1.本公开属于液压驱动控制技术领域,特别涉及一种用于变负载的液压控制系统。
背景技术:
2.绞车又称为卷扬机,是用卷筒缠绕钢丝绳或链条以提升或牵引重物的轻小型起重设备。在实际使用时,经常需要通过绞车的举升臂架旋转上升而将重物举升。举升臂架包括臂架和两个油缸,两个油缸对称的布置在臂架的两侧。通过两个油缸驱动臂架做圆周运动,以实现臂架的旋转上升。
3.相关技术中,油缸通过液压控制系统控制,液压控制系统一般包括动力驱动单元以及换向阀,液压油通过动力驱动单元进入到换向阀中,然后再进入到两个油缸中。通过换向阀驱动油缸匀速移动,进而实现臂架的旋转升降。
4.然而,由于臂架进行圆周运动的缘故,在油缸初始运动时负载较轻,随着举升角度越大,油缸的负载也就越大。如果油缸以一个恒定的速度运动,那么臂架运动到预定位置的时间相对较长,这样就会严重影响臂架的举升效率,进而影响绞车的工作效率。
技术实现要素:
5.本公开实施例提供了一种用于变负载的液压控制系统,可以在负载较轻时高速举升臂架,在负载较大时低速举升臂架,以便提高臂架的举升效率。所述技术方案如下:
6.本公开实施例提供了一种用于变负载的液压控制系统,所述液压控制系统包括动力输出单元、流量控制单元、举升控制单元以及执行油缸;
7.所述流量控制单元包括第一换向阀,所述第一换向阀的进油口与所述动力输出单元的出油口连通,所述第一换向阀的出油口与所述动力输出单元的进油口连通;
8.所述举升控制单元包括第一平衡阀、第二平衡阀、液控换向阀,所述第一平衡阀的第一油口与所述第一换向阀的第一工作油口连通,所述第一平衡阀的第二油口与所述执行油缸的无杆腔连通,所述第一平衡阀的控制油口与所述第一换向阀的第二工作油口连通,所述第二平衡阀的第一油口与所述第一换向阀的第二工作油口连通,所述第二平衡阀的第二油口与所述执行油缸的有杆腔连通,所述第二平衡阀的控制油口与所述执行油缸的无杆腔连通,所述液控换向阀的进油口与所述执行油缸的有杆腔连通,所述液控换向阀的出油口与所述执行油缸的无杆腔连通,所述液控换向阀的控制油口与所述第二平衡阀的第一油口连通。
9.在本公开的又一种实现方式中,所述流量控制单元还包括梭阀和压力补偿器;
10.所述梭阀的第一进油口与所述第一换向阀的第一工作油口连通,所述梭阀的第二进油口与所述第一换向阀的第二工作油口连通;
11.所述压力补偿器的进油口与所述动力输出单元的出油口连通,所述压力补偿器的出油口与所述第一换向阀的进油口连通,所述压力补偿器的控制油口与所述梭阀的工作油口连通。
12.在本公开的又一种实现方式中,所述流量控制单元还包括第一溢流阀,所述第一溢流阀的进油口与所述第一换向阀的第一工作油口连通,所述第一溢流阀的出油口与所述第一换向阀的第二工作油口连通,所述第一溢流阀的控制油口与自身的进油口连通。
13.在本公开的又一种实现方式中,所述流量控制单元还包括单向阀,
14.所述单向阀的进油口与所述动力输出单元的出油口连通,所述单向阀的出油口与所述第一换向阀的进油口连通。
15.在本公开的又一种实现方式中,所述液压控制系统还包括控压单元;
16.所述控压单元包括第二溢流阀,所述第二溢流阀的进油口与所述动力输出单元的出油口连通,所述第二溢流阀的出油口与所述动力输出单元的进油口连通,所述第二溢流阀的控制油口与自身的进油口连通。
17.在本公开的又一种实现方式中,第二溢流阀为电磁比例溢流阀。
18.在本公开的又一种实现方式中,所述控压单元还包括第二换向阀;
19.所述第二换向阀的第一油口与所述动力输出单元的出油口连通,所述第二换向阀的第二油口与所述动力输出单元的进油口连通,所述第二换向阀的第三油口与所述第二溢流阀的出油口连通。
20.在本公开的又一种实现方式中,所述动力输出单元包括电动机、主泵和油箱;
21.所述电动机用于驱动所述主泵,所述主泵的进油口与所述油箱连通。
22.在本公开的又一种实现方式中,所述动力输出单元还包括过滤器;
23.所述过滤器的进油口与所述油箱连通,所述过滤器的出油口与所述主泵的进油口连通。
24.在本公开的又一种实现方式中,所述举升控制单元为两个,所述执行油缸为两个,两个所述举升控制单元与两个所述执行油缸一一对应布置;
25.所述液压控制系统还包括分流集流阀,所述分流集流阀的第一油口与所述第一换向阀的第一工作油口连通,所述分流集流阀的两个第二油口分别与两个所述举升控制单元一一对应,所述分流集流阀的第二油口与对应的所述第一平衡阀的第一油口连通。
26.在本公开的又一种实现方式中,所述执行油缸为两个,所述举升控制单元为两个,两个所述举升单元与两个所述执行油缸一一对应布置;
27.所述液压控制系统还包括分流集流阀,所述分流集流阀的第一油口与所述第一换向阀的第一工作油口连通,所述分流集流阀的两个第二油口分别与两个所述举升控制单元一一对应,所述分流集流阀的第二油口与对应的所述第一平衡阀的第一油口连通。
28.本公开实施例提供的技术方案带来的有益效果是:
29.当使用本公开实施例提供的液压控制系统在对臂架进行驱动时,首先将执行油缸连接在臂架的两侧。然后,启动动力输出单元,使得动力输出单元输出的液压油进入到第一换向阀内。
30.当需要通过液压控制系统驱动臂架旋转上升时,需要驱动执行油缸的活塞杆伸出。此时,控制第一换向阀的阀芯左移后,阀芯位于右位,第一换向阀的进油口与第一工作油口连通,第一换向阀的出油口与第二工作油口连通。当液压油进入第一换向阀后,液压油从第一换向阀的第一工作油口进入到第一平衡阀内。第一平衡阀的阀芯处于单向阀位,液压油通过第一平衡阀的第一油口进入第一平衡阀内后,液压油从第一平衡阀的第二油口输
出,进入至执行油缸的无杆腔内,推动执行油缸的活塞杆快速伸出。
31.与此同时,由于臂架进行圆周运动,所以,在臂架初始上升时,作用在执行油缸上的负载较轻。执行油缸内无杆腔的压力大于有杆腔内的压力,也就是,pb>pa,液控换向阀的阀芯处于上位,液控换向阀的进油口与出油口连通,执行油缸中的有杆腔内的液压油进入到液控换向阀内,并通过液控换向阀的出油口进入到执行油缸的无杆腔内,以此进一步增加执行油缸的活塞杆的伸出速度,从而驱动臂架快速上升。
32.当臂架运动至负载较重状态时,执行油缸内无杆腔的压力不大于有杆腔内的压力时,也就是,pb≤pa,执行油缸中的有杆腔内的液压油不能够通过液控换向阀内流通。执行油缸中的有杆腔内的液压油进入到第二平衡阀内,第二平衡阀的控制油口处的压力(也就是执行油缸内有杆腔压力)大于第二油口处压力(也就是执行油缸内无杆腔压力),第二平衡阀的阀芯处于溢流阀位,液压油通过第二平衡阀的第二油口进入到第二平衡阀后,经过第二平衡阀的第一油口直接返回动力输出单元内,执行油缸以较低的速度运动。
33.当需要通过液压控制系统驱动臂架旋转下降时,需要驱动执行油缸的活塞杆缩回。此时,控制第一换向阀的阀芯右移后,阀芯位于左位,第一换向阀的进油口与第二工作油连通,第一换向阀的出油口与第一工作油口连通。当液压油进入第一换向阀后,液压油从第一换向阀的第二工作油口进入到第二平衡阀内。由于下降时,负载基本为,所以,执行油缸的无杆腔的压力大于有杆腔处压力,第二平衡阀的阀芯处于单向阀位。液压油通过第二平衡阀的第一油口进入第二平衡阀内后,液压油从第二平衡阀的第二油口输出,并进入至执行油缸的有杆腔内,推动执行油缸的活塞杆快速缩回。同时,液压油进入到液控换向阀的控制油口内,液控换向阀的阀芯处于下位,液控换向阀关闭。
34.执行油缸的无杆腔内的油液进入到第一平衡阀内。第一平衡阀的阀芯处于溢流阀位。当液压油进入到第一平衡阀后,经过第一平衡阀的第二油口流通至第一油口,并进入到第一换向阀内,通过第一换向阀的出油口流回动力输出单元内,保证执行油缸稳定移动,进而驱动臂架快速下降。
附图说明
35.为了更清楚地说明本公开实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本公开的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
36.图1是本公开实施例提供的臂架的工作状态图;
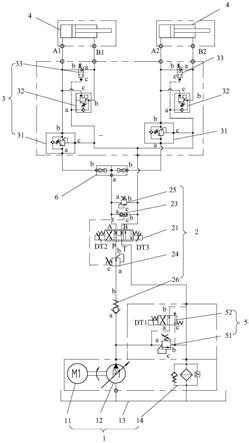
37.图2是本公开实施例提供的用于变负载的液压控制系统的原理图。
38.图中各符号表示含义如下:
39.1、动力输出单元;11、电动机;12、主泵;13、油箱;14、过滤器;
40.2、流量控制单元;21、第一换向阀;23、梭阀;24、压力补偿器;25、第一溢流阀;26、单向阀;
41.3、举升控制单元;31、第一平衡阀;32、第二平衡阀;33、液控换向阀;
42.4、执行油缸;
43.5、控压单元;51、第二溢流阀;52、第二换向阀;
44.6、分流集流阀;
45.100、臂架。
具体实施方式
46.为使本公开的目的、技术方案和优点更加清楚,下面将结合附图对本公开实施方式作进一步地详细描述。
47.为了清楚说明本公开实施例提供了的用于变负载的液压控制系统,这里优先介绍一下臂架与执行油缸的连接关系。
48.图1是本公开实施例提供的臂架的工作状态图,结合图1,臂架100的中部与执行油缸4的活塞杆相连,臂架100的端部通过转动轴与绞车的转动相连。当执行油缸4的活塞杆伸出时,臂架100以转动轴为轴线旋转上升。相反,当执行油缸4的活塞杆缩回时,臂架100以转动轴为轴线旋转下降。
49.本公开实施例提供了一种用于变负载的液压控制系统,如图1所示,液压控制系统包括动力输出单元1、流量控制单元2、举升控制单元3以及执行油缸4。
50.流量控制单元2包括第一换向阀21和分流集流阀6,第一换向阀21的进油口p与动力输出单元1的出油口连通,第一换向阀21的出油口t与动力输出单元1的进油口连通。
51.举升控制单元3包括第一平衡阀31、第二平衡阀32、液控换向阀33,第一平衡阀31的进油口a与第一换向阀21的第一工作油口a连通,第一平衡阀31的出油口b与执行油缸4的无杆腔连通,第一平衡阀31的控制油口c与第一换向阀21的第二工作油口b连通,第二平衡阀32的进油口a与第一换向阀21的第二工作油口b连通,第二平衡阀32的出油口b与执行油缸4的有杆腔连通,第二平衡阀32的控制油口c与执行油缸4的无杆腔连通,液控换向阀33的进油口a与执行油缸4的有杆腔连通,液控换向阀33的出油口b与执行油缸4的无杆腔连通,液控换向阀33的控制油口c与第二平衡阀32的进油口a连通。
52.当使用本公开实施例提供的液压控制系统在对臂架进行驱动时,首先将执行油缸4连接在臂架的两侧。然后,启动动力输出单元1,使得动力输出单元1输出的液压油进入到第一换向阀21内。
53.当需要通过液压控制系统驱动臂架旋转上升时,需要驱动执行油缸4的活塞杆伸出。此时,控制第一换向阀21的阀芯左移后,阀芯位于右位,第一换向阀21的进油口p与第一工作油口a连通,第一换向阀21的出油口t与第二工作油口b连通。当液压油进入第一换向阀21后,液压油从第一换向阀21的第一工作油口a进入到第一平衡阀31内。第一平衡阀31的阀芯处于单向阀位,液压油通过第一平衡阀31的第一油口a进入第一平衡阀31内后,液压油从第一平衡阀31的第二油口b输出,进入至执行油缸4的无杆腔内,推动执行油缸4的活塞杆快速伸出。
54.与此同时,由于臂架进行圆周运动,所以,在臂架初始上升时,作用在执行油缸4上的负载较轻。执行油缸4内无杆腔(pb)的压力大于有杆腔(pa)内的压力,也就是,pb>pa,液控换向阀33的阀芯处于上位,液控换向阀33的进油口a与出油口b连通,执行油缸4中的有杆腔内的液压油进入到液控换向阀33内,并通过液控换向阀33的出油口b进入到执行油缸4的无杆腔内,以此进一步增加执行油缸4的活塞杆的伸出速度,从而驱动臂架快速上升。
55.当臂架运动至负载较重状态时,执行油缸4内无杆腔(pb)的压力不大于有杆腔(pa)
内的压力时,也就是,pb≤pa,执行油缸4中的有杆腔内的液压油不能够通过液控换向阀33内流通。执行油缸4中的有杆腔内的液压油进入到第二平衡阀32内,第二平衡阀32的控制油口c处的压力(也就是执行油缸4内有杆腔压力pa)大于第二油口b处压力(也就是执行油缸4内无杆腔压力pb),第二平衡阀32的阀芯处于溢流阀位,液压油通过第二平衡阀32的第二油口b进入到第二平衡阀32后,经过第二平衡阀32的第一油口a直接返回动力输出单元1内,执行油缸4以较低的速度运动。
56.当需要通过液压控制系统驱动臂架旋转下降时,需要驱动执行油缸4的活塞杆缩回。此时,控制第一换向阀21的阀芯右移后,阀芯位于左位,第一换向阀21的进油口p与第二工作油b连通,第一换向阀21的出油口t与第一工作油口a连通。当液压油进入第一换向阀21后,液压油从第一换向阀21的第二工作油口b进入到第二平衡阀32内。由于下降时,负载基本为0,所以,执行油缸4的无杆腔(pb)的压力大于有杆腔(pa)处压力,第二平衡阀32的阀芯处于单向阀位。液压油通过第二平衡阀32的第一油口a进入第二平衡阀32内后,液压油从第二平衡阀32的第二油口b输出,并进入至执行油缸4的有杆腔内,推动执行油缸4的活塞杆快速缩回。同时,液压油进入到液控换向阀33的控制油口c内,液控换向阀33的阀芯处于下位,液控换向阀33关闭。
57.执行油缸4的无杆腔内的油液进入到第一平衡阀31内。第一平衡阀31的阀芯处于溢流阀位。当液压油进入到第一平衡阀31后,经过第一平衡阀31的第二油口b流通至第一油口a,并进入到第一换向阀21内,通过第一换向阀21的出油口t流回动力输出单元1内,保证执行油缸4稳定移动,进而驱动臂架快速下降。
58.可选地,执行油缸4为两个,举升控制单元3为两个,两个举升控制单元3与两个执行油缸4一一对应布置。
59.液压控制系统还包括分流集流阀6,分流集流阀6的第一油口a与第一换向阀21的第一工作油口a连通,分流集流阀6的两个第二油口b分别与两个举升控制单元3一一对应,分流集流阀6的第二油口b与对应的第一平衡阀31的第一油口a连通。
60.在上述实现方式中,通过分流集流阀6能够将第一换向阀21的输出的液压有分成两组,分别进入到两个举升控制单元内,进而驱动两个执行油缸4的伸出。
61.本实施例中,第二平衡阀32选用3:1的导压比的平衡阀。假设第二平衡阀32内的弹簧的压力值为p
弹簧
,执行油缸4的负载为f
负载
。当臂架旋转上升时,进入到执行油缸4的无杆腔内a口(包括图2中的a1、a2)的压力值为pa,执行油缸4的有杆腔内b口(包括图2中的b1、b2)的压力值为pb,则pa×
sa=f
负载
+pb×
sb,pa×
3+pb×
1=p
弹簧
。由于臂架在圆周方向运动,刚开始工作时负载较轻。在负载较轻时,pb>pa,高压油通过液控换向阀33再次进入到执行油缸4的无杆腔内a1或者a2口,从而构成差动回路,增加执行油缸4的运动速度。当臂架运动至负载较重状态时,pb≤pa,执行油缸4的无杆腔内a口液压油直接返回动力输出单元1,油缸以较低的速度运动。
62.继续参见图1,可选地,动力输出单元1包括电动机11、主泵12和油箱13。电动机11用于驱动主泵12,主泵12的进油口与油箱13连通。主泵12的出油口与第一换向阀21的第一油口a连通。
63.在上述实现方式中,电动机11用于驱动主泵12进行转动。油箱13用于为整个液压控制系统提供动力液压油。主泵12用于为液压控制系统泵送动力液压油,以便使得执行油
缸4内能够充入液压油,最终能够使得平台在该液压控制系统的驱动下进行平稳升降。
64.示例性地,主泵12为变量泵。
65.将主泵12设置为变量泵,能够使得主泵12在转速恒定的情况下,输出的流量进行调控,即主泵12的转速选定后,对应的输出流量也可以发生变化,使得主泵12的输出流量能够根据液压控制系统的实际需求进行改变,进而确保平台在升降时,能够保持稳定。
66.可选地,动力输出单元还包括过滤器14,过滤器14设置在油箱13与第一换向阀21之间,过滤器14的进油口与第一换向阀21的出油口t连通,过滤器14的出油口与油箱13的进油口连通。
67.在上述实现方式中,过滤器14的增加可以提高液压控制系统的使用安全性,避免杂质进入油箱13中,进而在主泵12的驱动下再次进入到整个油路,影响各个阀件的使用,同时也避免影响执行油缸4的正常使用。
68.本实施例中,为了使得油箱13中的液压油能够满足实际使用的温度需求,通常在油箱13的侧壁布置温度计,以便通过温度计能够实时观察到该油箱13中的温度是否满足实际需求。
69.同样的道理,为了确保油箱13中的油量能够满足实际使用的需求,通常在油箱13的侧壁也布置液位计,以便通过液位计能够实时观察到该油箱13中的液压油的深度,以此确定油箱13中液压油的体积。
70.可选地,流量控制单元2还包括梭阀23和压力补偿器24。梭阀23的第一进油口a与第一换向阀21的第一工作油口a连通,梭阀23的第二进油口b与第一换向阀21的第二工作油口b连通。
71.压力补偿器24的进油口a与动力输出单元1的出油口连通,压力补偿器24的出油口b与第一换向阀21的进油口p连通,压力补偿器24的第一控制油口c与梭阀23的工作油口c连通,压力补偿器24的第二控制油口d与自身的出油口b连通。
72.在上述实现方式中,由于压力补偿器24中的出油口b的压力等于压力补偿器24内弹簧的压力值与第一控制油口c的压力值。所以,当设置压力补偿器24和梭阀23后,压力补偿器24中的出油口b的压力等于第一换向阀21的进油口p的压力。而梭阀23的工作油口c与压力补偿器24中的第一控制油口c连通,所以,压力补偿器24中的第一控制油口c的压力等于第一换向阀21的第一工作油口a或者第二工作油口b的压力较大的值。也就是说,压力补偿器24中的第一控制油口c的压力等于第一换向阀21的出口处的压力,这样,就是可以使得第一换向阀21的进口处的压力与出口处的压力之间的差值为压力补偿器24中的弹簧的压力,即第一换向阀21的进口处的压力与出口处的压力保持恒定,使得第一换向阀21不会受到流量和负载波动的影响,从而实现第一换向阀21的流量精确的控制。
73.可选地,流量控制单元2还包括第一溢流阀25,第一溢流阀25的进油口a与第一换向阀21的第一工作油口a连通,第一溢流阀25的出油口b与第一换向阀21的第二工作油口b连通,第一溢流阀25的控制油口c与自身的进油口连通。
74.在上述实现方式中,由于第一溢流阀25的进油口a与第一换向阀21的第一工作油口a连通,第二溢流阀51的控制油口c与自身的进油口a连通,所以当第一溢流阀25内的进油口处的压力低于第一溢流阀25的弹簧腔内的压力,第一溢流阀25不打开。当第一溢流阀25内的进油口处的压力高于第一溢流阀25的弹簧腔内的压力,第一溢流阀25打开,这样便可
以使得进入到执行油缸4的无杆腔内的压力不至于过高,在执行油缸4超载时溢流。
75.可选地,流量控制单元2还包括单向阀26,单向阀26的进油口与动力输出单元1的出油口连通,单向阀26的出油口与第一换向阀21的进油口p连通。
76.在上述实现方式中,单向阀26用于限制动力输出单元1的出油口与第一换向阀21的进油口p之间的油路的流向,即通过单向阀26的设定,使得从动力输出单元1的出油口流出的液压油只能够单向输入至第一换向阀21的进油口p,而不能反向流通,以此提高该液压控制系统的安全性。
77.可选地,液压控制系统还包括控压单元5。控压单元5包括第二溢流阀51,第二溢流阀51的进油口a与动力输出单元1的出油口连通,第二溢流阀51的出油口b与动力输出单元1的进油口连通,第二溢流阀51的控制油口c与自身的进油口a连通。
78.在上述实现方式中,控压单元5用于控制整个液压控制系统的压力。由于第二溢流阀51的进油口a与动力输出单元1的出油口连通,第二溢流阀51的控制油口c与自身的进油口a连通,所以当第二溢流阀51内的进油口处的压力低于第二溢流阀51的弹簧腔内的压力,第二溢流阀51不打开。当第二溢流阀51内的进油口处的压力高于第二溢流阀51的弹簧腔内的压力,第二溢流阀51打开,这样便可以通过改变第二溢流阀51的弹簧腔内的压力,来控制动力输出单元1的出油口的压力,进而调整动力输出单元1的输出压力。
79.可选地,第二溢流阀51为电磁比例溢流阀。
80.在上述实现方式中,第二溢流阀51为电磁电比例溢流阀,可以通过调整第二溢流阀51的进口大小,就可以自动调整第二溢流阀51的弹簧腔内的压力,进而调整动力输出单元1的输出压力。
81.可选地,控压单元5还包括第二换向阀52。第二换向阀52的第一油口a与动力输出单元1的出油口连通,第二换向阀52的第二油口b与动力输出单元1的进油口连通,第二换向阀52的第三油口c与第二溢流阀51的出油口b连通。
82.在上述实现方式中,第二换向阀52用于与第二溢流阀51配合,以便能够调整动力输出单元1的输出压力。
83.使用时,动力输出单元1向第一换向阀21输入液压油时,可以先控制第二换向阀52的左侧的电磁铁失电时,动力输出单元1空载。
84.当第二换向阀52的左侧的电磁铁得电时,动力输出单元1空载加载,通过第二溢流阀51控制该液压控制系统的工作压力,以便使得该液压控制系统能够输出不同的压力。
85.本实施例中,第二换向阀52为二位四通电磁换向阀。
86.可选地,液压控制系统还包括控制器,控制器与第一换向阀21、第二换向阀52、第二溢流阀51等电连接。
87.在上述实现方式中,通过控制器能够自动控制第一换向阀21、第二换向阀52、第二溢流阀51等的工作状态,提高工作效率。
88.下面简单介绍一下本公开实施例提供的液压控制系统对臂架驱动的工作过程:
89.首先,将两个执行油缸4对称的连接在臂架的两侧,然后,启动动力输出单元1,使得动力输出单元1输出的液压油进入到第一换向阀21内。
90.接着,当臂架需要上升时,此时,控制第一换向阀21,使得右侧的电磁铁得电,第一换向阀21的阀芯左移后,阀芯位于右位,第一换向阀21的进油口p与第一工作油口a连通,第
一换向阀21的出油口t与第二工作油口b连通,这样液压油从第一换向阀21的进油口p流向第一工作油口a,然后进入到分流集流阀6的第一油口a中,通过分流集流阀6的两个第二油口b分别进入到对应的第一平衡阀31的进油口a中,并通过第一平衡阀31的出油口b进入到两个执行油缸4的无杆腔内。对应的,两个执行油缸4的活塞杆右移。此时,由于臂架在圆周方向运动,所以,在臂架初始上升时,作用在执行油缸4上的负载较轻。执行油缸4内无杆腔的压力大于有杆腔内的压力也就是,pb>pa,执行油缸4中的有杆腔内的液压油通过液控换向阀33进入到执行油缸4的无杆腔内,增加执行油缸4的运动速度,从而驱动臂架快速上升。当臂架运动至负载较重状态时,执行油缸4内无杆腔的压力不大于有杆腔内的压力时,也就是,pb≤pa,执行油缸4中的有杆腔内的液压油不在通过液控换向阀33进入到无杆腔内,而是通过第二平衡阀32直接返回动力输出单元1内,执行油缸4油缸以较低的速度运动。
91.然后,当臂架需要下降时,此时,控制第一换向阀21,使得左侧的电磁铁得电,第一换向阀21的阀芯右移后,阀芯位于左位,第一换向阀21的进油口p与第二工作油b连通,第一换向阀21的出油口t与第一工作油口a连通,这样液压油从第一换向阀21的进油口p流向第二工作油口b,然后进入到对应的第二平衡阀32的进油口a中,再进入到对应的执行油缸4的有杆腔内,同时液压油将对应的液控换向阀33关闭。两个执行油缸4的活塞杆左移,执行油缸4的无杆腔内的油液进入到对应的第一平衡阀31内,经过第一平衡阀31保证执行油缸4稳定移动,进而驱动臂架快速下降。
92.以上所述仅为本公开的可选实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。