30.低压安全步进角度电机b上的压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈传感器对应的低压安全步进角度电机b,低压安全步进角度电机b转动调节中端横向灯臂与下垂直灯臂角度;
31.低压安全步进旋转电机c上的压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈传感器对应低压安全步进旋转电机c, 低压安全步进旋转电机c转动调节下端横向灯臂旋转;
32.低压安全步进旋转电机d上的压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈传感器对应的低压安全步进旋转电机d,低压安全步进旋转电机d转动调节连接灯头灯臂旋转旋转;
33.低压安全步进旋转电机e上的压力传感器将信号传递给顶端plc电路板,plc电路板将信号反馈传感器对应的低压安全步进旋转电机d,低压安全步进旋转电机d转动调节灯头角度;
34.松开开关,压力传感器信号中断,plc电路板停止电机供电,无影灯灯臂通过电机变速齿轮咬合起到固定作用。