1.本发明涉及一种自行走自对准的灭火机器人,属于火灾消防的技术领域。
背景技术:
2.火灾是个极其具有伤害性的事情,日常中以预防为主,一旦发生火灾,现场火势很难进入,很多火灾都是让其燃烧结束为处理方案的,放弃火灾现场的物资,避免消防人员直接冒险,此乃都是无奈之举。针对这种火灾现场,消防人员不能冒然进入现场的情况,本专利提出一种能够代替人工进入现场的机器人。
技术实现要素:
3.为了解决上述技术问题,本发明提供一种自行走自对准的灭火机器人,其具体技术方案如下:自行走行走自对准的灭火机器人,包括罐体和盖合在罐体上的罐盖,所述罐体的内部用于盛放灭火剂,所述罐体和罐盖均设置有若干个喷嘴,所述喷嘴均能够围绕其与罐体或者罐盖连接的位置上下左右转动;所述罐体和罐盖均设置有若干个明火探测器,所述明火探测器分别控制各自区域的喷嘴的开关、开度以及朝向;所述罐体的底部设置有行走机构。
4.进一步的,所述罐体的底部中心弧形下沉,所述罐体内的底部还设置有水泵,所述水泵的出水口连接总水管,所述总水管向上延伸到靠近罐盖内的顶部,所述总水管贯通若干个分支水管,所述分支水管连接到对应的喷嘴。
5.进一步的,所述喷嘴包括近喷嘴和远喷嘴,所述近喷嘴和远喷嘴为不同射程的高压喷嘴;所述近喷嘴通过近喷嘴水管连通到总水管,所述远喷嘴通过远喷嘴水管连通到总水管。
6.进一步的,每个所述近喷嘴水管和远喷嘴水管均设置有对应的阀门,所述明火探测器与对应的阀门控制连接,用于控制阀门的开关。
7.进一步的,所述行走机构包括设置在罐体底部朝向四周发射的若干个支腿,每个支腿的下方均设置一个万向轮,使得万向轮所在的圆大于罐体的圆周,且万向轮设置有电机,电机驱动其中两个相邻的万向轮,该两个万向轮公用一个中心轴,电机驱动连接该中心轴。
8.进一步的,所述罐盖与罐体锁紧密封连接,罐盖与罐体对接敞口外周均设置有朝外水平伸出的法兰11,通过螺钉穿过罐盖与罐体的法兰上的穿孔,以及在螺钉的螺杆上连接螺母固定,两个法兰之间垫有密封垫片;所述罐盖上设置有注水口,所述注水口设置有密封塞,注水口设置有朝外伸出的
连接管,连接管的开口设置朝外翻出的法兰,密封塞包括插入到连接管内部的塞体和塞体末端朝向四周发射的法兰,两个密封塞和注水口的法兰贴紧,通过螺钉穿过法兰上的穿孔,以及在螺钉的螺杆上连接螺母固定,两个法兰之间垫有密封垫片。
9.进一步的,所述电机、水泵、阀门和明火探测器均为各自的电池独立供电。
10.进一步的,所述总水管的顶部连接罐盖的内壁。
11.本发明的有益效果是:本发明使用时,将机器人放入火灾现场,机器人身上的明火探测器会感知到其与火源的距离,根据识别到的距离,自动打开朝向火源的喷嘴的阀门,关闭不朝向火源的喷嘴的阀门,进而实现精准灭火,避免罐体中的灭火剂的浪费,能够延长灭火时长。
附图说明
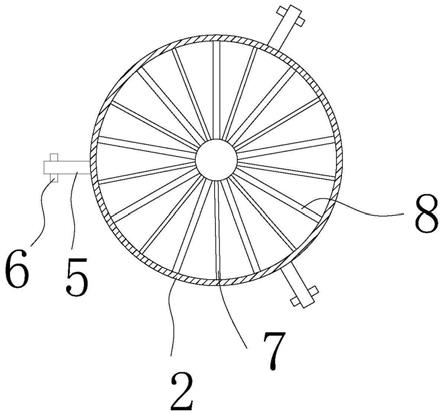
12.图1是本发明的立体图,图2是本发明的横截面俯视图,图3是本发明的纵截面图,图中: 1—罐盖,2—罐体,3—远喷嘴,4—近喷嘴,5—支脚,6—万向轮,7—近喷嘴水管,8—远喷嘴水管,9—水泵,10—总水管,11—法兰,12—密封塞,13—注水口。
具体实施方式
13.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
14.如图1所示,本种自行走自对准的灭火机器人,包括罐体2和盖合在罐体2上的罐盖1,罐体2的内部用于盛放灭火剂,罐体2和罐盖1均设置有若干个喷嘴,罐体2的底部中心弧形下沉,罐体2内的底部还设置有水泵9,水泵9的出水口连接总水管10,总水管10向上延伸到靠近罐盖1内的顶部,总水管10贯通若干个分支水管,分支水管连接到对应的喷嘴。罐体2的主要作用在于容纳灭火剂,灭火剂可选用水或者灭火泡沫,通过水泵9将灭火剂泵送到各个喷嘴,朝向机器人四周喷射灭火剂,实现灭火。
15.为了能够让机器人在现场行走,罐体2的底部设置有若干个圆周均匀分散的万向轮6。为了罐体2竖直平稳,通常在罐体2的底部设置有朝向四周发射的支腿5,万向轮6设置在支腿5的下方,使得万向轮所在的圆大于罐体的圆周。且万向轮设置有电机,电机驱动其中两个相邻的万向轮6,该两个万向轮6公用一个中心轴,电机驱动连接该中心轴,实现一个电机驱动两个万向轮同步移动。
16.如图1和图2,为了避免灭火剂无效喷射,尽量实现灭火剂喷射在火上,喷嘴设置成近喷嘴4和远喷嘴3,近喷嘴4和远喷嘴3为不同射程的高压喷嘴;通过现场控制,启动对应的近喷嘴4和远喷嘴3,实现精准喷射,防止朝向无火的区域喷射,造成灭火剂浪费。
17.近喷嘴4通过近喷嘴水管7连通到总水管10,远喷嘴3通过远喷嘴水管8连通到总水管10。罐体2的四周还设置有明火探测器,明火探测器分别控制各自区域的喷嘴,每个近喷嘴水管7和远喷嘴水管8均设置有对应的阀门,明火探测器与对应的阀门控制连接,用于控制阀门的开关。阀门可选用电磁阀。
18.如图1和图3,为了视图整洁,略去螺栓和螺母,罐盖1与罐体2锁紧密封连接,罐盖1
上设置有注水口13,注水口13设置有密封塞12。注水口设置有朝外伸出的连接管,连接管的开口设置朝外翻出的法兰,密封塞包括插入到连接管内部的塞体和塞体末端朝向四周发射的法兰,两个密封塞和注水口的法兰贴紧,通过螺钉穿过法兰上的穿孔,以及在螺钉的螺杆上连接螺母固定,两个法兰之间垫有密封垫片。罐盖1与罐体2对接敞口外周均设置有朝外水平伸出的法兰11,通过螺钉穿过法兰11上的穿孔,以及在螺钉的螺杆上连接螺母固定,两个法兰11之间垫有密封垫片。
19.电机、水泵、阀门和明火探测器均为各自的电池独立供电。防止在现场使用时,部分电源烧坏,造成整体失效。
20.总水管的顶部连接罐盖的内壁。通过总水管的顶部固定,使得总水管整体被拉直,避免总水管搭接。
21.本专利中实现喷嘴旋转的机构为申请人采购件,具体实现原理可参考专利号为cn105822632a的专利介绍。
22.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
技术特征:
1.一种自行走自对准的灭火机器人,其特征在于:包括罐体(2)和盖合在罐体(2)上的罐盖(1),所述罐体(2)的内部用于盛放灭火剂,所述罐体(2)和罐盖(1)均设置有若干个喷嘴,所述喷嘴均能够围绕其与罐体(2)或者罐盖(1)连接的位置上下左右转动;所述罐体(2)和罐盖(1)均设置有若干个明火探测器,所述明火探测器分别控制各自区域的喷嘴的开关、开度以及朝向;所述罐体(2)的底部设置有行走机构。2.根据权利要求1所述的自行走自对准的灭火机器人,其特征在于:所述罐体(2)的底部中心弧形下沉,所述罐体(2)内的底部还设置有水泵(9),所述水泵(9)的出水口连接总水管(10),所述总水管(10)向上延伸到靠近罐盖(1)内的顶部,所述总水管(10)贯通若干个分支水管,所述分支水管连接到对应的喷嘴。3.根据权利要求1所述的自行走自对准的灭火机器人,其特征在于:所述喷嘴包括近喷嘴(4)和远喷嘴(3),所述近喷嘴(4)和远喷嘴(3)为不同射程的高压喷嘴;所述近喷嘴(4)通过近喷嘴水管(7)连通到总水管(10),所述远喷嘴(3)通过远喷嘴水管(8)连通到总水管(10)。4.根据权利要求3所述的自行走自对准的灭火机器人,其特征在于:每个所述近喷嘴水管(7)和远喷嘴水管(8)均设置有对应的阀门,所述明火探测器与对应的阀门控制连接,用于控制阀门的开关。5.根据权利要求1所述的自行走自对准的灭火机器人,其特征在于:所述行走机构包括设置在罐体(2)底部朝向四周发射的若干个支腿,每个支腿的下方均设置一个万向轮(6),使得万向轮所在的圆大于罐体的圆周,且万向轮设置有电机,电机驱动其中两个相邻的万向轮,该两个万向轮公用一个中心轴,电机驱动连接该中心轴。6.根据权利要求1所述的自行走自对准的灭火机器人,其特征在于:所述罐盖(1)与罐体(2)锁紧密封连接,罐盖(1)与罐体(2)对接敞口外周均设置有朝外水平伸出的法兰,通过螺钉穿过罐盖(1)与罐体(2)的法兰上的穿孔,以及在螺钉的螺杆上连接螺母固定,两个法兰11之间垫有密封垫片;所述罐盖(1)上设置有注水口,所述注水口设置有密封塞,注水口设置有朝外伸出的连接管,连接管的开口设置朝外翻出的法兰,密封塞包括插入到连接管内部的塞体和塞体末端朝向四周发射的法兰,两个密封塞和注水口的法兰贴紧,通过螺钉穿过法兰上的穿孔,以及在螺钉的螺杆上连接螺母固定,两个法兰之间垫有密封垫片。7.根据权利要求2所述的自行走自对准的灭火机器人,其特征在于:所述电机、水泵、阀门和明火探测器均为各自的电池独立供电。8.根据权利要求2所述的自行走自对准的灭火机器人,其特征在于:所述总水管的顶部连接罐盖的内壁。
技术总结
本发明涉及一种自行走自对准的灭火机器人,包括罐体和盖合在罐体上的罐盖,所述罐体的内部用于盛放灭火剂,所述罐体和罐盖均设置有若干个喷嘴,所述喷嘴均能够围绕其与罐体或者罐盖连接的位置上下左右转动;所述罐体和罐盖均设置有若干个明火探测器,所述明火探测器分别控制各自区域的喷嘴的开关、开度以及朝向;所述罐体的底部设置有行走机构。本发明使用时,将机器人放入火灾现场,机器人身上的明火探测器会感知到其与火源的距离,根据识别到的距离,自动打开朝向火源的喷嘴的阀门,关闭不朝向火源的喷嘴的阀门,进而实现精准灭火,避免罐体中的灭火剂的浪费,能够延长灭火时长。长。长。
技术研发人员:周涛 周学龙 舒启林 鑫龙
受保护的技术使用者:扬州市邮星消防器材有限公司
技术研发日:2021.08.25
技术公布日:2021/12/10