1.本实用新型涉及消防安全技术领域,特别是涉及防爆消防侦检灭火机器人。
背景技术:
2.消防机器人作为特种机器人的一种,在消防救灾中能够发挥举足轻重的作用。随着各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加。但是在现有技术中消防机器人的功能单一,无法完成定期自主巡检,检测周边环境信息,降低安全隐患的作用。
技术实现要素:
3.本实用新型所要解决的技术问题是现有技术中消防机器人功能单一。
4.为解决上述技术问题,本实用新型采用的一个技术方案是:提供防爆消防侦检灭火机器人,包括消防机器人本体、远程遥控器和控制机体上位机软件,所述消防机器人本体包括箱体附件、主驱动装置、数据采集系统、远程喊话和5g网络传输系统,所述远程遥控器和控制机体上位机软件为基于5g网络的远程控制终端,所述箱体附件包括箱体,所述箱体上表面任意一侧位置设置有消防水炮和自喷淋装置,消防水炮安装于箱体上方,可以上下左右多角度旋转,并自带自喷淋装置,进入火场时,可给机器人本体降温,保护机体,免受高温侵害,所述箱体后部位置设置有充电插座、电源开关、电源指示灯和急停开关,所述箱体内底壁靠近消防水炮一侧固定连接有充电电池,所述箱体后部位置固定连接有脱扣机构,脱扣机构安装于水炮尾部管口处,当完成拖拽作业时,可自动脱落水带,无需手动装卸,回收水带方便快捷。
5.优选的,所述数据采集系统包括声光报警器、前置摄像头、防爆摄像云台、温湿度传感器和超声波传感器,所述远程喊话和5g网络传输系统包括音响扩音装置、图传天线、5g通讯天线、北斗天线,所述北斗天线与箱体上表面中部位置固定连接,所述图传天线和5g通讯天线位于箱体上表面远离消防水炮的两侧,所述声光报警器与箱体任意一侧侧壁固定连接,所述前置摄像头与箱体靠近消防水炮一侧侧壁固定连接,所述防爆摄像云台与箱体上表面位置固定连接,所述超声波传感器与箱体靠近消防水炮一侧固定连接。
6.优选的,所述消防水炮通过水炮驱动器控制。
7.优选的,所述摄像云台的高度大于消防水炮的高度。
8.优选的,所述箱体外壁位置固定连接有防火隔热板。
9.优选的,所述主驱动装置包括履带行走机构和主驱动电机,所述履带行走机构与箱体两侧固定连接,所述主驱动电机与箱体内底壁位置固定连接,所述箱体内底壁位于主驱动电机驱动端位置固定连接有直角减速机,所述直角减速机的动力输入端与主驱动电机的驱动端固定连接,所述直角减速机的动力输出端连接有输出轴,所述输出轴两端与履带行走机构连接,通过主驱动电机带动直角减速机旋转,从而带动连接在直角减速机输出端的输出轴旋转,进而使机器人运动。
10.优选的,所述箱体侧壁位于前置摄像头两侧位置固定连接有照明灯,通过照明灯提供光源。
11.本实用新型的有益效果如下:
12.本实用新型的有益效果是该机器人采用小型化、模块化设计、并携带有多种传感器、摄像机、消防水炮等设备。随着各种大型石油化工企业、隧道、地铁等不断增多,油品燃气、毒气泄漏爆炸、隧道、地铁坍塌等灾害隐患不断增加,消防机器人能通过自身北斗定位系统,配合5g高速网络数据传输,实现易燃易爆场所的可视化巡检,降低安全隐患,降低经济损失在消防救灾中可代替消防救援人员进入易燃易爆、有毒、缺氧、浓烟等危险灾害事故现场进行抢险救援,解决了人身安全、现场数据信息采集不足等问题。
附图说明
13.图1为本实用新型防爆消防侦检灭火机器人的主视图;
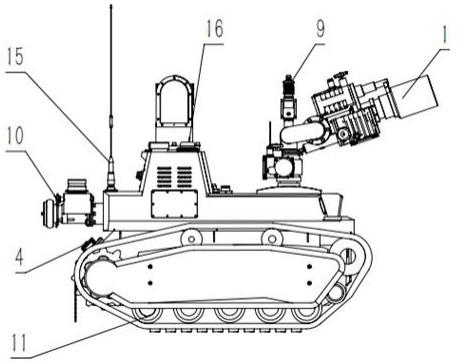
14.图2为本实用新型防爆消防侦检灭火机器人的右侧视图;
15.图3为本实用新型防爆消防侦检灭火机器人的左侧视图;
16.图4为本实用新型防爆消防侦检灭火机器人的俯剖视图。
17.图中:1、消防水炮;2、箱体;3、充电电池;4、充电插座;5、电源开关;6、急停开关;7、电源指示灯;8、照明灯;9、自喷淋装置;10、脱扣机构;11、履带行走机构;12、主驱动电机;13、直角减速机;14、输出轴;15、图传天线;16、北斗天线;17、5g通讯天线;18、声光报警器;19、前置摄像头;20、防爆摄像云台;21、防火隔热板;22、超声波传感器。
具体实施方式
18.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
19.请参阅图1,防爆消防侦检灭火机器人,包括消防机器人本体、远程遥控器和控制机体上位机软件,消防机器人本体包括箱体附件、主驱动装置、数据采集系统、远程喊话和5g网络传输系统,远程遥控器和控制机体上位机软件为基于5g网络的远程控制终端,远程遥控器和控制机体上位机软件为消防灭火侦察机器人的远程控制单元,远程遥控器上设有显示器、消防机器人本体控制摇杆、云台/水炮控制摇杆、及机器人本体各功能按钮;上位机软件可查看机器人回传的各类数据,控制机器人进行自主巡检,箱体附件包括箱体2,箱体2外壁位置固定连接有防火隔热板21,箱体2侧壁位于前置摄像头19两侧位置固定连接有照明灯8,箱体2上表面任意一侧位置设置有消防水炮1和自喷淋装置9,消防水炮1通过水炮驱动器控制,箱体2后部位置设置有充电插座4、电源开关5、电源指示灯9和急停开关6,箱体2内底壁靠近消防水炮1一侧固定连接有充电电池3,箱体2后部位置固定连接有脱扣机构10。
20.如图4示,主驱动装置包括履带行走机构11和主驱动电机12,履带行走机构11与箱体2两侧固定连接,主驱动电机12与箱体2内底壁位置固定连接,箱体2内底壁位于主驱动电机12驱动端位置固定连接有直角减速机13,直角减速机13的动力输入端与主驱动电机12的驱动端固定连接,直角减速机13的动力输出端连接有输出轴14,输出轴14两端与履带行走机构11连接。
21.如图2和图3示,数据采集系统包括声光报警器18、前置摄像头19、防爆摄像云台20、温湿度传感器和超声波传感器22,摄像云台20的高度大于消防水炮1的高度,远程喊话和5g网络传输系统包括音响扩音装置、图传天线15、5g通讯天线17、北斗天线16,北斗天线16与箱体2上表面中部位置固定连接,图传天线15和5g通讯天线17位于箱体2上表面远离消防水炮1的两侧,声光报警器18与箱体2任意一侧侧壁固定连接,前置摄像头19与箱体2靠近消防水炮1一侧侧壁固定连接,防爆摄像云台20与箱体2上表面位置固定连接,超声波传感器22与箱体2靠近消防水炮1一侧固定连接。
22.本实用新型工作原理:
23.抢险救灾时:
24.打开远程遥控器,发出指令,消防机器人本体上的图传天线15负责接收远程遥控器发来的命令,根据命令驱动消防机器人本体行走,当消防机器人本体接近事故或火灾现场时,消防机器人本体的温湿度传感器、前置摄像头19和超声波传感器22将采集到的信息回传给远程遥控器,操作人员根据现场实际情况,发出各种命令控制消防机器人本体进行灭火、侦察等工作。
25.自主巡检时:
26.打开控制机体上位机软件,通过组建局域网,下发机器人指令,根据命令驱动机器人本体行走到达巡检地点,到达地点后可从上位机软件中,查看机器人本体的温湿度传感器、前置摄像头19和超声波传感器22回传的数据,根据实际情况对机器人下发相应的工作。
27.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。