1.本实用新型涉及机器人设备技术领域,具体涉及一种智能机器人移动平台。
背景技术:
2.机器人的控制装置是智能机器人的核心零部件之一,在检修或调试过程中,拆卸频率相对较高,现有的工业机器人的控制装置一般安装在底座壳体的内部或底座上方的安装板内,前者需要将壳体拆开,后者需要将安装板拆卸下来,都比较麻烦,影响工作进度。
技术实现要素:
3.有鉴于此,本实用新型提供一种智能机器人移动平台,不仅能简化控制装置的拆卸步骤,而且散热效果良好。
4.为解决上述技术问题,本实用新型提供一种智能机器人移动平台,包括底座,所述底座底部四角均轴承连接有麦克纳姆轮,所述底座内部与麦克纳姆轮对应位置均固定安装有用于驱动麦克纳姆轮的伺服电机,所述伺服电机的输出轴与麦克纳姆轮通过联轴器连接,所述底座上表面固定安装有支撑板,所述支撑板上表面固定安装有用于安装机械臂的安装板,所述支撑板和安装板均开设有与控制装置相配合的开口,所述安装板上表面与控制装置的紧固螺钉对应的位置开设有拆卸孔,所述拆卸孔内合页连接有拆卸板。
5.进一步的,所述安装板设置在靠近支撑板开口一侧,所述安装板开口一侧与支撑板开口一侧的距离为5-8cm。
6.进一步的,所述支撑板上表面远离安装板一侧开设有通孔。
7.进一步的,所述拆卸孔的长为6-8cm,拆卸孔的宽为6-8cm,所述拆卸板与拆卸孔的大小相对应。
8.进一步的,所述拆卸板远离合页一侧通过弹簧卡扣与安装板连接。
9.本实用新型的上述技术方案的有益效果如下:
10.1、本实用新型的控制装置设置在底座上方,由于拆卸板的设置,在拆卸控制装置时只需将外侧的螺钉拆卸后,拆卸板翻转,通过拆卸孔用拆卸工具将内侧的螺钉取下即可,无需将整个支撑板全部拆除,大大降低了拆卸时间,提高了便利性,
11.2、本实用新型的控制装置设置在底座上方,空气流通及散热良好,降低了控制装置因散热而出现故障,提高了设备的使用寿命。
附图说明
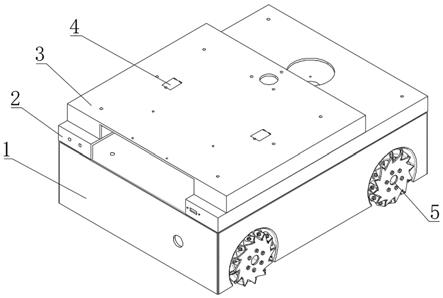
12.图1为本实用新型智能机器人移动平台的立体示意图。
13.1、底座;2、支撑板;3、安装板;4、拆卸板;5、麦克纳姆轮。
具体实施方式
14.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新
型实施例的附图1,对本实用新型实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本实用新型的一部分实施例,而不是全部的实施例。基于所描述的本实用新型的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
15.如图1所示:一种智能机器人移动平台,包括底座1,底座1底部四角均轴承连接有麦克纳姆轮5,底座1内部与麦克纳姆轮5对应位置均固定安装有用于驱动麦克纳姆轮5的伺服电机,伺服电机的输出轴与麦克纳姆轮5通过联轴器连接,以上均为现有技术,在此不作详细描述,底座1上表面固定安装有支撑板2,支撑板2上表面固定安装有用于安装机械臂的安装板3,支撑板2和安装板3均开设有与控制装置相配合的开口,支撑板2和安装板3的开口形状和开口位置可参考图1,安装板3上表面与控制装置的紧固螺钉对应的位置开设有拆卸孔,拆卸孔内合页连接有拆卸板4,通过合页连接,拆卸板4不会被完全拆下,避免掉落遗失。
16.根据本实用新型的一个实施例,如图1所示,
17.安装板3设置在靠近支撑板2开口一侧,安装板3开口一侧与支撑板2开口一侧的距离为5cm,安装板3至支撑板2略微错开,便于拆卸靠近开口一侧的控制装置的螺钉。
18.根据本实用新型的一个实施例,如图1所示,
19.支撑板2上表面远离安装板3一侧开设有通孔,用于安装外部的视觉导航装置。
20.根据本实用新型的一个实施例,如图1所示,
21.拆卸孔的长为6cm,拆卸孔的宽为6cm,拆卸板4与拆卸孔的大小相对应。
22.根据本实用新型的一个实施例,如图1所示,
23.拆卸板4远离合页一侧通过弹簧卡扣与安装板3连接,拆卸孔侧壁上开设有与卡扣配合的凹槽,在使用时,向内推动卡扣,弹簧收缩,卡扣与凹槽分离,翻起拆卸板4即可。在其他实施例中,拆卸板4也可以通过螺钉的方式固定连接或通过滑动的方式连接。
24.本实用新型的工作方法(或工作原理):
25.底座1上方的支撑板2和安装板3开设有安装控制装置的位置,与底座1壳体内部相比,其空气流通快、散热效果更好,安装板3两侧与控制装置的螺钉对应的位置开设有拆卸孔,在拆卸控制装置的时候,推动卡扣使其与凹槽分离,翻转拆卸板4,使用带有磁铁的螺丝刀通过拆卸孔将控制装置的螺钉取下并吸出,靠近安装板3开口一侧的螺钉直接使用螺丝刀取出即可。
26.在本实用新型中,除非另有明确的规定和限定,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
27.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
技术特征:
1.一种智能机器人移动平台,其特征在于:包括底座(1),所述底座(1)底部四角均轴承连接有麦克纳姆轮(5),所述底座(1)内部与麦克纳姆轮(5)对应位置均固定安装有用于驱动麦克纳姆轮(5)的伺服电机,所述伺服电机的输出轴与麦克纳姆轮(5)通过联轴器连接,所述底座(1)上表面固定安装有支撑板(2),所述支撑板(2)上表面固定安装有用于安装机械臂的安装板(3),所述支撑板(2)和安装板(3)均开设有与控制装置相配合的开口,所述安装板(3)上表面与控制装置的紧固螺钉对应的位置开设有拆卸孔,所述拆卸孔内合页连接有拆卸板(4)。2.如权利要求1所述的智能机器人移动平台,其特征在于:所述安装板(3)设置在靠近支撑板(2)开口一侧,所述安装板(3)开口一侧与支撑板(2)开口一侧的距离为5-8cm。3.如权利要求1所述的智能机器人移动平台,其特征在于:所述支撑板(2)上表面远离安装板(3)一侧开设有通孔。4.如权利要求1所述的智能机器人移动平台,其特征在于:所述拆卸孔的长为6-8cm,拆卸孔的宽为6-8cm,所述拆卸板(4)与拆卸孔的大小相对应。5.如权利要求1所述的智能机器人移动平台,其特征在于:所述拆卸板(4)远离合页一侧通过弹簧卡扣与安装板(3)连接。
技术总结
本实用新型提供一种智能机器人移动平台,属于机器人技术领域,包括底座,所述底座底部四角均轴承连接有麦克纳姆轮,所述底座内部与麦克纳姆轮对应位置均固定安装有用于驱动麦克纳姆轮的伺服电机,所述伺服电机的输出轴与麦克纳姆轮通过联轴器连接;本实用新型的控制装置设置在底座上方,由于拆卸板的设置,在拆卸控制装置时只需将外侧的螺钉拆卸后,拆卸板翻转,通过拆卸孔用拆卸工具将内侧的螺钉取下即可,无需将整个支撑板全部拆除,大大降低了拆卸时间,提高了便利性,本实用新型的控制装置设置在底座上方,空气流通及散热良好,降低了控制装置因散热而出现故障,提高了设备的使用寿命。用寿命。用寿命。
技术研发人员:冯兴 李冰 胡英才
受保护的技术使用者:河南固睿智能科技有限公司
技术研发日:2021.05.31
技术公布日:2022/1/21