1.本发明涉及消防灭火机器人技术领域,具体为无人机与多自由度机械臂消防灭火机器人的联合消防系统。
背景技术:
2.消防灭火机器人作为特种机器人的一种,在消防救灾中能够发挥举足轻重的作用。在消防灭火救援任务执行的进程中,该装置可以精准地确定灭火工作的区域,并用最智能及最便捷的模式进行灭火救援工作,帮助灭火救援工作顺利进行,并且大大降低了消防人员执行任务的风险。但是,目前的消防灭火机器人只携带固定的喷枪,灭火高度、灭火角度受限,适用范围小。
3.另一方面,随着我国经济社人发展,高层建筑物已逐渐成为建筑的主流形式,在消防救援任务中,高层建筑物灭火任务占了很大比重。一旦在高层建筑物中出现火情,由于主体结构等原因的制约导致火势蔓延较快,并且被困人员的撤离、救援灭火等任务的实施难度比较大。其表现为由于建筑物过高,因此消防车配备的云梯不能达到实际灭火救援工作的要求,并且消防员在攀登高度方面也存在一定的限制;除此以外,高层建筑物出现火情后烟气及有毒有害气体很难及时排放,灭火用水水位和供水量也很难达到相应的要求。为此,搭载有消防灭火装备的无人机成为协助消防机器人完成消防救援的任务的首要选择,可以依靠无人机的各类功能优势来应对相应的困难。
4.城市高层发生火灾时,消防车第二喷枪射程受限,无法实施救援,此情况可通过无人机吊装第二喷枪及消防水带对高层进行灭火。由于高层火灾有燃烧物坠落风险,消防车及消防员无法接近起火建筑物正下方,无人机在飞往着火点进行灭火时既需要克服竖直方向水带及水带中液体的重量,还需要拖动水带进行水平方向移动,一般无人机无法达到这种载荷要求。
5.总结起来,现有无人机的供水方式分为两种,一种是自携水箱,依靠水箱供水,另一种是从地面拖拽水管,靠水管连接的供水设备供水。两种供水方式各有优缺点,适合于不同的场合。水箱供水的方式可以避免拖拽沉重的水管,提高无人机的灵活性,但水箱体积受机器人动力性能限制,无法搭载足量消防用水,需不断对水箱进行补水作业,影响灭火效率;拖拽水管的方式虽然能满足持续用水的需求,但在超高层建筑消防作业时,在超出消防车水泵扬程的高度,仍达不到较好的灭火效果。在森林消防作业时,无人机无法进行挂载消防水带作业。
6.因此,研发无人机与多自由度机械臂消防灭火机器人的联合消防系统,实现两种供水方式的快速切换,实现优势互补;同时针对低层的机器人灭火区域,消除灭火死角,扩大消防灭火机器人的使用范围。以解决消防工作中存在的供水不足、灭火死角多,尤其满足高质量完成高层建筑全楼层灭火的作业要求,成为十分重要的课题。
技术实现要素:
7.本发明的目的在于提供无人机与多自由度机械臂消防灭火机器人的联合消防系统,以解决上述背景技术中提出的问题。
8.无人机与多自由度机械臂消防灭火机器人的联合消防系统,其包括:
9.装载有第一供水机构的无人机;
10.安装有第二卷盘的供水车;
11.安装有第一卷盘、第二供水机构、安装座、机械臂机构的消防灭火机器人;
12.安装座上设置有转盘,机械臂机构通过转盘与安装座转动连接;
13.所述机械臂机构包括第一手臂、第二手臂、第三手臂、第一伸缩臂、第二伸缩臂、第三伸缩臂;
14.第一手臂、第二手臂、第三手臂之间通过滚轴首尾铰接;
15.第一手臂首端铰接于转盘;第三手臂末端安装有第一喷枪;
16.第一伸缩臂两端分别铰接于转盘和第一手臂;
17.第二伸缩臂两端分别铰接于第一手臂和第二手臂;
18.第三伸缩臂两端分别铰接于第二手臂、第三手臂;
19.第二卷盘上搭载有第一水管,第一卷盘上搭载第二水管;
20.第一卷盘、第二卷盘内均设置有卷簧,保持第二水管、第一水管收放过程中始终缠绕收紧。
21.第一水管首端连接供水车的供水接头,末端与第一卷盘上的第二水管的首端连接;
22.第二水管的末端选择性地连接至无人机的第一供水机构或消防灭火机器人的第二供水机构。
23.进一步,第二供水机构设置有储水装置及增压装置,增压装置设置有水管管路连接至第一喷枪;第二水管的末端可选择性地连接至储水装置,为储水装置供水。
24.进一步,增压装置连接第一喷枪的水管管路隐藏于第一手臂、第二手臂、第三手臂内部。
25.进一步,所述第一供水机构包括:
26.第二喷枪;
27.设置有若干进水口、出水口的水箱;
28.末端连接于水箱进水口的第一管路;
29.首端连接于水箱出水口、末端连接第二喷枪的第二管路;
30.首端连接于水箱出水口、末端与第二管路连接的第三管路;
31.首端与第一管路连接、末端与第二管路连接的第四管路;
32.设置于第一管路、第二管路、第三管路上的若干电磁阀;
33.第一管路、第二管路、第三管路、第四管路中,首端为水流的上游方向,末端为水流的下游方向;
34.第二水管的末端可选择性地连接至第一管路的首端,为第一供水机构供水。
35.进一步,第一管路上设置有第一电磁阀,所述第一电磁阀设置于第一管路、第四管路的连接位置的下游方向上。
36.进一步,第二管路上设置有第二电磁阀,所述第二电磁阀设置于a位置与b位置之间,所述a位置为第四管路与第二管路的连接位置,b位置为第三管路与第二管路的连接位置。
37.进一步,所述第三管路上设置有第三电磁阀与水泵。
38.进一步,所述消防灭火机器人设置有底盘,所述安装座、第二供水机构安装于底盘上;底盘上还安装有履带式行进机构。
39.进一步,所述消防灭火机器人底盘上设置有无人机定位跟踪装置,用于实时跟踪无人机的位置,保持消防灭火机器人处于无人机下方。
40.进一步,第一伸缩臂、第二伸缩臂、第三伸缩臂为液压缸,安装座内还设置有液压站,用于为第一伸缩臂、第二伸缩臂、第三伸缩臂提供动力。
41.与现有技术相比,本发明的有益效果是:
42.第一、本发明设计了用于搭载喷枪的三条机械手臂、三条伸缩臂组成的多自由度机械臂机构,机械臂机构搭载于转盘上,可以自由转动,从而实现喷枪角度的调整;三条机械手臂之间相互铰接,通过伸缩臂的伸缩实现机械手臂之间伸张程度的调整,从而实现喷枪高度的调整;通过机械臂机构可实现喷枪多自由度的喷射角度的调整。
43.第二、本发明设计了一种能够实现自携式与外接式供水方式的快速切换的联合消防系统,实现自携方式与外接方式供水的优势互补,可提供多种作业模式:在进行一般高层消防作业时,通过地面消防车通过消防水带连接第一管路首端的快插接口给第二喷枪供水,进行持续的消防作业;当第二喷枪射程无法进行正常消防作业时,由地面系统往水箱内供水,由水泵从水箱内抽水进行加压喷射,增大第二喷枪射程可继续进行消防作业;当用于小型火灾,或森林、危化区域火灾扑灭后的余火侦查扑灭时,无人机可直接利用水箱内的水,由水泵进行加压喷射。多种作业模式可通过第一电磁阀、第二电磁阀、第三电磁阀在地面实现遥控开关来实现,操作方便。
44.第三、消防灭火机器人上配备第一卷盘,第一卷盘搭载第二水管,无人机高度下降时卷盘自动卷管;消防灭火机器人配备无人机定位跟踪装置,可自动跟随无人机运动,始终处于无人机下方;另消防灭火机器人配备消防水箱自带消防用水,启动后,消防灭火机器人通过云台搭载的摄像仪寻找火源,并通过红外热像仪实时掌握现场状况,找到火源后,可通过遥控装置操纵消防水泡对准火源喷射出消防水进行灭火;行进过程中,机器人可以通过避障激光雷达实现自动避障功能;整个系统可进行人工遥控操纵,无人机、消防灭火机器人、供水车联合作业,高质量完成高层建筑灭火的作业要求。
45.第四、供水车配备第二卷盘,可根据消防灭火机器人的运动进行第一水管的收放作业,方便机器人跟随无人机进行不同方位运动。无人机位置调整时,只需克服竖直方向水带及液体重量,减小了对无人机载荷要求。
附图说明
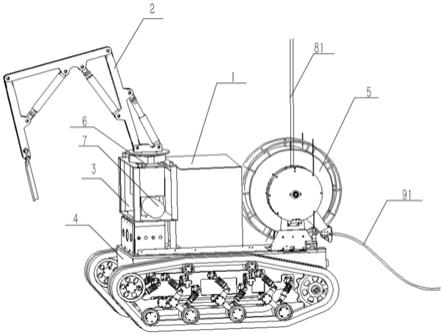
46.图1为本发明的第二水管与无人机连接时的消防灭火机器人的结构示意图;
47.图2为无人机、消防灭火机器人、供水车连接结构示意图;
48.图3为搭载有第一供水机构的无人机的结构示意图;
49.图4为第一供水机构的结构示意图;
50.图5是供水车与第二卷盘的连接结构示意图;
51.图6是第二水管与供水车连接时的消防灭火机器人的结构示意图;
52.图7是消防灭火机器人、供水车连接结构示意图;
53.图8是实施例6中机械臂结构示意图;
54.图9是实施例7中机械臂结构示意图。
55.图中:
56.第二供水机构1、机械臂机构2、第一手臂21、第二手臂22、第三手臂23、第一伸缩臂24、第二伸缩臂25、第三伸缩臂26、第一喷枪27、安装座3、底盘4、无人机定位跟踪装置401、行进机构402、第一卷盘5、转盘6、液压站7、无人机8、第一供水机构80、第一管路8021、第二管路8022、第三管路8023、第四管路8024、第一电磁阀8031、第二电磁阀8032、第三电磁阀8033、水泵804、水箱805、第二喷枪806、第二水管81、第二卷盘82、供水车9、供水接头90、第一水管91、第二卷盘92。
具体实施方式
57.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
58.请参阅图1
‑
6,本发明提供无人机与多自由度机械臂消防灭火机器人的联合消防系统,其包括装载有第一供水机构的无人机8、装载有第一卷盘5的消防灭火机器人、装载有第二卷盘92的供水车9。第二卷盘92上搭载有第一水管91,第一卷盘5上搭载第二水管81;第一水管91首端连接供水车9的供水接头90,末端与第一卷盘5上的第二水管81的首端连接。
59.消防灭火机器人设置有安装座3、第二供水机构1、底盘4。安装座3、第二供水机构1安装于底盘4上;底盘4上还安装有履带式行进机构402。一个优选方安案中,底盘4上设置有无人机定位跟踪装置401,用于实时跟踪无人机8的位置,保持消防灭火机器人处于无人机8下方。
60.安装座3上设置有转盘6,机械臂机构2通过转盘6与安装座3转动连接;所述机械臂机构2包括第一手臂21、第二手臂22、第三手臂23、第一伸缩臂24、第二伸缩臂25、第三伸缩臂26。第一手臂21、第二手臂22、第三手臂23之间通过滚轴首尾铰接;第一手臂21首端铰接于转盘6;第三手臂23末端安装有第一喷枪27;第一伸缩臂24两端分别铰接于转盘6和第一手臂21;第二伸缩臂25两端分别铰接于第一手臂21和第二手臂22;第三伸缩臂26两端分别铰接于第二手臂22、第三手臂23;第二卷盘92上搭载有第一水管91,第一卷盘5上搭载第二水管81。
61.第二供水机构1设置有储水装置及增压装置,储水装置中的水经增压装置加压后,由增压装置通过水管管路输送至第一喷枪27进行喷射灭火;第二水管81的末端连接至储水装置时,通过供水车9为储水装置供水。一个优选的方案中,增压装置连接第一喷枪27的水管管路隐藏于第一手臂21、第二手臂22、第三手臂23内部。第一伸缩臂24、第二伸缩臂25、第三伸缩臂26为液压缸,安装座3内还设置有液压站7,用于为第一伸缩臂24、第二伸缩臂25、第三伸缩臂26提供动力。
62.实施例1:
63.本实施例中,第一水管91首端连接供水车9的供水接头90,末端与第一卷盘5上的第二水管81的首端连接;消防灭火机器人在行进过程中,第二卷盘92上搭载的第一水管91、第一卷盘5上搭载的第二水管81随之收放,第一卷盘5、第二卷盘92内均设置有卷簧,保持第二水管81、第一水管91收放过程中始终缠绕收紧。
64.第二水管81的末端连接至无人机8的第一供水机构80时,供水车9为无人机8的第一供水机构80实时供水;第二水管81的末端连接至消防灭火机器人的第二供水机构1时,供水车9为消防灭火机器人的第二供水机构1实时供水。第二水管81的末端可选用快接插头,实现快速连接与拆卸。
65.实施例2:
66.第一供水机构2设置有:第二喷枪806和设置有若干进水口、出水口的水箱805。水箱805上连接有第一管路8021、第二管路8022、第三管路8023、第四管路8024,所述第一管路8021、第二管路8022、第三管路8023、第四管路8024中,首端为水流的上游方向,末端为水流的下游方向。
67.当第二水管81的末端连接第一供水机构2时,第二水管81的末端第一管路8021的首端。
68.第一管路8021的末端连接于水箱805进水口;第二管路8022首端连接于水箱805出水口、末端连接第二喷枪806;第三管路8023首端连接于水箱805出水口、末端与第二管路8022连接;第四管路8024首端与第一管路8021连接、末端与第二管路8022连接。第一管路8021、第二管路8022、第三管路8023上的若干电磁阀。具体为:
69.第一管路8021上设置有第一电磁阀8031,所述第一电磁阀8031设置于第一管路8021、第四管路8024的连接位置的下游方向上。第二管路8022上设置有第二电磁阀8032,所述第二电磁阀8032设置于a位置与b位置之间,所述a位置为第四管路8024与第二管路8022的连接位置,b位置为第三管路8023与第二管路8022的连接位置。第三管路8023上设置有第三电磁阀8033和水泵804。
70.水箱805可根据无人机结构需要设计成不同形状;水泵804由无人机直接提供动力,可在地面实现遥控开关;第一电磁阀8031、第二电磁阀8032、第三电磁阀8033可在地面实现遥控开关;第二喷枪806可遥控实现直流或雾状喷射调节。
71.实施例3:
72.本实施例中,无人负责使用第二喷枪806进行喷射灭火,第二水管81的末端连接至无人机8的第一供水机构80,机器人负责拖动水带在地面跟随无机移动,并通过第一喷枪27喷射联合灭火。消防灭火机器人上设置有无人机定位跟踪装置401以及相关的处理器和运动控制模块,无人机上安装配套的发射装置,发射装置和无人机定位跟踪装置401通信的时候,通过电磁波的飞行时间测量出无人机到消防灭火机器人的距离,通过测量微型天线阵列上相位差来计算出无人机相对消防灭火机器人的方向,将这些信息送给机器人的处理器来调整运动控制模块,从而实现对无人机的智能跟随,始终处于无人机下方。
73.消防灭火机器人上配备第一卷盘5,第一卷盘搭载第二水管81,无人机高度下降时第一卷盘自动卷管;供水车配备第二卷盘,可根据消防灭火机器人的运动进行第一水管91的收放作业,方便机器人跟随无人机进行不同方位运动。这样无人机位置调整时,只需克服
竖直方向水管及液体重量,减小了对无人机载荷要求。
74.实施例4:
75.本实施例中,水箱805的箱体上设置有连接配件,将水箱805挂载于无人机8的机架上。第二水管81的末端连接至第一供水机构80。
76.作业模式一:在进行一般高层消防作业时,第二电磁阀8032打开,第一电磁阀8031和第三电磁阀8033关闭,水泵804不工作。地面消防车通过消防水带连接第一管路8021首端的快插接口给第二喷枪806供水,进行持续的消防作业。
77.作业模式二:受消防车水泵供水高度的限制,随着无人机作业高度的增加,第二喷枪806射程逐步缩短。当第二喷枪806射程无法进行正常消防作业时,关闭第二电磁阀32,打开第一电磁阀8031和第三电磁阀8033,并启动水泵804,由地面消防车负责往水箱805内供水,由水泵804从水箱内抽水进行加压喷射,增大第二喷枪806射程可继续进行消防作业。
78.作业模式三:无人机直接利用水箱的水使用第二喷枪806进行喷射灭火,机器人通过第一喷枪27喷射联合灭火。其中,第一供水机构80关闭第二电磁阀8032和第一电磁阀8031,打开第三电磁阀8033,由水泵804进行加压喷射,此作业模式可适用于小型火灾,或森林、危化区域火灾扑灭后的余火侦查扑灭。
79.实施例5:
80.本实施例中,消防灭火机器人配备消防水箱自带消防用水,第二水管81的末端连接至第二供水机构1,为其补充水源,消防灭火机器人与无人机联合作业,无人机80采用作业模式三,完成高层灭火作业任务。
81.实施例6:
82.机械臂机构2可进行多自由度的喷射角度调整。
83.通过转盘6实现360
°
水平方向的角度调整,在垂直方向上可通过调节第一手臂21、第二手臂22、第三手臂23的伸缩长度,控制第一喷枪27的喷射高度与喷射方向。
84.本实施例中,第一伸缩臂24活塞杆伸缩长度为总行程的一半,第二手臂22活塞杆完全伸出、第三手臂23活塞杆行程为零。
85.实施例7:
86.本实施例中,第一伸缩臂24活塞杆伸缩长度为总行程的一半,第二手臂22活塞杆完全伸出、第三手臂23活塞杆完全伸出。
87.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。