1.本发明属于车辆视觉影像领域。
背景技术:
2.智能辅助驾驶的小轿车在堵车的场景下,当汽车本体的正后方尾随大货车时,由于尾随大货车的距离非常近,而且大货车体型宽大,尾随的大货车会遮挡住汽车尾部的视觉影像防追尾摄像头的视线范围,这时汽车本体的侧后方就会出现视觉影像防追尾摄像头的视觉盲区,从而使汽车的智能辅助驾驶系统和驾驶员缺乏能否变道的判断依据。
技术实现要素:
3.发明目的:为了克服现有技术中存在的不足,本发明提供一种基于视觉影像的车辆防追尾系统,为智能辅助驾驶系统或驾驶员提供是否变道的判断依据。
4.技术方案:为实现上述目的,本发明的基于视觉影像的车辆防追尾系统,包括汽车本体,所述汽车本体的尾部安装有视觉影像防追尾摄像头;
5.所述汽车本体的后视镜壳体内安装有主动避险相机和相机弹出机构;当汽车本体的后方车辆遮挡所述视觉影像防追尾摄像头的视线范围时,所述后视镜壳体内的相机弹出机构能将所述主动避险相机向汽车本体的侧方弹出,使弹出的所述主动避险相机能拍摄到侧后方的视觉影像防追尾摄像头的视野盲区。
6.进一步的,所述后视镜壳体远离后视镜片的一侧沿长度方向设置有横向摇臂槽;
7.所述相机弹出机构包括横向摇臂槽内固定安装的竖向铰接轴,所述竖向铰接轴处于横向摇臂槽远离汽车本体一端的位置;所述相机弹出机构还包括横向摇臂,所述横向摇臂平行于所述横向摇臂槽内;所述横向摇臂的一端设置有竖向的铰接轴穿过孔,所述竖向铰接轴同轴心活动穿过所述铰接轴穿过孔,从而使横向摇臂能沿所述竖向铰接轴摆动;所述主动避险相机固定安装在所述横向摇臂的另一端;当横向摇臂平行于所述横向摇臂槽内时,所述主动避险相机的镜头朝向汽车本体的前方。
8.进一步的,所述竖向铰接轴的上下部分均同轴心套有扭力弹簧,各所述扭力弹簧的一端固定连接所述横向摇臂,另一端固定连接所述横向摇臂槽的槽侧壁;所述扭力弹簧对所述横向摇臂始终施加一个俯视视角下为顺时针方向的扭力;所述横向摇臂槽内还安装有摇臂冲击装置,所述摇臂冲击装置能冲击所述横向摇臂,使横向摇臂克服扭力弹簧的扭力并沿铰接轴逆时针摆动。
9.进一步的,所述横向摇臂的中段背离镜头的一侧设置有冲击斜面,所述摇臂冲击装置包括固定在横向摇臂槽内靠近汽车本体一端的电磁伸缩器;
10.所述电磁伸缩器的伸缩杆与所述横向摇臂槽的长度方向平行,所述伸缩杆末端固定连接有冲击滚轮座,所述冲击滚轮做上转动安装有冲击滚轮,所述冲击滚轮的轴线与竖向方向平行;所述伸缩杆缩回状态时,所述冲击滚轮与所述冲击斜面之间存在间距,所述伸缩杆的伸出运动能带动所述冲击滚轮冲击所述冲击斜面,从而使横向摇臂克服扭力弹簧的
扭力并沿铰接轴逆时针摆动。
11.进一步的,所述横向摇臂靠近铰接轴穿过孔的一端上侧设置有圆弧槽,所述圆弧槽的圆弧圆心在所述铰接轴穿过孔的轴线上;
12.横向摇臂平行于所述横向摇臂槽内的基础上,横向摇臂沿铰接轴逆时针摆动180
°
后,所述圆弧槽的正上方槽侧壁处设置有竖向的销柱通道,销柱通道内同轴心设置有液压限位销柱,所述液压限位销柱外壁的活塞环与销柱通道内壁滑动密封配合;所述液压限位销柱的向下运动能刚好插入所述圆弧槽沿长度方向的中部;
13.所述横向摇臂槽远离汽车本体一端的槽底面处设置有缓冲球限位孔,所述缓冲球限位孔的内侧同轴心连通有柱状缓冲球活动腔,所述柱状缓冲球活动腔远离缓冲球限位孔的一端同轴心连通有连接杆穿过孔,所述连接杆穿过孔远离柱状缓冲球活动腔的一端同轴心连通有活塞腔,所述活塞腔内有活塞,所述柱状缓冲球活动腔内有缓冲球,所述缓冲球的直径大于所述缓冲球限位孔的内径;所述缓冲球通过连接杆同轴心连接所述活塞,所述缓冲球远离连接杆的一部分在缓冲球限位孔处向外突出;所述视镜壳体的内部还设置有被液压油填充的液压油通道,所述液压油通道的一端连通所述销柱通道的上端,所述液压油通道的另一端连通所述活塞腔远离连接杆穿过孔的一端;
14.横向摇臂靠近主动避险相机的镜头一侧面记为按压面,横向摇臂平行于所述横向摇臂槽内的基础上,横向摇臂沿铰接轴逆时针摆动180
°
后,所述按压面会将缓冲球在缓冲球限位孔处向外突出的一部分向内按压到柱状缓冲球活动腔内,从而在连接杆的带动下使活塞做远离连接杆穿过孔的运动,所述活塞做远离连接杆穿过孔的运动会在液压油通道的液压传动下带动所述液压限位销柱向下插入所述圆弧槽的沿长度方向的中部。
15.进一步的,还包括固定安装的推顶器,所述推顶器的推顶杆同轴心于所述活塞腔内,所述推顶杆的伸出能顶到所述活塞远离连接杆穿过孔的一侧面,从而带动活塞做逐渐靠近连接杆穿过孔的运动。
16.进一步的,所述活塞腔的内径大于所述销柱通道的内径;所述销柱通道的下端设置有限位内缘。
17.进一步的,汽车正常行驶的场景下,在扭力弹簧顺时针方向的扭力作用下,横向摇臂平行于横向摇臂槽内,使横向摇臂为隐藏状态,这时主动避险相机也隐藏于横向摇臂槽内靠近汽车本体的一端,从而不会额外增加汽车整体的宽度区间,且这时主动避险相机的镜头是向前的;初始状态下缓冲球远离连接杆的一部分在缓冲球限位孔处向外突出,液压限位销柱处于向上缩回的状态,与此同时冲击滚轮与冲击斜面之间存在间距;推顶器的推顶杆也处于缩回的状态;
18.在堵车的场景下,当汽车本体的正后方尾随大货车时,由于尾随大货车的距离近,而且体型宽大,尾随的大货车会遮挡住汽车本体尾部的视觉影像防追尾摄像头的视线范围,这时汽车本体的侧后方就会出现视觉影像防追尾摄像头的视觉盲区,从而使汽车的智能辅助驾驶系统和驾驶员缺乏能否变道的判断依据;
19.这时启动电磁伸缩器,使伸缩杆快速伸出,进而带动冲击滚轮冲击横向摇臂的冲击斜面,通过控制电磁伸缩器的功率使冲击滚轮冲击横向摇臂的冲击斜面时的瞬时速度超过m/s;从而使横向摇臂在冲击滚轮的冲击下克服扭力弹簧的扭力并迅速沿铰接轴逆时针摆动,当横向摇臂沿铰接轴逆时针摆动
°
时停止逆时针方向摆动,这时已经实现了横向摇臂
和主动避险相机的弹出,横向摇臂沿铰接轴逆时针摆动180
°
时,横向摇臂上的按压面会将缓冲球在缓冲球限位孔处向外突出的一部分向内按压到柱状缓冲球活动腔内,从而在连接杆的带动下使活塞做远离连接杆穿过孔的运动,活塞做远离连接杆穿过孔的运动会在液压油通道的液压传动下带动所述液压限位销柱向下插入所述圆弧槽的沿长度方向的中部,这时横向摇臂在扭力弹簧顺时针方向的扭力作用下沿铰接轴轴线顺时针摆动,由于这时液压限位销柱已经向下插入圆弧槽中了,因此当向下插入圆弧槽中的液压限位销柱接触到圆弧槽逆时针端时,横向摇臂会因液压限位销柱的限位而不会继续沿铰接轴轴线顺时针摆动,进而实现了对已经弹出的横向摇臂和主动避险相机的定位,这时缓冲球限位孔处自动留出了一定的空间;这时随横向摇臂弹出的主动避险相机的镜头是朝向斜后方的,从而使弹出的主动避险相机拍摄到侧后方的视觉影像防追尾摄像头的视野盲区;为智能辅助驾驶系统或驾驶员提供是否变道的判断依据;
20.弹出的主动避险相机拍摄到侧后方的视觉影像防追尾摄像头的视野盲区后为了不干扰其他车辆的行驶,需要将已经弹出的主动避险相机收回到横向摇臂槽内;
21.这时,控制推顶器的推顶杆伸出并顶压活塞远离连接杆穿过孔的一侧面,进而带动活塞做逐渐靠近连接杆穿过孔的运动,活塞做逐渐靠近连接杆穿过孔的运动会在液压油通道的液压传动下带动液压限位销柱向上运动,从而使液压限位销柱向上脱离圆弧槽,横向摇臂失去了液压限位销柱的约束后,在扭力弹簧顺时针方向的扭力作用下沿铰接轴轴线顺时针摆动,直至横向摇臂重新平行于横向摇臂槽内,回到正常行驶的场景。
22.有益效果:本发明的随横向摇臂弹出的主动避险相机的镜头是朝向斜后方的,从而使弹出的主动避险相机拍摄到侧后方的视觉影像防追尾摄像头的视野盲区;为智能辅助驾驶系统或驾驶员提供是否变道的判断依据。
附图说明
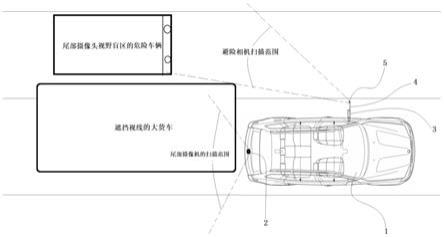
23.附图1为汽车尾部的视觉影像防追尾摄像头的视线范围被尾随的大货车会遮挡的示意图;
24.附图2为附图1的后视镜处的放大示意图(主动避险相机已经弹出);
25.附图3为附图2的立体示意图;
26.附图4为横向摇臂和主动避险相机均隐藏横向摇臂槽内时的后视镜壳体立体剖视图;
27.附图5为附图3的另一视角示意图(横向摇臂沿铰接轴逆时针摆动180
°
后的示意图);
28.附图6为附图5的基础上,向下插入圆弧槽中的液压限位销柱接触到圆弧槽逆时针端时的状态;
29.附图7为附图4的俯视图;
30.附图8为附图7的基础上,横向摇臂逆时针摆动的过程中的示意图;
31.附图9为附图7的基础上,横向摇臂沿铰接轴逆时针摆动180
°
时的状态;
32.附图10为附图9的基础上向下插入圆弧槽中的液压限位销柱接触到圆弧槽逆时针端时的状态;
33.附图11为铰接轴处的局部剖视图;
34.附图12为横向摇臂拆卸示意图;
35.附图13为横向摇臂结构示意图;
36.附图14为本装置的液压油通道处的剖视图;
37.附图15为附图14的标记23处的放大第一状态示意图(缓冲球在缓冲球限位孔处向外突出的一部分还没有被按压的状态);
38.附图16为附图14的标记23处的放大第二状态示意图(缓冲球限位孔处向外突出的一部分已经被按压面按压的状态);
39.附图17为附图14的标记23处的放大第三状态示意图(向下插入圆弧槽中的液压限位销柱接触到圆弧槽逆时针端时的状态)。
具体实施方式
40.下面结合附图对本发明作更进一步的说明。
41.如附图1至17所示的基于视觉影像的车辆防追尾系统,包括汽车本体1,汽车本体1的尾部安装有视觉影像防追尾摄像头2;
42.汽车本体1的后视镜壳体3内安装有主动避险相机5和相机弹出机构;如图1,当汽车本体1的后方车辆遮挡视觉影像防追尾摄像头2的视线范围时,后视镜壳体3内的相机弹出机构能将主动避险相机5向汽车本体1的侧方弹出,使弹出的主动避险相机5能拍摄到侧后方的视觉影像防追尾摄像头2的视野盲区。
43.后视镜壳体3远离后视镜片6的一侧沿长度方向设置有横向摇臂槽8;
44.相机弹出机构包括横向摇臂槽8内固定安装的竖向铰接轴12,竖向铰接轴12处于横向摇臂槽8远离汽车本体1一端的位置;相机弹出机构还包括横向摇臂4,横向摇臂4平行于横向摇臂槽8内;横向摇臂4的一端设置有竖向的铰接轴穿过孔14,竖向铰接轴12同轴心活动穿过铰接轴穿过孔14,从而使横向摇臂4能沿竖向铰接轴12摆动;主动避险相机5固定安装在横向摇臂4的另一端;当横向摇臂4平行于横向摇臂槽8内时,主动避险相机5的镜头5.1朝向汽车本体1的前方。
45.竖向铰接轴12的上下部分均同轴心套有扭力弹簧13,各扭力弹簧13的一端固定连接横向摇臂4,另一端固定连接横向摇臂槽8的槽侧壁8.2;扭力弹簧13对横向摇臂4始终施加一个俯视视角下为顺时针方向的扭力;横向摇臂槽8内还安装有摇臂冲击装置,摇臂冲击装置能冲击横向摇臂4,使横向摇臂4克服扭力弹簧13的扭力并沿铰接轴12逆时针摆动。
46.横向摇臂4的中段背离镜头5.1的一侧设置有冲击斜面18,摇臂冲击装置包括固定在横向摇臂槽8内靠近汽车本体1一端的电磁伸缩器19;
47.电磁伸缩器19的伸缩杆20与横向摇臂槽8的长度方向平行,伸缩杆20末端固定连接有冲击滚轮座21,冲击滚轮做21上转动安装有冲击滚轮22,冲击滚轮的轴线与竖向方向平行;伸缩杆20缩回状态时,冲击滚轮22与冲击斜面18之间存在间距,伸缩杆20的伸出运动能带动冲击滚轮22冲击冲击斜面18,从而使横向摇臂4克服扭力弹簧13的扭力并沿铰接轴12逆时针摆动。
48.横向摇臂4靠近铰接轴穿过孔14的一端上侧设置有圆弧槽9,圆弧槽9的圆弧圆心在铰接轴穿过孔14的轴线上;
49.横向摇臂4平行于横向摇臂槽8内的基础上,横向摇臂4沿铰接轴12逆时针摆动
180
°
后,圆弧槽9的正上方槽侧壁8.2处设置有竖向的销柱通道31,销柱通道31内同轴心设置有液压限位销柱10,液压限位销柱10外壁的活塞环30与销柱通道31内壁滑动密封配合;液压限位销柱10的向下运动能刚好插入圆弧槽9沿长度方向的中部;
50.横向摇臂槽8远离汽车本体1一端的槽底面8.1处设置有缓冲球限位孔16,缓冲球限位孔16的内侧同轴心连通有柱状缓冲球活动腔38,柱状缓冲球活动腔38远离缓冲球限位孔16的一端同轴心连通有连接杆穿过孔32,连接杆穿过孔32远离柱状缓冲球活动腔38的一端同轴心连通有活塞腔36,活塞腔36内有活塞33,柱状缓冲球活动腔38内有缓冲球15,缓冲球15的直径大于缓冲球限位孔16的内径;缓冲球15通过连接杆37同轴心连接活塞33,缓冲球15远离连接杆37的一部分在缓冲球限位孔16处向外突出;视镜壳体3的内部还设置有被液压油填充的液压油通道24,液压油通道24的一端连通销柱通道31的上端,液压油通道24的另一端连通活塞腔36远离连接杆穿过孔32的一端;
51.横向摇臂4靠近主动避险相机5的镜头5.1一侧面记为按压面4.1,横向摇臂4平行于横向摇臂槽8内的基础上,横向摇臂4沿铰接轴12逆时针摆动180
°
后,按压面4.1会将缓冲球15在缓冲球限位孔16处向外突出的一部分向内按压到柱状缓冲球活动腔38内,从而在连接杆37的带动下使活塞33做远离连接杆穿过孔32的运动,活塞33做远离连接杆穿过孔32的运动会在液压油通道24的液压传动下带动液压限位销柱10向下插入圆弧槽9的沿长度方向的中部。
52.还包括固定安装的推顶器34,推顶器34的推顶杆35同轴心于活塞腔36内,推顶杆35的伸出能顶到活塞33远离连接杆穿过孔32的一侧面,从而带动活塞33做逐渐靠近连接杆穿过孔32的运动。
53.活塞腔36的内径大于销柱通道31的内径;销柱通道31的下端设置有限位内缘0000。
54.本方案的具体工作过程如下:
55.汽车正常行驶的场景下,如图4和图7,在扭力弹簧13顺时针方向的扭力作用下,横向摇臂4平行于横向摇臂槽8内,使横向摇臂4为隐藏状态,这时主动避险相机5也隐藏于横向摇臂槽8内靠近汽车本体1的一端,从而不会额外增加汽车整体的宽度区间,且这时主动避险相机5的镜头5.1是向前的;初始状态下缓冲球15远离连接杆37的一部分在缓冲球限位孔16处向外突出,液压限位销柱10处于向上缩回的状态,与此同时冲击滚轮22与冲击斜面18之间存在间距;推顶器34的推顶杆35也处于缩回的状态;
56.如图1,在堵车的场景下,当汽车本体1的正后方尾随大货车时,由于尾随大货车的距离近,而且体型宽大,尾随的大货车会遮挡住汽车本体1尾部的视觉影像防追尾摄像头2的视线范围,这时汽车本体1的侧后方就会出现视觉影像防追尾摄像头2的视觉盲区,从而使汽车的智能辅助驾驶系统和驾驶员缺乏能否变道的判断依据;
57.这时启动电磁伸缩器19,使伸缩杆20快速伸出,进而带动冲击滚轮22冲击横向摇臂4的冲击斜面18,通过控制电磁伸缩器19的功率使冲击滚轮22冲击横向摇臂4的冲击斜面18时的瞬时速度超过2m/s;从而使横向摇臂4在冲击滚轮22的冲击下克服扭力弹簧13的扭力并迅速沿铰接轴12逆时针摆动,当横向摇臂4沿铰接轴12逆时针摆动180
°
时停止逆时针方向摆动,如图8,这时已经实现了横向摇臂4和主动避险相机5的弹出,横向摇臂4沿铰接轴12逆时针摆动180
°
时,如图9,横向摇臂4上的按压面4.1会将缓冲球15在缓冲球限位孔16处
向外突出的一部分向内按压到柱状缓冲球活动腔38内,如图10和16,从而在连接杆37的带动下使活塞33做远离连接杆穿过孔32的运动,活塞33做远离连接杆穿过孔32的运动会在液压油通道24的液压传动下带动液压限位销柱10向下插入圆弧槽9的沿长度方向的中部,如图9和图16,这时横向摇臂4在扭力弹簧13顺时针方向的扭力作用下沿铰接轴12轴线顺时针摆动,由于这时液压限位销柱10已经向下插入圆弧槽9中了,因此当向下插入圆弧槽9中的液压限位销柱10接触到圆弧槽9逆时针端时,如图10和图17,横向摇臂4会因液压限位销柱10的限位而不会继续沿铰接轴12轴线顺时针摆动,进而实现了对已经弹出的横向摇臂4和主动避险相机5的定位,此时按压面4.1与槽底面8.1变为不平行,,这时缓冲球限位孔16处自动留出了一定的空间000;这时随横向摇臂4弹出的主动避险相机5的镜头5.1是朝向斜后方的,从而使弹出的主动避险相机5拍摄到侧后方的视觉影像防追尾摄像头2的视野盲区;为智能辅助驾驶系统或驾驶员提供是否变道的判断依据;
58.弹出的主动避险相机5拍摄到侧后方的视觉影像防追尾摄像头2的视野盲区后为了不干扰其他车辆的行驶,需要将已经弹出的主动避险相机5收回到横向摇臂槽8内;
59.这时,控制推顶器34的推顶杆35伸出并顶压活塞33远离连接杆穿过孔32的一侧面,进而带动活塞33做逐渐靠近连接杆穿过孔32的运动,活塞33做逐渐靠近连接杆穿过孔32的运动会在液压油通道24的液压传动下带动液压限位销柱10向上运动,从而使液压限位销柱10向上脱离圆弧槽9,横向摇臂4失去了液压限位销柱10的约束后,在扭力弹簧13顺时针方向的扭力作用下沿铰接轴12轴线顺时针摆动,直至横向摇臂4重新平行于横向摇臂槽8内,回到正常行驶的场景。
60.以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。