1.本实用新型涉及玻璃制造技术领域,具体涉及一种插片机。
背景技术:
2.目前,在玻璃化学强化业内,将玻璃片转移到玻璃篮具的过程中,玻璃的插片一般由人工来完成的。但是,在上述的工作流程中,人工操作强度大,同时转移过程中,烤盘温度高且质量大,人工搬运效率低且不安全。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种插片机,使用所述插片机可以实现对片状物料的全自动转移,无需人工过多参与,从而降低了人工的操作强度,提高了生产过程中的安全性,有利于提高玻璃生产过程中的效率,与自动化程度。
4.为解决上述技术问题,实用新型所采用的技术方案是一种插片机,包括:
5.用于起支撑作用的安装架;
6.线性驱动模组,所述线性驱动模组安装在安装架的顶端,用于提供水平移动的动力;
7.第一机械抓手,所述第一机械抓手安装在所述线性驱动模组的一侧,用于片状物料的一次夹取;
8.第二机械抓手,所述第二机械抓手安装在所述线性驱动模组的另一侧,用于片状物料的二次夹取。
9.通过采用上述技术方案的插片机,第一机械抓手对将片状物料抓送至定位平台进行定位,第二机械抓手对定位平台上的片状物料进行抓取,并进行角度变化后,输送至缓存线放置,第一机械抓手与、第二机械转手在水平方向的动力均来自线性驱动模组,从而取消人工搬运的情况,具有提高工作效率,降低人工操作强度的优点,有利于提高片状物料的转移流程效率。
10.本实用新型提供的插片机中,所述第一机械抓手包括有安装在线性驱动模组一侧的升降单元与调距单元,所述调距单元位于升降单元的底端,所述升降单元包括有第一气缸与升降板,所述第一气缸位于升降板的一侧,且第一气缸的输出端与升降板固定连接。如此,通过第一机械抓手上的升降单元,可对的物料进行上下移动。
11.本实用新型提供的插片机中,所述调距单元包括有固定安装在升降板底端的固定板,所述固定板的底端滑动连接有滑动板,所述固定板上安装有输出端与滑动板相连的第二气缸,所述固定板的底端与滑动板的底端分别安装有第一吸盘与第二吸盘。如此,通过第一机械抓手上的调距单元,可适用于不同大小的片状物料。
12.本实用新型提供的插片机中,所述第二机械抓手包括有安装在线性驱动模组另一侧的第一电机,所述第一电机的输出端连接有第一齿轮,所述第一齿轮的一侧啮合有第一齿条,所述第一齿条的底端连接有第一翻转机构,所述第一翻转机构的底端安装有第二翻
转机构。如此,通过第二机械抓手上的第一电机、第一齿轮与第一齿条,可实现片状物料二次抓取时的上下移动。
13.本实用新型提供的插片机中,所述第一翻转机构包括有被固定安装的第三气缸,所述第三气缸的输出端连接有连接板,所述连接板的一端连接有第二齿条,所述第二齿条的一侧啮合有第二齿轮。如此,通过第二机械抓手上的第一翻转机构,可实现片状物料的第一次九十度翻转。
14.本实用新型提供的插片机中,所述第二翻转机构包括有被固定安装的第四气缸,所述第四气缸的输出端连接有第三齿条,所述第三齿条的一侧啮合有第三齿轮,所述第三齿轮的外壁连接有第三吸盘。如此,通过第二机械抓手上的第二翻转机构,可实现片状物料的第二次九十度翻转。
15.综上所述,实施本实用新型提供的插片机,可以达到至少以下有益效果:所述插片机,包括:用于起支撑作用的安装架;线性驱动模组,所述线性驱动模组安装在安装架的顶端,用于提供水平移动的动力;第一机械抓手,所述第一机械抓手安装在所述线性驱动模组的一侧,用于片状物料的一次夹取;第二机械抓手,所述第二机械抓手安装在所述线性驱动模组的另一侧,用于片状物料的二次夹取。实现了对片状物料的全自动转移,无需人工过多参与,从而降低了人工的操作强度,提高了生产过程中的安全性,有利于提高玻璃生产过程中的效率,与自动化程度。
附图说明
16.为了更清楚地说明实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是实用新型的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图:
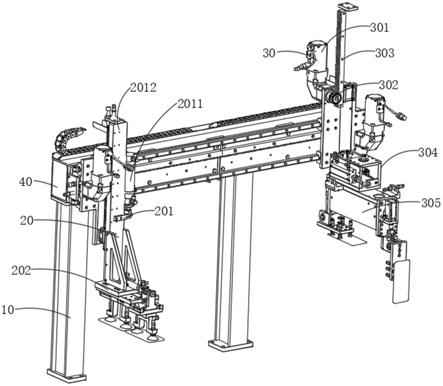
17.图1为本实施例提供的插片机的立体结构示意图;
18.图2为本实施例提供的插片机的正视示意图;
19.图3为本实施例提供的粉料容器的立体结构示意图;
20.图4为本实施例提供的第一翻转机构的立体结构示意图;
21.图5为本实施例提供的第二翻转机构的立体结构示意图。
22.具体实施方式中的附图标号说明:
[0023][0024]
具体实施方式
[0025]
为了便于理解实用新型,下面将参照相关附图对实用新型进行更全面的描述。附图中给出了实用新型的典型实施例。但是,实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施例。相反地,提供这些实施例的目的是使对实用新型的公开内容更加透彻全面。
[0026]
除非另有定义,本文所使用的所有的技术和科学术语与属于实用新型的技术领域的技术人员通常理解的含义相同。本文中在实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制实用新型。
[0027]
本实施例提供了一种插片机。参见图1,图1为本实施例提供的插片机的立体结构示意图,如图1所示,包括:用于起支撑作用的安装架10;线性驱动模组40,所述线性驱动模组40安装在安装架10的顶端,用于提供水平移动的动力;第一机械抓手20,所述第一机械抓手20安装在所述线性驱动模组 40的一侧,用于片状物料的一次夹取;第二机械抓手30,所述第二机械抓手 30安装在所述线性驱动模组40的另一侧,用于片状物料的二次夹取。应当理解的是,在使用所述插片机时,可将所述线性驱动模组40布置在安装架10 的顶端,以使所述第一机械抓手20与第二机械抓手30顺着线性驱动模组40 进行移动。在这里,线性驱动模组40为双驱动机构,即:每一个机构单独驱动一个所述机械抓手进行移动。在使用所述插片机对片状物料进行移动时,先由所述第一机械抓手20对片状物料进行抓取并由定位平台进行定位,然后所述第二机械抓手30移动至定位平台正上方,对定位后的片状物料进行二次抓取,并带动其进行二次翻转,实现片状物料的位置变化,如此,实现了取消人工搬运的情况,具有提高工作效率,降低人工操作强度的优点,有利于提高片状物料的转移流程效率。
[0028]
参见图1和图2,所述第一机械抓手20包括有安装在线性驱动模组40一侧的升降单元201与调距单元202,所述调距单元202位于升降单元201的底端,所述升降单元201包括有第一气缸2011与升降板2012,所述第一气缸2011 位于升降板2012的一侧,且第一气缸2011的输出端与升降板2012固定连接。如此,通过第一机械抓手上20的升降单元201,可对的物料进行上下移动。所述调距单元202包括有固定安装在升降板2012底端的固定板2021,所述固定板2021的底端滑动连接有滑动板2022,所述固定板2021上安装有输出端与滑动板2022相连的第二气缸2023,所述固定板2021的底端与滑动板2022 的底端分别安装有第一吸盘2024与第二吸盘2025,如此,通过第一机械抓手 20上的调距单元202,可适用于不同大小的片状物料,在对片状物料进行一次抓取时,先通过第二气缸2023的运行,带动滑动板2022进行移动,直至第一吸盘2024与第二吸盘2025之间的间距适合被抓取的片状物料之后,通过第一气缸2011运行,第一气缸2011的输出端带动升降板2012向下移动,升降板 2012带动调距单元202整体下移,从而对片状物料进行一次夹取。
[0029]
参见图2、图4与图5,所述第二机械抓手30包括有安装在线性驱动模组 40另一侧的第一电机301,所述第一电机301的输出端连接有第一齿轮302,所述第一齿轮302的一侧啮合有第一齿条303,所述第一齿条303的底端连接有第一翻转机构304,所述第一翻转机构304的底端安装有第二翻转机构305。如此,通过第二机械抓手30上的第一电机301、第一齿轮302与第一齿条303,可实现片状物料二次抓取时的上下移动。如此,通过第二机械抓手30上的第一翻转机构304,可实现片状物料的第一次九十度翻转;所述第一翻转机构304 包括有被固定安装的第三气缸3041,所述第三气缸3041的输出端连接有连接板3042,所述连接板3042的一端连接有第二齿条3043,所述第二齿条3043的一侧啮合有第二齿轮3044;所述第二翻转机构305包括有被固定安装的第四气缸3051,所述第四气缸3051 的输出端连接有第三齿条3052,所述第三齿条3052的一侧啮合有第三齿轮 3053,所述第三齿轮3053的外壁连接有第三吸盘3054。如此,通过第二机械抓手30上的第二翻转机构305,可实现片状物料的第二次九十度翻转。在第二机械抓手30对片状物料进行二次夹持后,首先第一翻转机构304运行带动连接板3042进行移动,连接板3042在移动过程中带动第二齿轮3044转动,第二齿轮3044转动,即可带动其两端转轴转动,从而实现第一次的九十度偏转,之后第四气缸3051运行,第四气缸3051运行带动第三齿条3052移动,第三齿条3052移动过程中带动第三齿轮3053转动,第三齿轮3053即可带动第三吸盘3054进行位置调整,对片状物料进行第二次的位置调整,之后即可将偏转物料转移至缓存线上。
[0030]
上面结合附图对实用新型的实施例进行了描述,但是实用新型并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在实用新型的启示下,在不脱离实用新型宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于实用新型的保护之内。