1.本发明涉及自动驾驶技术领域,具体地说是一种电动方向盘电机驱动控制器的实现方法。
背景技术:
2.随着车辆无人驾驶技术的蓬勃发展和先进控制系统的研制,人们对舵机整体工作性能的要求越来越高,促使了舵机向着体积质量不断减小、承载能力不断增强、控制性能不断提高的方向发展。舵机是车辆无人驾驶方向盘控制系统的重要执行机构,其性能的优劣直接影响到车辆控制系统的动态品质,由于舵机具有简单可靠、工艺性好、使用维护方便、能源单一、成本低廉、易于控制等优势受到了广泛关注和深入研究,广泛应用于车辆控制系统领域。
3.目前市场应用的自动驾驶方向盘都是采用液压原理来驱动转向液压泵,实现车轮的转动,液压方案安装会改动整个车辆的液压油路,更改原车的结构,对后期车辆售后保修造成很大困难,并且安装非常麻烦,应市场需求,出现了电动方向盘,车载原装电瓶供电,无需改变原车结构,只需方向盘下方安装个驱动电机即可,但是如何通过驱动电机运转控制电动方向盘的高精度动作,进而实现自动驾驶是目前亟待解决的技术问题。
技术实现要素:
4.本发明的技术任务是提供一种电动方向盘电机驱动控制器的实现方法,来解决如何通过驱动电机运转控制电动方向盘的高精度动作,进而实现自动驾驶的问题。
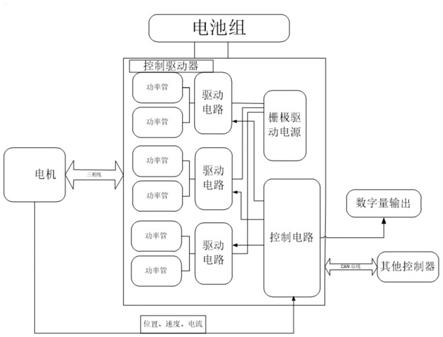
5.本发明的技术效果是按以下方式实现的,一种电动方向盘电机驱动控制器的实现方法,该方法是主控芯片dsp通过数字通讯总线向电动方向盘电机控制驱动器发送指令,电动方向盘电机控制驱动器中的控制电路接收到该指令,并根据当前永磁同步电机的电流、速度及位置信息采用永磁同步电机磁场定向矢量控制系统计算永磁同步电机三相电压,再通过pwm信号输出。电动方向盘电机控制驱动器中的栅极驱动电源为驱动电路供电,驱动电路将pwm信号放大,用以驱动电动方向盘电机控制驱动器中的功率管mosfet,实现低噪音、高效率能量转换。
6.其中,电动方向盘电机控制驱动器(mcu)通过can通讯电路与运动控制器进行数据传输,电池组为电动方向盘电机控制驱动器供电。
7.更优地,所述永磁同步电机磁场定向矢量控制系统具体如下:
8.(一)、通过电流传感器测量逆变器输出的定子电流ia、ib,经过主控芯片dsp的a/d转换器转换成数字量,并计算出ic,公式如下:
9.ic=-(ia+ib)。
10.(二)、通过clarke变换和park变换将电流ia、ib、ic变换成旋转坐标系中的直流分量i
sq
、i
sd
,i
sq
、i
sd
作为电流环的负反馈量。
11.(三)、利用直线光栅尺测量电动机的机械位移θm,并将其转换成电角度θe和速度n。
其中,电角度θe用于参与park变换和逆变换的计算。速度n作为速度环的负反馈量。
12.(四)、给定速度n
ref
与速度反馈量n的偏差经过速度pi调节器,其输出作为用于转矩控制的电流q轴参考分量i
sqref
。
13.(五)、i
sqref
和i
sdref
(等于零)与电流反馈量i
sa
、i
sd
的偏差经过电流pi调节器分别输出odq旋转坐标系的相电压分量v
sqref
和v
sdref
。
14.六、v
sqref
和v
sdref
再通过park逆变换转换式oαβ直角坐标系的定子相电压矢量的分量v
saref
和v
sbref
。
15.(七)、当定子相电压矢量的分量v
sares
、v
sbref
和其所在的扇区数已知时,利用电压空间矢量svpwm技术产生pwm控制信号来控制逆变器。
16.更优地,所述电动方向盘电机控制驱动器采用电源变换电路供电,电源变换电路包括母线电压转+5v、12v电源模块以及5v转3.3v电源模块。母线电压通过dc/dc变换芯片变换为+5v、12v电源模块,再用电压转换芯片由5v转3.3v。
17.其中,3.3v用于主控芯片dsp及其外围电路供电。
18.+5v用于can通讯电路通信及电流采用及处理电路供电。
19.12v用于驱动电路的供电。
20.更优地,所述电流采用及处理电路采用acs712电流传感器ic,acs712电流传感器ic通过霍尔效应,检测电流的大小,输出一个以2.5v为基准的电压值,vout的电压值通过高精度电阻分压,经过二极管后,进入到主控芯片dsp的ad采集引脚进行ad转换,二极管起到保护作用。
21.更优地,所述电动方向盘电机控制驱动器内设有电流保护电路,电流保护电路在永磁同步电机绕组中的电流峰值超出功率管mosfet的额定电流时,即达到比较器lm339的设定值时,输出低电平信号fault信号给故障综合电路,触发产生高电平给三态输出总线接收器,动作输出关断信号,使功率开关关断,从而保护了功率开关管,以免受到损坏。
22.更优地,所述can通讯电路采用高速实时总线,给电动方向盘电机控制驱动器发出位置、速度给定,控制永磁同步电机的转动,实现车辆车轮的运动功能,具体为:
23.根据一个车辆车轮或多个车辆车轮所需要的运动,由上位机根据运动学解算得出车辆车轮上各个永磁同步电机的实时运行速度和位置,实时性要求很高,并将实时数据通过高速实时总线传送给相应的永磁同步电机。
24.更优地,所述can通讯电路采用ti生产的型号为sn65hvd230作为局域网的接收和发送芯片,sn65hvd230的供电电源为3.3v。
25.can通讯电路采用tvs(双向瞬态电压抑制器)作为can总线保护器,用以保护和容错,使can通讯电路中的can收发器免受emi和esd的影响。
26.can通讯电路中的二极管采用双向配置,防止长电缆系统因共模电压失调而对正常的数据线路信号造成的钳位。
27.更优地,所述主控芯片dsp初始化具体如下:
28.(1)、主控芯片dsp的主程序启动。
29.(2)、系统初始化。
30.(3)、清除保护、错误数据。
31.(4)、硬件初始化。
32.(5)、功能模块初始化:包括pwm模块初始化、ad转换初始化、中断模块初始化、sci模块初始化、can模块初始化及i/o口模块初始化。
33.(6)、启动直线光栅尺功能。
34.(7)、检测、定义相电流零点。
35.(8)、电机动子位置初始化。
36.(9)、初始化计算机功能变量。
37.(10)、使能中断。
38.(11)、判断是否等待中断。
39.更优地,所述永磁同步电机磁场定向矢量控制系统包括定时器下溢中断子模块,定时器下溢中断子模块具体如下:
40.s1、保护现场。
41.s2、电流采样。
42.s3、位置差采样。
43.s4、数字滤波。
44.s5、计算动子位置。
45.s6、刷新sci通讯数据。
46.s7、刷新can通讯电路通讯数据:
47.s8、判断是否外闭环:
48.①
、若是,则执行步骤s9。
49.②
、如否,则跳转至步骤s11。
50.s9、位置pid控制。
51.s10、速度pi控制。
52.s11、相电流处理。
53.s12、clarke变换。
54.s13、求sin、cos值。
55.s14、park变换。
56.s15、q轴电流pi调节。
57.s16、d轴电流pi调节。
58.s17、park逆变换。
59.s18、求取扇区。
60.s19、求取t0、t1和t2。
61.s20、pwm比较器更新数据。
62.更优的,所述的永磁同步电机轴向充磁,并且在动子上装有三个霍尔元件,三个所述霍尔元件之间间隔半个极距,所述霍尔元件的部与动子线圈接触,所述永磁同步电机定子绕组为三相绕组,定子极距与动子永磁体极距相等。所述的动子位置计算包括以下步骤:
63.s5-1:将线性霍尔元件上输出的信号经过一个压控电压源低通滤波器进行过滤。
64.s5-2:在两路滤波器的输入端前面分别加入利用差分式电路实现减法运算的减法器,调整信号的中心位置与幅值。
65.s5-3:在两路低通滤波器的输出端再各加入一个同相输入求和运算电路,用来调
节低通滤波器输出信号的幅值与中心位置。
66.s5-4:由线性霍尔元件采得并且经过处理的三路信号通入dsp进行计算,通过计算得出直线电机动子的绝对位置;当动子正向运动,-sin信号与电机u相反电势同步,如果动子反向运动,+sin信号与u相反电势同步。
67.s5-5:将测得的正、余弦曲线和动子电压采样校准,确保这两者的起点相同。
68.s5-5:通过正余弦值sin(θ)、cos(θ)计算出动子现有的相对位置对应的角度θ,再把角度转换成相对位置,加上由安装在电机定子两侧的霍尔接近开关获得的绝对位置就可以得到动子运动过程中的绝对位置。其中角度和相对位置的转换关系如下所示:
[0069][0070]
其中s为相对位置。θ为计算得出的角度。τ为极距。n为周期数。
[0071]
更优地,所述步骤s10中速度pi控制具体如下:
[0072]
s10-1、速度pi调节。
[0073]
s10-2、读取速度给定n
*
。
[0074]
s10-3、计算偏差e(kt)=n
*-n。
[0075]
s10-4、计算n
p
(kt)=kp[e(kt)-e(kt-t)]。
[0076]
s10-5、计算ni(kt)=kie(kt)。
[0077]
s10-6、计算δ(kt)=n
p
(kt)+ni(kt)。
[0078]
s10-7、处理防积分饱和。
[0079]
s10-8、根据n(kt)给出q轴电流给定i
q*
。
[0080]
所述步骤s15中q轴电流pi调节具体如下:
[0081]
s15-1、q轴电流pi调节。
[0082]
s15-2、读取电流给定i
q*
。
[0083]
s15-3、计算偏差e(kt)=i
q*-iq。
[0084]
s15-4、计算i
p
(kt)=kp[e(kt)-e(kt-t)]。
[0085]
s15-5、计算ii(kt)=kie(kt)。
[0086]
s15-6、计算δ(kt)=i
p
(kt)+ii(kt)。
[0087]
s15-7、处理防积分饱和。
[0088]
s15-8、根据i(kt)给出q轴电压给定v
q*
。所述步骤s16中d轴电流pi调节具体如下:
[0089]
s16-1、d轴电流pi调节。
[0090]
s16-2、读取电流给定i
d*
。
[0091]
s16-3、计算偏差e(kt)=i
d*-id。
[0092]
s16-4、计算i
p
(kt)=kp[e(kt)-e(kt-t)]。
[0093]
s16-5、计算ii(kt)=kie(kt)。
[0094]
s16-6、计算δ(kt)=i
p
(kt)+ii(kt)。
[0095]
s16-7、处理防积分饱和。
[0096]
s16-8、根据i(kt)给出q轴电压给定v
d*
。
[0097]
所述步骤s18中求取扇区具体如下:
[0098]
s18-1、计算扇区。
[0099]
s18-2、扇区p=0。
[0100]
s18-3、p1=sign(vsβ)。
[0101]
s18-4、p2=2sign[sin60
°
vsα-sin30
°
vsβ]。
[0102]
s18-5、p3=4sign[-sin60
°
vsα-sin30
°
vsβ]。
[0103]
s18-6、p=p1+p2+p3。
[0104]
s18-7、查表确定扇区sector。
[0105]
所述步骤s20中pwm比较器更新数据具体如下:
[0106]
s20-1、计算svpwm。
[0107]
s20-2、读取扇区号sector。
[0108]
s20-3、查表读逆阵表,计算c0、c1和c2。
[0109]
s20-4、计算t1=0.5c1。
[0110]
s20-5、计算t2=0.5c2。
[0111]
s20-6、计算t0=0.25c0。
[0112]
s20-7、计算pwm比较器值。
[0113]
s20-8、更新pwm比较器值。
[0114]
本发明的电动方向盘电机驱动控制器的实现方法具有以下优点:
[0115]
(1)本发明采用dsp作为主控芯片,实现电机控制算法,选用功率mosfet作为功率器件,实现低噪音、高效率能量转换。
[0116]
(2)本发明采用先进的矢量控制算法,实现控制器对电机转矩、转速的精确控制,完善的欠压、过压、过流等保护功能,提升了系统的可靠性。
[0117]
(3)本发明采用can通讯电路与其他或者运动控制器进行数据传输,提高了数据的传输速率、灵活性、可靠性。
[0118]
(4)本发明通过控制算法使线性霍尔达到了编码器的效果,对成本和结构安装都有很大的创新。
[0119]
(5)本发明采用永磁同步电机作为车辆无人驾驶控制系统的执行机构以提高系统的动态响应性能和控制精确度。其中,永磁同步电中设置霍尔元件,对动子位置进行精确计算。
附图说明
[0120]
图1为永磁同步电机控制驱动器的示意图。
[0121]
图2为电源变换原理框图。
[0122]
图3为电压转换电路原理图。
[0123]
图4为电流采样及处理电路原理图。
[0124]
图5为电流保护电路原理图。
[0125]
图6为can通讯电路原理图。
[0126]
图7为dsp系统初始化流程流程图。
[0127]
图8为永磁同步电机磁场定向矢量控制系统的示意图。
[0128]
图9为定时器下溢中断子模块的流程框图。
[0129]
图10为求取扇区的流程框图。
[0130]
图11为pwm比较器更新数据的路程框图。
[0131]
图12为速度pi控制的流程框图。
[0132]
图13为q轴电流调节的流程框图。
[0133]
图14为d轴电流调节的流程框图。
[0134]
图15为永磁直线同步电机的结构示意图。
[0135]
图16为压控电压源低通滤波器的电路图。
[0136]
图17为差分式电路图。
[0137]
图18为同相输入求和运算电路图。
[0138]
图19为位置测量信号软件流程图。
[0139]
图20为反电动势信号图。
具体实施方式
[0140]
参照说明书附图和具体实施例对本发明的电动方向盘电机驱动控制器的实现方法作以下详细地说明。
[0141]
实施例:如附图1所示,本发明的电动方向盘电机驱动控制器的实现方法,该方法是主控芯片dsp通过数字通讯总线向电动方向盘电机控制驱动器发送指令,电动方向盘电机控制驱动器中的控制电路接收到该指令,并根据当前永磁同步电机的电流、速度及位置信息采用永磁同步电机磁场定向矢量控制系统计算永磁同步电机三相电压,再通过pwm信号输出,电动方向盘电机控制驱动器中的栅极驱动电源为驱动电路供电,驱动电路将pwm信号放大,用以驱动电动方向盘电机控制驱动器中的功率管mosfet,实现低噪音、高效率能量转换,其中,电动方向盘电机控制驱动器(mcu)通过can通讯电路与运动控制器进行数据传输,电池组为电动方向盘电机控制驱动器供电。
[0142]
典型的舵机永磁同步电机控制驱动器主要由功率管桥式电路、功率管驱动电路、栅极驱动电源和控制电路以及通讯等组成。
[0143]
本实施例中的电动方向盘电机控制驱动器采用电源变换电路供电,电源变换电路包括母线电压转+5v、12v电源模块以及5v转3.3v电源模块,母线电压通过dc/dc变换芯片变换为+5v、12v电源模块,再用电压转换芯片由5v转3.3v,如附图2所示,其中,3.3v用于主控芯片dsp及其外围电路供电,+5v用于can通讯电路通信及电流采用及处理电路供电,12v用于驱动电路的供电。
[0144]
其中,3.3v为dsp28035提供io口和核心供电,本发明选择芯片ld1117adt33tr,为dsp28035提供符合要求的电源电压,如附图3所示的电压转换电路。
[0145]
本实施例中的电流采用及处理电路采用acs712电流传感器ic,acs712电流传感器ic是工业、商业和通信系统交直流传感的精确经济的解决方案,小型封装非常适合空间狭小的应用,由于减少了电路板的面积,还降低了成本,典型应用领域包括电动机控制、载荷检测和管理、开关式电源和过电流故障保护。
[0146]
该器件具有精确的、低偏移线性霍尔传感器电路,并在晶片表面附近设有铜传导通路,通过该铜传导通路的应用电流能够生成可被集成霍尔ic感应并转化为成比例电压的磁场。通过磁场与霍尔传感器的靠近来优化器件的精确度,精确的比例电压由低偏置的稳定斩波bicmos霍尔ic提供,该ic包括allegro的专利数字温度补偿装置,可以实现基于温度
的超精确性能。
[0147]
通过一次铜导体路径(从引脚1和2至引脚3和4)的电流增加时,该器件的输出具有正斜率,该路径用于电流感测,此传导路径内部电阻的典型值是0.65mω(采用lcsoic8封装)以及0.85mω(采用masoic16w封装),两者均具有低功耗特性。
[0148]
传导路径的端子与传感器引线采用电气隔离,由此可在高电平电流传感应用场合使用acs712电流传感器,而且无需使用高电平侧差分放大器或其他昂贵的隔离技术,这一点对电机控制尤为适合。
[0149]
acs712电流传感器ic通过霍尔效应,检测电流的大小,输出一个以2.5v为基准的电压值,vout的电压值通过高精度电阻分压。经过二极管后,进入到主控芯片dsp的ad采集引脚进行ad转换,二极管起到保护作用,如附图4所示。
[0150]
本实施例中的电动方向盘电机控制驱动器内设有电流保护电路,电流保护就是过流保护,防止电流过大损坏元件而设计的,实现电路如图5所示,电流保护电路在永磁同步电机绕组中的电流峰值超出功率管mosfet的额定电流时,即达到比较器lm339的设定值时,输出低电平信号fault信号给故障综合电路,触发产生高电平给三态输出总线接收器,动作输出关断信号,使功率开关关断,从而保护了功率开关管,以免功率器件受到损坏。
[0151]
本实施例中的can通讯电路采用高速实时总线,给电动方向盘电机控制驱动器发出位置、速度给定,控制永磁同步电机的转动,实现车辆车轮的运动功能,具体为:
[0152]
根据一个车辆车轮或多个车辆车轮所需要的运动,由上位机根据运动学解算得出车辆车轮上各个永磁同步电机的实时运行速度和位置,实时性要求很高,并将实时数据通过高速实时总线传送给相应的永磁同步电机。
[0153]
由于上位机的can口输出的都是差分信号,而dsp在通讯上却采用的是ttl电平,因此在上位机与dsp的通讯中,存在着电平转换问题。为了解决这个问题,can通讯电路采用ti生产的型号为sn65hvd230作为局域网的接收和发送芯片,此芯片具有以下特性:
[0154]
(1)能够具有1mbaud的传输速度。
[0155]
(2)总线具有保护瞬变的功能、可以减少频率的干扰。
[0156]
(3)抗emi(电磁干扰)的能力强。
[0157]
(4)热保护、对电池和地的短路保护。
[0158]
(5)可连接110多个节点。
[0159]
sn65hvd230的供电电源为3.3v,sn65hvd230的供电也为3.3v,保证了主控芯片和can芯片的电气连接,确保了整个电路的稳定、可靠。如附图6所示,can通讯电路采用tvs(双向瞬态电压抑制器)作为can总线保护器,用以保护和容错,使can通讯电路中的can收发器免受emi和esd的影响,can通讯电路中的二极管采用双向配置,防止长电缆系统因共模电压失调而对正常的数据线路信号造成的钳位。
[0160]
本实施例中的主控芯片dsp初始化包括机器频率、功能模块使能、看门狗设置等等,清除功率保护错误是由于硬件设计有欠压等保护,保护信号产生硬件中断并使相应pwm输出引脚置为高阻态,所以程序运行前应先清除功率保护错误信号,测量偏差电流是为了计算出测量电流的真实值,因为系统采用的a/d转换器是单极的,但是实测的电流转换信号是有符号的,所以在硬件部份由相关电路将有符号电流值转换成无符号电流值,在程序里面又需将无符号值变换成有符号的定子电流输出值,这就需要测量偏差电流,即要得到零
电流时候的a/d采样值,再将每次a/d采样值减去偏差电流a/d采样值,便可得到有符号的真实电流值,如附图7所示,主控芯片dsp初始化具体如下:
[0161]
(1)、主控芯片dsp的主程序启动。
[0162]
(2)、系统初始化。
[0163]
(3)、清除保护、错误数据。
[0164]
(4)、硬件初始化。
[0165]
(5)、功能模块初始化:包括pwm模块初始化、ad转换初始化、中断模块初始化、sci模块初始化、can模块初始化及i/o口模块初始化。
[0166]
(6)、启动直线光栅尺功能。
[0167]
(7)、检测、定义相电流零点。
[0168]
(8)、电机动子位置初始化。
[0169]
(9)、初始化计算机功能变量。
[0170]
(10)、使能中断。
[0171]
(11)、判断是否等待中断。
[0172]
如附图8所示,永磁同步电机磁场定向矢量控制系统具体如下:
[0173]
(一)、通过电流传感器测量逆变器输出的定子电流ia、ib,经过主控芯片dsp的a/d转换器转换成数字量,并计算出ic,公式如下:
[0174]
ic=-(ia+ib)。
[0175]
(二)、通过clarke变换和park变换将电流ia、ib、ic变换成旋转坐标系中的直流分量i
sq
、i
sd
,i
sq
、i
sd
作为电流环的负反馈量。
[0176]
(三)、利用直线光栅尺测量电动机的机械位移θm,并将其转换成电角度θe和速度n。其中,电角度θe用于参与park变换和逆变换的计算。速度n作为速度环的负反馈量。
[0177]
(四)、给定速度n
ref
与速度反馈量n的偏差经过速度pi调节器,其输出作为用于转矩控制的电流q轴参考分量i
sqref
。
[0178]
(五)、i
sqref
和i
sdref
(等于零)与电流反馈量i
sa
、i
sd
的偏差经过电流pi调节器分别输出odq旋转坐标系的相电压分量v
sqref
和v
sdref
。
[0179]
六、v
sqref
和v
sdref
再通过park逆变换转换式oαβ直角坐标系的定子相电压矢量的分量v
saref
和v
sbref
。
[0180]
(七)、当定子相电压矢量的分量v
sares
、v
sbref
和其所在的扇区数已知时,利用电压空间矢量svpwm技术产生pwm控制信号来控制逆变器。
[0181]
如附图9所示,本实施例中的永磁同步电机磁场定向矢量控制系统包括定时器下溢中断子模块,定时器下溢中断子模块具体如下:
[0182]
s1、保护现场。
[0183]
s2、电流采样。
[0184]
s3、位置差采样。
[0185]
s4、数字滤波。
[0186]
s5、计算动子位置。
[0187]
s6、刷新sci通讯数据。
[0188]
s7、刷新can通讯电路通讯数据:
[0189]
s8、判断是否外闭环:
[0190]
①
、若是,则执行步骤s9。
[0191]
②
、如否,则跳转至步骤s11。
[0192]
s9、位置pid控制。
[0193]
s10、速度pi控制。
[0194]
s11、相电流处理。
[0195]
s12、clarke变换。
[0196]
s13、求sim、cos值。
[0197]
s14、park变换。
[0198]
s15、q轴电流pi调节。
[0199]
s16、d轴电流pi调节。
[0200]
s17、park逆变换。
[0201]
s18、求取扇区。
[0202]
s19、求取t0、t1和t2。
[0203]
s20、pwm比较器更新数据。
[0204]
如图15、图16、图17、图18、图19、图20所示,永磁同步电机轴向充磁,并且在动子上装有三个霍尔元件,三个霍尔元件之间间隔半个极距,霍尔元件的部与动子线圈接触,以免动子绕组线圈产生的磁场影响线性霍尔元件的测量。永磁同步电机定子绕组为三相绕组,定子极距与动子永磁体极距相等,永磁直线同步电机的气隙磁场沿运动方向呈正弦分布。在动子上安装3个参数一致的线性霍尔元件,彼此相隔半个极距,3个霍尔器件面向圆筒直线的轴心,使气隙中的磁场径向分量作为霍尔器件的感应磁场,垂直于霍尔器件的磁场感应面。由于线性霍尔器件的特性,当动子沿轴直线运动时,霍尔器件的输出电压应是按位移变化的正/余弦信号,再对两路信号进行一定的模拟、数字处理,获得动子的绝对位置信号。所述动子位置计算包括以下步骤:
[0205]
s5-1:将线性霍尔元件上输出的信号经过一个压控电压源低通滤波器进行过滤,通常从传感器直接输出的信号会受各种因素的影响而使波形产生纹波,影响信号的稳定性,所以从线性霍尔元件上输出的信号需要经过一个压控电压源低通滤波器过滤,保证滤波电路中的运放输出不饱和。
[0206]
s5-2:在三路滤波器的输入端前面分别加入利用差分式电路实现减法运算的减法器,调整信号的中心位置与幅值。
[0207]
s5-3:低通滤波器输出电压仍然不是幅值、中心位置一致的信号,在三路低通滤波器的输出端再各加入一个同相输入求和运算电路,用来调节低通滤波器输出信号的幅值与中心位置。
[0208]
s5-4:由线性霍尔元件采得并且经过处理的三路信号通入dsp进行计算,通过计算得出直线电机动子的绝对位置。当动子正向运动,-sin信号与电机u相反电势同步,如果动子反向运动,+sin信号与u相反电势同步。
[0209]
s5-5:将测得的正、余弦曲线和动子电压采样校准,确保这两者的起点相同。
[0210]
s5-5:通过正余弦值sin(θ)、cos(θ)计算出动子现有的相对位置对应的角度θ,再把角度转换成相对位置,加上由安装在电机定子两侧的霍尔接近开关获得的绝对位置就可
以得到动子运动过程中的绝对位置。其中角度和相对位置的转换关系如下所示:
[0211][0212]
其中s为相对位置。θ为计算得出的角度。τ为极距。n为周期数。
[0213]
由此获得较为准确的动子位置。
[0214]
如附图12所示,本实施例中的步骤s10中速度pi控制具体如下:
[0215]
s10-1、速度pi调节。
[0216]
s10-2、读取速度给定n
*
。
[0217]
s10-3、计算偏差e(kt)=n
*-n。
[0218]
s10-4、计算n
p
(kt)=kp[e(kt)-e(kt-t)]。
[0219]
s10-5、计算ni(kt)=kie(kt)。
[0220]
s10-6、计算δn(kt)=n
p
(kt)+ni(kt)。
[0221]
s10-7、处理防积分饱和。
[0222]
s10-8、根据n(kt)给出q轴电流给定i
q*
。
[0223]
如附图13所示,本实施例中的步骤s15中q轴电流pi调节具体如下:
[0224]
s15-1、q轴电流pi调节。
[0225]
s15-2、读取电流给定i
q*
。
[0226]
s15-3、计算偏差e(kt)=i
q*-iq。
[0227]
s15-4、计算i
p
(kt)=kp[e(kt)-e(kt-t)]。
[0228]
s15-5、计算ii(kt)=kie(kt)。
[0229]
s15-6、计算δi(kt)=i
p
(kt)+ii(kt)。
[0230]
s15-7、处理防积分饱和。
[0231]
s15-8、根据i(kt)给出q轴电压给定v
q*
。
[0232]
如附图14所示,本实施例中的步骤s16中d轴电流pi调节具体如下:
[0233]
s16-1、d轴电流pi调节。
[0234]
s16-2、读取电流给定i
d*
。
[0235]
s16-3、计算偏差e(kt)=i
d*-id。
[0236]
s16-4、计算i
p
(kt)=kp[e(kt)-e(kt-t)]。
[0237]
s16-5、计算ii(kt)=kie(kt)。
[0238]
s16-6、计算δ(kt)=i
p
(kt)+ii(kt)。
[0239]
s16-7、处理防积分饱和。
[0240]
s16-8、根据i(kt)给出q轴电压给定v
d*
。
[0241]
各符号含义如下:n(kt)/i(kt)-控制器的输出值。
[0242]
k-比例系数。
[0243]
t-调节周期。
[0244]
e(kt)-控制器输入与设定值之间的误差。
[0245]
如附图10所示,本实施例中的步骤s18中求取扇区具体如下:
[0246]
s18-1、计算扇区。
[0247]
s18-2、扇区p=0。
[0248]
s18-3、p1=sign(vsβ)。
[0249]
s18-4、p2=2sign[sin60
°
vsα-sin30
°
vsβ]。
[0250]
s18-5、p3=4sign[-sin60
°
vsα-sin30
°
vsβ]。
[0251]
s18-6、p=p1+p2+p3。
[0252]
s18-7、查表确定扇区sector。
[0253]
如附图11所示,本实施例中的步骤s20中pwm比较器更新数据具体如下:
[0254]
s20-1、计算svpwm。
[0255]
s20-2、读取扇区号sector。
[0256]
s20-3、查表读逆阵表,计算c0、c1和c2。
[0257]
s20-4、计算t1=0.5c1。
[0258]
s20-5、计算t2=0.5c2。
[0259]
s20-6、计算t0=0.25c0。
[0260]
s20-7、计算pwm比较器值。
[0261]
s20-8、更新pwm比较器值。
[0262]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制。尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换。而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。