1.本发明属于热能动力工程和自动控制领域,具体涉及一种电站锅炉主蒸汽温度控制方法。
背景技术:
2.电站锅炉的主蒸汽温度是机组安全、经济运行的重要参数之一,若汽温太高则容易烧坏过热器及损坏汽机的进汽部件;汽温太低不仅会影响到经济性而且也会造成汽机未级的蒸汽湿度过大而损坏叶片。因此,为保证电站机组运行的安全性和经济性,要求主汽温必须严格控制在规定的范围内。然而,由于主蒸汽温度的干扰因素较多,如给煤量、送风量、引风量、减温水温度等因素都会影响主汽温,导致实际运行中温度波动较大。另外一方面,减温水控制回路本身的惯性和滞后都很大,导致常规控制方法,如单回路pid控制、串级控制、串级
‑
前馈等控制策略都难以获得良好的跟踪性能和抗扰性能,控制品质难以保证。在实际应用中,在系统负荷调整时,主蒸汽温度往往波动较大,如有些电厂当机组负荷仅以2%mcr/min的速率变化时,汽温就偏离设定值10℃以上。这时往往需要通过手动操作来控制汽温,即使有经验的运行人员也只能降低汽温设定值来运行,这样不但降低了机组的经济性,还增加了运行人员的劳动强度。
技术实现要素:
3.本发明针对传统单回路、串级等控制策略的不足,给出一种电站锅炉主蒸汽温度控制方法,用以提升主蒸汽温度的平稳性。采用两个独立的控制系统分别对二级过热器出口温度和三级过热器出口温度进行独立控制,两个温度控制系统的温度设定值的温差同机组运行负荷成正比;每个温度控制系统采用双控制器的结构,充分考虑系统的跟踪性能和抗干扰性能,分别设计相应的跟踪控制器和抗扰控制器,使得主蒸汽温度控制系统的跟踪温度设定的性能和抑制扰动的性能均得到加强。
4.本发明具体包括以下步骤:
5.步骤1:建立喷水减温过程的传递函数模型:
6.通过系统辨识的方法获取三级喷水减温和二级喷水减温过程的数学模型:和其中s为拉普拉斯算子;t
11
、t
12
、t
21
和t
22
为惯性时间常数;k1和k2分别为稳态增益系数;y2为二级过热器出口蒸汽温度;y1为三级过热器出口蒸汽温度,u1和u2分别为二级喷水阀和一级喷水阀开度;l1和l2分别为两个被控过程的纯滞后时间。上述两个模型中的参数能够通过传系统辨识获取。
7.步骤2:采用双控制的结构分别设计两个温度控制系统:
8.基于步骤1建立的模型,分别设计两个温度控制器tc1和tc2,采用两个控制器组成一个温度控制系统,同时实现对跟踪性能和抗扰性能的独立控制;温度控制器tc1包括第一跟踪控制器c
11
和第一抗扰控制器c
12
,分别负责系统跟踪性能的控制和抗扰性能的调节;温
度控制器tc2同温度控制器tc1采用相同的结构,包括第二跟踪控制器c
21
和第二抗扰控制器c
22
;c
11
、c
12
、c
21
和c
22
均采用带不完全微分形式的pid控制器:其中c
ij
(s)为控制器,下标i=1,2,j=1,2。
9.为获得良好的控制性能,需要对控制器参数进行整定;在温度控制器tc1中,第一跟踪控制器c
11
的整定公式如下:
[0010][0011]
其中控制器参数k
p1
、t
i1
、t
d1
和t
f1
分别为第一跟踪控制器的比例、积分、微分和滤波系数;上式中的参数λ1的选择范围为0<λ1<min(t
11
,t
12
),数值越大系统的跟踪性能越慢,数值越小跟踪速度越快,根据实际减温水阀的工作范围进行确定。
[0012]
第一抗扰控制器c
12
的整定公式如下:
[0013][0014]
其中控制器参数k
p2
、t
i2
、t
d2
和t
f2
分别为第一抗扰控制器的比例、积分、微分和滤波系数;上式中的参数β1的选择范围为0<β1<min(t
11
,t
12
),数值越大系统的抗扰性能越差,但稳定性越好;数值越小抗扰性能越好,但稳定性越差;根据实际系统的减温水阀工作范围进行确定;
[0015]
由于采用了相同结构的模型和控制器类型,温度控制器t
c2
中的两个控制器c
21
和c
22
也采用同样的整定公式进参数整定;
[0016]
步骤3:计算二级过热器出口温度控制系统的设定温度r2:
[0017]
三级过热器出口温度的设定为r1,二级过热器出口设定温度应随负荷大小的变化而变化,按照当前负荷大小按比例自动计算;假设过热蒸汽的温度设定为r1,二级过热器出口温度的设定为r2,两者的温差δr=r1‑
r2,具体温差同实际负荷设定成正比;具体计算公式为:
[0018][0019]
其中m
c
为当前运行负荷的期望值,m
t
为满负荷数;
[0020]
步骤4:计算各控制器的控制量:
[0021]
⑴
、计算内部模型预测输出
[0022]
其中和分别为内部模型的预测输出值的当前值、上一时刻的值和上上时刻的值,参数α1、α2和α3的计算公式如下:
[0023][0024]
其中t
s
为控制周期,下标中的k代表采样时刻,t
11
和t
12
为模型参数;在计算之后,再根据温度设定值r1确定第一跟踪控制器c
11
的输入e
11
:
[0025]
⑵
、计算第一跟踪控制器c
11
的控制量u
11
:
[0026]
u
11,k
=u
11,k
‑1+q0e
11,k
+q1e
11,k
‑1+q2e
11,k
‑2+q3δu
d11,k
‑1;
[0027]
其中u
11,,k
表示第一跟踪控制器c
11
在k时刻的控制量,下标的数字表示对应的控制器;e
11,k
、e
11,k
‑1和e
11,k
‑2分别为当前时刻误差、上一时刻误差和上上时刻误差;u
d11
为辅助微分变量,初值u
d11,0
选择为0;上式中δu
d11,k
‑1=u
d11,k
‑1‑
u
d11,k
‑2为内部微分项输出增量,内部中间变量q0~q3的计算方式如下:
[0028][0029]
⑶
、计算第一抗扰控制器c
12
的控制作用u
12
:
[0030]
由于得到偏差e
12
的计算结果:由于控制器c
11
和c
12
均采用同样的结构,其计算方式也是一致的,u
12
的计算过程参考u
11
;两者的区别在于输入偏差、控制器参数及内部变量的初始值;
[0031]
⑷
、计算第二跟踪控制器c
21
和第二抗扰控制器c
22
的控制量u
21
和u
22
:
[0032]
第二跟踪控制器c
21
和第二抗扰控制器c
22
的结构和计算方式同c
11
和c
12
一致;在分
别确定各pid控制器的四个参数k
p
、t
i
、t
d
和t
f
之后,相应的系数q0~q3也会唯一确定;
[0033]
⑸
、分别计算两级控制器tc1和tc2的控制量u1和u2:
[0034]
在分别计算四个控制器c
11
、c
12
、c
21
和c
22
的控制作用输出之后,可以按照如下公式计算温度控制器tc1和tc2的控制作用u1和u2:
[0035][0036]
其中u
11,k
、u
12,k
、u
21,k
和u
22,k
分别为控制器c
11
、c
12
、c
21
和c
22
的控制作用;计算出控制作用u1和u2后可以直接作用于现场减温阀,实施控制;重复步骤3
‑
4。
[0037]
本发明的突出优势在于可以有效克服现场各种扰动对主汽温带来的影响,降低主蒸汽温度的波动,进而提高系统运行的安全性和经济性。
附图说明
[0038]
图1为喷水减温过程流程图;
[0039]
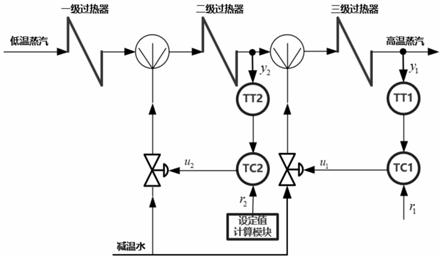
图2为过热蒸汽温度控制系统结构图;
[0040]
图3为二级喷水减温过程控制系统结构图;
[0041]
图4为一级喷水减温过程控制系统结构图。
具体实施方式
[0042]
一种电站锅炉主蒸汽温度控制方法,具体包括以下步骤:
[0043]
步骤1:建立喷水减温过程的传递函数模型:
[0044]
电站锅炉喷水减温过程的工艺流程如图1所示,低温蒸汽经过三级过热环节变为高温蒸汽用于汽轮机做功。为保证汽轮机的安全和运行效率,要求进入汽轮机的蒸汽达到设定的温度。如果蒸汽温度超过期望的温度,通过一、二级喷水阀进行喷水减温。喷水减温过程的物理特征:采用如下二阶惯性加滞后传递函数模型来描述两个喷水减温过程:
[0045][0046][0047]
其中s为拉普拉斯算子;t
11
、t
12
、t
21
和t
22
为惯性时间常数;k1和k2分别为稳态增益系数;y2为二级过热器出口蒸汽温度;y1为三级过热器出口蒸汽温度;u1和u2分别为二级喷水阀和一级喷水阀开度;l1和l2分别为两个被控过程的纯滞后时间。上述两个模型中的参数能够通过传统的系统辨识的方法获取。
[0048]
步骤2.1:设计三级过热器出口温度控制系统:
[0049]
在得到传递函数模型(1)和(2)之后,分别对两个回路设计控制器,带工艺点的过热蒸汽温度控制系统如图2所示,整个控制系统包含tc1和tc2两级控制系统,分别实现对二级过热器和三级过热器出口温度的控制。
[0050]
三级过热器出口温度的控制系统tc1的设计:该温度控制系统主要通过二级喷水阀实现对三级过热器出口温度的控制。在步骤1中已得到二级喷水阀对三级过热器出口温
度的传递函数模型(1),基于模型(1)进行控制器设计。考虑到三级过热器出口温度的稳定性和合理性对系统运行的安全性和经济性有重要影响,在设计过程中充分考虑系统的跟踪性能和抗干扰性能,努力确保在负荷、燃烧、风烟系统等发生变化的情况下主蒸汽温度依然能够较为平稳。由于传统的单回路控制器,如pid控制,难以兼顾跟踪性能和抗扰性能。
[0051]
如图3所示,本实例中采用两个控制器组成一个温度控制系统,同时实现对跟踪性能和抗扰性能的独立控制。其中第一跟踪控制器c
11
负责系统跟踪性能的控制,本实施例中选用带不完全微分形式的pid控制器:
[0052][0053]
其中控制器参数k
p1
、t
i1
、t
d1
和t
f1
分别为第一跟踪控制器的比例、积分、微分和滤波系数,按如下公式进行整定:
[0054][0055]
公式(4)中的参数λ1为用户自选参数,选择范围为0<λ1<min(t
11
,t
12
),数值越大系统的跟踪性能越慢,数值越小跟踪速度越快,根据实际减温水阀的工作范围进行确定。
[0056]
第一抗扰控制器c
12
负责改善系统的抗扰性能,本实施例中选用带不完全微分形式的pid控制器:
[0057][0058]
其中控制器参数k
p2
、t
i2
、t
d2
和t
f2
分别为第一抗扰控制器的比例、积分、微分和滤波系数,按如下公式进行整定:
[0059][0060]
公式(6)中的参数β1为用户自选参数,选择范围为0<β1<min(t
11
,t
12
),数值越大系统的抗扰性能越差,但稳定性越好;数值越小抗扰性能越好,但稳定性越差。根据实际系统的减温水阀工作范围进行确定。
[0061]
步骤2.2:设计二级过热器出口温度控制系统:
[0062]
二级过热器出口温度的控制系统tc2的设计:二级过热器出口温度对作为重要的中间变量,对主蒸汽温度有很大影响,该温度点的稳定性直接关系到主蒸汽温度的品质。在该控制系统的设计中采用同步骤2类似的策略,即双控制器策略。其中第二跟踪控制器c
21
负责系统跟踪性能的控制,选择带不完全微分形式的pid控制器:
[0063][0064]
其中控制器参数k
p3
、t
i3
、t
d3
和t
f3
分别为第二跟踪控制器的比例、积分、微分和滤波系数,可以按如下公式进行整定:
[0065][0066]
公式(8)中的参数λ2为用户自选参数,选择范围为0<λ2<min(t
21
,t
22
),数值越大系统的跟踪速度越慢;数值越小跟踪速度越快。可以根据减温水阀实际工作范围进行确定。
[0067]
第二抗扰控制器c
22
负责改善系统的抗扰性能,这里同样选择带不完全微分形式的pid控制器:
[0068][0069]
其中控制器参数k
p4
、t
i4
、t
d4
和t
f4
分别为比例、积分、微分和滤波系数,可以按如下公式进行整定:
[0070][0071]
公式(10)中的参数β2为用户自选参数,选择范围为0<β2<min(t
21
,t
22
),数值越大系统的抗扰性能越差,但稳定性越好;数值越小抗扰性能越好,但稳定性越差。根据实际系统的减温水阀工作范围进行确定。
[0072]
步骤3:计算二级过热器出口温度控制系统的设定温度r2:
[0073]
二级过热器出口设定温度应随负荷大小的变化而变化,一般能够根据经验确定,也能够按照当前负荷大小按比例自动计算。假设过热蒸汽的温度设定为r1,二级过热器出口温度的设定为r2,本实例选择两者的温差δr=r1‑
r2维持在10
‑
20℃,具体温差同实际负荷设定成正比。具体计算公式为:
[0074][0075]
其中m
c
为当前运行负荷的期望值,m
t
为满负荷数。
[0076]
步骤4:计算各控制器的控制量:
[0077]
本实施例以二级喷水减温过程的控制系统t
c1
为例介绍控制量u1的计算过程,一级喷水减温过程的控制系统t
c2
的控制量u2的计算过程和该过程是一致的。
[0078]
(1)计算内部模型预测输出
[0079]
根据模型(1)以及系统结构图3,利用后项差分方式将其离散化计算内部模型的预测输出值
[0080][0081]
其中:
[0082][0083]
其中t
s
为控制周期,一般为0.5s或者1s,t
11
和t
12
的定义同式(1)一致,下标中的k代表。在基于式(12)和(13)计算之后,在根据温度设定值r
1,k
和模型预测输出确定误差e
11,k
作为第一跟踪控制器c
11
的输入:
[0084][0085]
(2)计算第一跟踪控制器c
11
的控制量u
11
:
[0086]
第一跟踪控制器c
11
产生的控制作用通过将式(3)的pid控制器离散化获得。这里采用增量pid的形式,给出第一跟踪控制器c
11
的控制量u
11
的计算公式:
[0087]
u
11,k
=u
11,k
‑1+δu
11,k
ꢀꢀꢀꢀꢀꢀꢀ
(15);
[0088]
u
11,,k
表示第一跟踪控制器c
11
在k时刻的控制量,下标的数字表示对应的控制器,控制增量δu
11,k
按照下式进行计算:
[0089][0090]
其中e
11,k
、e
11,k
‑1和e
11,k
‑2分别为当前时刻误差、上一时刻误差和上上时刻误差;k
p1
、t
i1
、t
d1
和t
f1
的定义同式(3)一致;u
d11
为辅助微分变量,初值u
d11,0
选择为0,具体计算公式如下:
[0091][0092]
式(15)也能写为如下形式:
[0093]
u
11,k
=u
11,k
‑1+q0e
11,k
+q1e
11,k
‑1+q2e
11,k
‑2+q3δu
d11,k
‑1ꢀꢀꢀꢀ
(18);
[0094]
式(18)中的各参数q0、q1、q2和q3分别为中间参数变量,具体计算方式如下:
[0095][0096]
(3)计算第一抗扰控制器c
12
的控制量u
12
:
[0097]
由图(3)所示的结构可以得出:进而得到偏差e
12
的计算结果:由于控制器c
11
和c
12
均采用同样的结构,其计算方式也是一致的,u
12
的计算过程可以参考u
11
。两者的区别在于输入偏差、控制器参数及内部变量的初始值,在此不再赘述。
[0098]
(4)计算第二跟踪控制器c
21
和第二抗扰控制器c
22
的控制作用u
21
和u
22
:
[0099]
第二跟踪控制器c
21
和第二抗扰控制器c
22
的结构和计算方式同第一跟踪控制器c
11
和第一抗扰控制器c
12
是一致的,都能够通过式(15)所示的结构进行。在分别确定各pid控制器的四个参数之后,相应的系数q0~q3也会被唯一确定下来,这里不再赘述。
[0100]
(5)分别计算两级控制器tc1和tc2的控制量u1和u2:
[0101]
在分别计算四个控制器c
11
、c
12
、c
21
和c
22
的控制作用输出之后,按照如下公式计算u1和u2:
[0102][0103]
其中u
11,k
、u
12,k
、u
21,k
和u
22,k
分别为控制器c
11
、c
12
、c
21
和c
22
的控制作用。
[0104]
控制系统在运行时,总体按照图2所示结构实施,具体步骤如下:
[0105]
step 1:通过系统辨识方法确定对象模型(1)和(2);
[0106]
step 2:由对象模型(1)和(2)分别确定λ1、λ2、β1和β2;
[0107]
step 3:由整定公式(4)、(6)、(8)和(10)分别确定控制器c
11
、c
12
、c
21
和c
22
的参数;
[0108]
step 4:由运行人员确定过热蒸汽温度的设定r1,并由式(11)确定二级过热器出口蒸汽温度的设定r2;
[0109]
step 5:由dcs系统获取二级过热器及三级过热器出口温度y2和y1;
[0110]
step 6:根据二级和三级过热器出口温度y2和y1按照步骤4分别计算两级控制器tc1和tc2的输出u1和u2;
[0111]
step 7:分别将两级控制器tc1和tc2的输出u1和u2输出至现场减温调节阀;
[0112]
step 8:重复step 4
‑
7。