1.本发明涉及轨道车辆与钢轨检测技术,具体而言,涉及一种轨道车载钢轨检测装置。
背景技术:
2.随着我国高速铁路的大量建设和运营,我国铁路运营总里程突破13万公里,铁路运输生产对线路养修作业方式提出了新的要求。原有的利用列车运行间隔时分进行线路检查的作业方式,已被现有的天窗作业方式所替代。而作业速度仅为2km/h的手推式探伤仪在3-4h天窗时间内检测效率低下,需要大量的人力进行分段同时检测。铁路运输是交通物流和国民经济的大动脉,钢轨是铁路系统的基本构件,起着支撑列车的作用,为保证安全运行,对钢轨的提出了严格的质量检测要求。
3.现有的手推式或手持式钢轨检测设备至少存在以下缺点;
4.1、钢轨长度较长,检测人员长时间长距离手拿装置或推动小车进行检测十分的费力,并且人工移动速度也比较慢,检测效率相对较低。
5.2、现有的钢轨检测装置的工作地点是在钢轨上,一般铺设钢轨的区域均较为偏僻,无方便充电的地方,因此现有的检测装置的检测时间和检测长度均受到电瓶的蓄电能力限制,使用不便。
6.现有的双轨式探伤车钢轨检测设备至少存在以下缺点;
7.现有的钢轨检测设备在对准钢轨位置过程中,缺少对待检测的钢轨中心对准功能,容易发生位置偏移,该装置在实际使用过程中,需要操作人员根据目测手动调整位置,影响工作效率,例如通过手动控制电推杆使探轮沿滑动导轨移动的方式保证探轮垂直对准钢轨中心。
技术实现要素:
8.为解决上述问题,本发明提供一种钢轨检测系统,以改善现有的钢轨检测装置自动化程度低、操作费时费力、检测效率低的问题,并改变以往需要手动调整检测设备的情况,实现将检测装置自动快速对准钢轨中心的效果。
9.本发明的技术方案如下:
10.一种钢轨检测系统,包括
11.行走机构,所述行走机构沿钢轨行走,将检测装置运送到初步定位的待检测位置附近准备开展检测工作;
12.水平移动机构,所述水平移动机构与所述行走机构连接,所述行走机构带动所述水平移动机构行走,在所述行走机构停到待检测位置附近之后,所述水平移动机构平行于钢轨延伸方向移动,将检测装置准确移动至精准定位的待检测位置正上方;
13.竖直升降机构,所述竖直升降机构与所述水平移动机构连接,所述竖直升降机构上设置有所述检测装置,所述竖直升降机构竖直升降带动所述检测装置升降;
14.对中机构,所述对中机构与所述检测装置连接,所述对中机构包括受力机构、随动机构,所述受力机构设置为处于非对中状态位置时受力机构产生沿垂直于钢轨延伸方向作用力,设置于所述竖直升降机构与所述水平移动机构之间的所述随动机构在受力的情况下沿垂直于钢轨延伸方向做自适应的调整运动使得检测装置对准钢轨中心。
15.对中过程中,所述竖直升降机构驱动所述检测装置下降时,所述受力机构与钢轨轨头接触产生竖直方向作用力以及所述受力机构与钢轨轨头位置偏差产生沿垂直于钢轨延伸方向作用力,并通过垂直于钢轨延伸方向作用力的反作用力带动竖直升降机构与水平移动机构之间的随动机构,使竖直升降机构沿垂直于钢轨延伸方向做自适应的调整运动,最终竖直升降机构与检测装置一同对准钢轨中心,竖直升降机构提供的竖直方向的下压力正垂直于钢轨表面,检测装置得以正压紧贴合于钢轨表面。
16.优选的,所述受力机构为导轮,所述导轮设置于所述竖直升降机构下端,所述导轮与所述检测装置连接,所述导轮包括弹性连接的两侧导轮,侧导轮内侧面用于与钢轨轨头内外侧面贴合使对位机构实现对位,所述竖直升降机构带动所述对位机构下降时,所述导轮两内侧面通过弹性力活动调节至与钢轨头部踏面和钢轨轨头内外侧面的表面贴合,使得所述检测装置对准待检测位置。
17.优选的,所述受力机构包括两个对称的侧导轮、连接轴、弹性件,两个所述侧导轮套设于所述连接轴上形成导轮,两个所述侧导轮外侧面或者内侧面设置有弹性件,使得所述导轮用于与钢轨轨头内外侧面贴合的两内侧面活动设置。
18.优选的,所述受力机构包括立板,所述立板设置于所述竖直升降机构下端,所述导轮与所述立板连接,所述检测装置与所述立板连接,使得所述导轮与所述检测装置连接。
19.优选的,所述随动机构设置于所述竖直升降机构与所述行走机构连接处,所述随动机构与所述行走机构采用沿垂直于钢轨延伸方向设置的长腰孔活动配合轴和轴承的结构,或者,所述随动机构采用沿垂直于钢轨延伸方向设置的自由活动导轨活动连接结构。
20.优选的,所述对位机构包括接近开关,所述接近开关设置于所述竖直升降机构下端并位于钢轨轨头内侧或外侧侧面,所述接近开关在感测范围内感测与钢轨头部踏面下一定距离的钢轨轨头内侧或外侧侧面之间的距离并根据预设距离调整所述水平移动机构移动,带动所述水平移动机构下的所述检测装置移动至待检测位置对准钢轨中心正上方,所述竖直升降机构驱动所述检测装置降至待检测位置。
21.优选的,所述受力机构包括导向轮和导向犁,所述导向轮与钢轨头部踏面和钢轨轨头内侧面贴合,所述导向犁与钢轨轨头内侧面贴近。
22.优选的,所述随动机构包括弹性张紧装置,所述检测装置与所述行走机构通过支架连接,所述支架与所述水平移动机构通过弹性张紧装置连接,所述弹性张紧装置提供沿垂直于钢轨延伸方向弹性作用力,调整所述检测装置与钢轨的相对位置。
23.优选的,所述水平移动机构还沿垂直于钢轨延伸方向移动。
24.优选的,所述水平移动机构平行于钢轨延伸方向移动或沿垂直于钢轨延伸方向移动采用气缸驱动、液压缸驱动、螺杆驱动、同步带驱动或推杆驱动;所述竖直升降机构的升降采用气缸驱动、液压缸驱动、螺杆驱动、同步带驱动或推杆驱动。
25.优选的,所述水平移动机构安装固定于所述行走机构上,或者,所述水平移动机构通过拖拽连接机构与所述行走机构连接。
26.优选的,所述水平移动机构与所述竖直升降机构固定连接或者铰接。
27.优选的,所述检测装置与所述竖直升降机构固定连接或者铰接。
28.优选的,所述行走机构通过内部设置驱动装置或者外部连接驱动装置实现行走。
29.与现有技术相比,本发明的有益效果如下:
30.第一.本发明行走机构沿钢轨行走,将检测装置整体初步运送到待检测位置,通过水平移动机构精确移动定位,通过对中机构的受力机构处于非对中状态位置时可产生沿垂直于钢轨延伸方向作用力,通过该作用力的反作用力作用于随动机构,进而带动检测装置沿垂直于钢轨延伸方向做自适应的调整运动实现对中,并且,竖直升降机构提供的竖直方向的下压力正垂直于钢轨表面,检测装置得以正压紧贴合于于钢轨表面,本对中装置结构简单、可靠,可实现实时的自动、精准对中,为实现自动化检测提供可能;
31.第二.水平移动机构实现检测装置水平面上沿垂直于钢轨延伸方向或者平行于钢轨延伸方向移动,通过水平移动机构可以将检测装置准确移动至待检测位置或者移动至某一位置进行复检;
32.第三.本发明的接近开关或者导轮的设置,可以在检测装置对准待检测位置过程中,通过对位机构对位作用,可防止检测装置位置发生偏离,进一步对位确保检测装置能够对准待检测位置;
33.第四.本发明另一结构通过弹性张紧装置调整所述水平移动机构与钢轨的相对位置,可防止检测装置位置发生偏离,进一步对位确保检测装置能够对准待检测位置钢轨中心。
34.当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
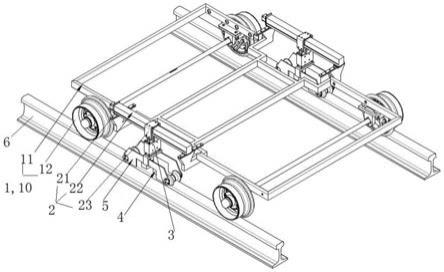
35.图1为本发明钢轨检测系统结构示意图;
36.图2为图1侧面结构示意图;
37.图3为本发明纵向导轨处结构示意图;
38.图4为图3侧面示意图;
39.图5为本发明导轮处结构示意图;
40.图6为图5正面示意图;
41.图7为本发明另一钢轨检测系统结构示意图,不含行走机构;
42.图8为图7侧面示意图;
43.图9为本发明图7所示钢轨检测系统的对位机构对位过程示意图;
44.图10为钢轨剖面简图;
45.图11为本发明另一的钢轨检测系统结构示意图;
46.图12为图11侧面结构示意图;
47.图13为竖直升降机构上随动机构示意图;
48.图14为竖直升降机构由滑块导轨驱动示意图;
49.图15为竖直升降机构由螺杆驱动示意图;
50.图16为竖直升降机构由同步带驱动示意图;
51.图17为竖直升降机构由气缸驱动示意图;
52.图18为竖直升降机构由液压缸驱动示意图;
53.图19为竖直升降机构由电推杆驱动示意图。
具体实施方式
54.下面结合附图和具体实施例,进一步阐述本发明。应该理解,这些实施例仅用于说明本发明,而不用于限定本发明的保护范围。在实际应用中本领域技术人员根据本发明做出的改进和调整,仍属于本发明的保护范围。
55.为了对本实施例的方向进行更清楚的描述,以轨道为基准,两条轨道所在的平面为水平面,在水平面中,轨道延伸方向为纵向,垂直于轨道方向为横向。
56.一种钢轨检测系统,如图1、图11所示,包括
57.行走机构1,所述行走机构1沿钢轨行走,将检测装置4运送到初步定位的待检测位置附近准备开展检测工作;
58.设置水平移动机构2,所述水平移动机构2与所述行走机构1连接,所述行走机构1带动所述水平移动机构2行走,在所述行走机构停到待检测位置附近之后,水平移动机构2平行于钢轨延伸方向移动,将检测装置准确移动至精准定位的待检测位置正上方;
59.竖直升降机构3,所述竖直升降机构3与所述水平移动机构2连接,随所述水平移动机构2平行于钢轨延伸方向和/或垂直延伸于钢轨延伸方向移动,所述竖直升降机构3上设置有检测装置4,所述竖直升降机构3竖直升降带动所述检测装置4下降,落位至待检测钢轨6上;
60.通过前面的水平移动机构2、竖直升降机构3实现检测装置的多维度运动;
61.对中机构,所述对中机构与所述检测装置4连接,所述对中机构包括受力机构5,7、随动机构,所述受力机构5,7设置为处于非对中状态位置时受力机构产生沿垂直于钢轨延伸方向作用力,所述竖直升降机构3驱动所述检测装置4下降时,所述受力机构5,7与钢轨轨头接触产生竖直方向作用力以及所述受力机构5,7与钢轨轨头位置偏差产生沿垂直于钢轨延伸方向作用力,并通过垂直于钢轨延伸方向作用力的反作用力带动竖直升降机构3上的随动机构,使竖直升降机构3沿垂直于钢轨延伸方向做自适应的调整运动,最终竖直升降机构与检测装置一同对准钢轨中心,竖直升降机构提供的竖直方向的下压力正垂直于钢轨表面,检测装置得以正压紧贴合于于钢轨表面。
62.受力机构5可以是导轮,导轮包括弹性连接的两侧导轮,侧导轮内侧面用于与钢轨轨头内侧面接触贴合实现对中。
63.对中机构,调整所述检测装置位置,使得所述检测装置对准钢轨中心,检测装置开始检测工作;
64.在一待检测位置完成检测工作后,所述竖直升降机构和水平移动机构依次回归原位,所述检测装置整体恢复初始状态,之后所述行走机构或者水平移动机构继续前往下一待检测位置进行检测;
65.或在行走机构的行走过程中,所述水平移动机构、竖直升降机构、对中机构保持工作状态,使检测装置对钢轨持续进行检测工作。
66.当然,也可根据需要省略水平移动机构,通过行走机构也可实现类似于水平移动机构的沿平行于钢轨延伸方向的水平移动作用。竖直升降机构3通过合适连接部件与行走
机构连接。此时,所述对中机构调整所述检测装置位置,可以是直接作用与检测装置上,或者通过水平移动机构或竖直升降机构间接作用于检测装置上,使得检测装置对准钢轨中心,对准钢轨中心或者称之为对准待检测位置、或者对中。
67.对中机构对中过程中的移动、水平移动机构移动、竖直升降机构的移动,发生顺序可以根据具体结构或者需要进行设计,甚至可以同时进行多个移动动作,下面具体实施例中的移动动作顺序除非有明确说明,否则各个动作发生顺序包括并不限定在下面实施例中。
68.下面实施例以设置水平移动机构2为例进行说明。
69.如图1所示,所述竖直升降机构3上设置有检测装置4、对位机构5,所述竖直升降机构3竖直升降带动所述检测装置4、对位机构5升降;
70.所述检测装置4、对位机构5连接,所述竖直升降机构3带动所述检测装置4下降时,所述对位机构5调整所述对位机构5自身与钢轨6的相对位置,使所述检测装置4的位置得以调整,使得所述检测装置4对准钢轨上待检测位置。
71.参见图1,通过水平移动机构2实现检测装置4水平面上横向/纵向移动,竖直升降机构3实现检测装置升降,并通过所述检测装置4、对位机构5连接,使得其位置是相对固定的,所述对位机构5调整所述对位机构自身与钢轨的相对位置,使所述检测装置4的位置得以调整,使得所述检测装置4对钢轨上准待检测位置。
72.检测装置4对钢轨上准待检测位置,一般指检测装置4对准待检测位置处钢轨中心。具体的,参见图10,示出钢轨轨头、钢轨头部踏面、以及钢轨轨头侧面(又称为钢轨轨头内外侧面,包括钢轨轨头内侧面、钢轨轨头外侧面)。由于钢轨对称的结构,钢轨中心位于垂直平分钢轨的中心线上,中心线如图10中断点线所示。检测装置中心位于钢轨中心线上,可以认为是检测装置4对准待检测位置。
73.行走机构1可以采用现有技术中的可在钢轨上行走的机构。如图1所示,行走机构为小车10,包括框架11和行车轮12,框架11前后端设置有行车轮12,行车轮12是小车10在钢轨3上的支撑滚动轮,起到小车10在钢轨3上前进的支撑导向作用。进一步的,所述行走机构通过内部设置驱动装置或者外部连接驱动装置实现行走,对于驱动装置的实现形式,可以是电动、手推等,此处不做限定。
74.如图1所示,所述水平移动机构2设置在所述行走机构1上与所述行走机构1连接,连接方式此处不做限制。在一实施例中,行走机构为小车10时,水平移动机构2设置在框架11上并与框架11连接,为了与左右两条钢轨对应,水平移动机构2左右对称布置在检测小车10的两侧前后走行车轮之间。
75.为了容易实现竖直升降机构3升降自动化,以图4、图14为例,滑动块23下部通过连接件30连接升降气缸31,升降气缸31可以连接检测装置和对位机构,升降气缸31升降,以带动与其连接的检测装置和对位机构升降。在其他实施例中,所述竖直升降机构3的升降驱动形式包括但不限于由如图17所示的气缸驱动、如图18所示液压缸驱动、如图15所示螺杆驱动,如图16所示同步带驱动,如图19所示推杆或者电推杆驱动。
76.同样,所述水平移动机构2可以是导轨式,包括横向导轨21和纵向导轨22,所述横向导轨21垂直于钢轨6方向设置,所述纵向导轨22平行于钢轨6方向设置,所述纵向导轨22滑动设置于所述横向导轨21,横向导轨21带动纵向导轨22移动,所述纵向导轨22上设置有
可沿所述纵向导轨22滑动的滑动块23;所述竖直升降机构与所述滑动块23连接,随所述滑动块23横向或纵向移动。或者,所述水平移动机构2可以是同步带式结构等其他合适结构。
77.与竖直升降机构3驱动类似,所述水平移动机构2的纵向导轨22由气缸驱动、液压缸驱动、螺杆驱动、同步带驱动或推杆驱动,或者其他合适驱动形式。对于气缸驱动、液压缸驱动、螺杆驱动、同步带驱动或推杆驱动的具体实现形式,可以采用现有技术,可以是手动或者电动等,此处不再展开。
78.为了容易实现自动化,以图3为例,纵向导轨22端部设置有导轨电机220,导轨电机通过气缸、液压缸、螺杆、同步带或推杆驱动纵向导轨22在横向导轨21上横向运动。所述滑动块23采用气缸驱动、液压缸驱动、螺杆驱动、同步带驱动或推杆驱动。对于气缸驱动、液压缸驱动、螺杆驱动、液压缸驱动、同步带驱动或推杆驱动的具体实现形式,可以采用现有技术,可以是手动或者电动,此处不再展开。
79.所述检测装置与所述竖直升降机构铰接,当检测装置接触轨道平面时,可以进行微调整,以保证检测装置与钢轨轨道平面密切贴合。
80.对于本技术的钢轨检测系统停驻的钢轨段,一般较短,可以看作是直线的钢轨,相应的,水平移动机构的横向导轨21和纵向导轨22也设置为直线导轨。
81.对于本技术水平移动机构的横向或纵向移动实现形式,在其他实施例中,也可以采用其它形式,比如纵向导轨既可横向移动又可纵向移动等。
82.下面对对位机构进行介绍。如图1所示,所述对位机构为导轮式对位机构。
83.具体的,参见图1、图2,所述对位机构5为导轮式对位机构,包括导轮51、立板52,所述立板52设置于所述竖直升降机构3下端,所述导轮51与所述立板52连接,所述检测装置4与所述立板52连接,所述导轮51用于与钢轨轨头内外侧面贴合的两内侧面活动设置,所述竖直升降机构3带动所述对位机构5、检测装置4下降时,所述导轮51两内侧面与钢轨的相互活动,从而导轮51两内侧面调节至与钢轨轨头头部踏面和钢轨轨头内外侧面的表面贴合,所述导轮51位置得以与钢轨中心对正,竖直向驱动力在下压时通过导轮51部分转化的横向驱动力使得所述立板52上连接的所述检测装置4对准待检测位置。立板52用于布置安装检测装置4,并且将检测装置4、导轮51连接使得检测装置4、导轮51的位置是相对固定的,当导轮51的两内侧面调整至与钢轨轨头内外侧面贴合时,导轮中心与钢轨中心对正,检测装置4得以对准钢轨待检测位置而不发生位置偏离。应该理解,在下降过程中,导轮的应该是先与钢轨接触对正,从而使检测装置对正。
84.参见图5、图6,所述对位机构5的导轮51包括两个侧导轮53、连接轴54、弹性件55,两个所述侧导轮53套设于所述连接轴54上形成导轮51,两个所述侧导轮53外侧面或者内侧面设置有弹性件55,使得所述导轮用于与轨头贴合的两内侧面53a活动设置。此时,立板52与连接轴54连接,使得所述导轮51与所述立板52连接。弹性件55可以是弹簧等弹性连接件,如图5、图6所示,两个所述侧导轮53外侧面设置有压缩弹簧55a,使得两个侧导轮53用于与钢轨轨头内外侧面贴合的内侧面活动设置。竖直升降机构提供竖直向下的力,当检测装置4向内/外侧偏离钢轨中心时,内/外侧的侧导轮53的内侧面53a被钢轨轨头内/外侧面压紧,内/外侧弹性件55被压缩并给装置向钢轨中心推动的力,且由于连接件30为一随动机构,允许竖直升降机构和其下方连接的对位机构和检测装置共同在垂直于钢轨延伸方向横向移动,故带动竖直升降机构、对位机构和检测装置向钢轨中心移动,直至两侧导轮内侧面53a
与钢轨轨头内外侧面贴合,两侧弹性件55的力达到平衡,竖直升降机构与检测装置一同对正钢轨中心,竖直升降机构提供的下压力正垂直于钢轨表面,检测装置得以正压紧贴合于于钢轨表面。或者,通过导轨21设置为随动导轨,类似于连接件30,允许竖直升降机构和其下方连接的对位机构和检测装置共同在垂直于钢轨延伸方向横向移动,也可实现随动对中效果。
85.关于本技术的检测装置4,检测装置4包括一个或者多个探头(图中未示出),探头的型号、数量、结构(如是否包括伸缩结构)以及对探头的控制方式等,可以采用现有技术中合适的方式,本技术均不做限定。当所述对位机构对位完成,检测装置对准检测位置,此时,探头可布置在待检测位置,如钢轨轨头踏面、轨头左右侧、轨腰、轨底。
86.下面对图1所示的钢轨检测系统的对中过程进行说明。
87.当行走机构1,如小车10,行驶到钢轨初步定位的待检测位置附近并停好后,如焊缝,再精准定位钢轨待检测位置,然后直线导轨电机220带动纵向导轨22在横向导轨21运动、滑动块23在纵向导轨22上运动,使滑动块23及其下的装置部分能准确移动指定距离,到达钢轨待检测位置正上方的指定位置。其中,定位钢轨待检测位置可以采用定位方式,如摄像头,此处不限制。
88.竖直升降机构下降,如升降气缸31通过气动的方式,使对中机构和检测装置迅速稳定下落在轨道平面上。
89.当升降气缸31下落,对中机构导轮51开始接触轨头时,导轮受到竖直升降机构的向下的力,两侧导轮53轮缘内侧面逐渐被钢轨轨头内外侧面压紧并向钢轨两侧移动,同时在压缩弹簧55a的作用下两侧导轮53轮缘能够保证贴合钢轨轨头侧面。在这一过程中,参见图13,由于连接件30为一随动机构,例如,其上设置有长孔,允许升降气缸31和其下方连接的对中机构和检测装置共同在垂直于钢轨延伸方向横向移动,压缩弹簧55a提供的压力会带动升降气缸31、对中机构和检测装置沿垂直于钢轨延伸方向移动,至两侧压缩弹簧55a的力达到平衡,最终由于升降气缸和压缩弹簧的共同作用,两个侧导轮53得以完全贴合钢轨头部踏面和轨头内外侧面,升降气缸31与检测装置4一同自动对准钢轨中心,升降气缸31提供的下压力正垂直于钢轨表面,检测装置得以正压紧贴合于于钢轨表面便于之后进行检测。
90.如图1所示,所述水平移动机构设置在所述行走机构上与所述行走机构连接,连接方式不做限制。与前面实施例不同之处在于,所述对中机构为接近开关式对中机构。
91.如图7、图8所示,所述对中机构为接近开关式对中机构时,所述对中机构包括接近开关56,所述接近开关56设置于所述竖直升降机构3下端并位于钢轨6轨头内侧或外侧侧面,此时,通过行走机构的走行轮(如行车轮12)确定装置整体与钢轨头部踏面之间的相对位置,在感测控制范围内,接近开关56感测并调整实现准钢轨中心,例如,所述接近开关56感测与钢轨6头部踏面下16mm的轨头侧面之间的距离并根据预设距离调整所述水平移动机构移动,带动所述水平移动机构下的所述检测装置移动至待检测位置对准钢轨中心正上方,所述竖直升降机构驱动所述检测装置降至待检测位置,当然也可以是其它的合适感测距离。具体的,接近开关感应与钢轨轨头侧面的距离并根据预设距离调整控制所述纵向导轨22在所述横向导轨21上滑动,使得检测装置与钢轨对中,此时,所述纵向导轨22下的所述检测装置移动至待检测位置对准钢轨中心正上方,所述竖直升降机构驱动所述检测装置下
降至待检测位置。本技术中,装置整体可以指检测装置及其上布置的装置形成一个装置总称。
92.进一步的,水平移动机构、竖直升降机构参见前面实施例,此处不再展开。
93.此方案所依赖接近开关感测调整与钢轨的距离,距离的调整是接近开关通过电连接或者其他连接方式控制纵向导轨沿垂直于钢轨延伸方向移动。距离的调整具体实现形式可以是垂直于轨道方向的横向导轨21和接近开关56控制连接,其中横向导轨21安装于纵向导轨22两端并固定于车体上,负责带动装置整体沿垂直于对准钢轨中心正上方方向左右移动;接近开关56位于装置整体下方轨头内侧或外侧侧面。
94.为了便于检测装置与钢轨的垂直中心线对准,即前面所述的对中,在前次使用后通过横向导轨21将检测装置及其上的装置形成的装置整体向接近开关56相对钢轨的方向移动一定距离。
95.如图9所示,当车辆行驶至待检测位置所在位置且通过横向导轨21将装置整体移动至待检测位置正上方时,装置整体为抬起状态且偏向接近开关56相对钢轨的方向。
96.启动横向导轨21带动装置整体向钢轨中心方向移动,至装置整体下方的接近开关56接近钢轨轨头6a内侧下方16mm处,接近开关56给出信号横向导轨21停止工作,此时装置整体对准钢轨中心,检测装置对准钢轨中心。
97.之后竖直升降机构工作,带动装置整体下落,导轮向下压紧完全贴合轨头头部踏面,装置对中落位完成。
98.竖直升降机构升降时,若其驱动装置不能精准控制下降的位移时,可能会发生检测装置被下降位移过大,而与钢轨碰撞。为了防止这种情况的发生,增加受力机构。具体的,所述对中机构还包括受力机构,所述竖直升降机构驱动所述检测装置纵向移动时,所述受力机构与钢轨轨头接触,消耗部分竖直升降机构的纵向驱动力,防止所述检测装置移动位移过大。
99.所述受力机构为前面实施例中的分体式导轮或者现有技术中的其他导轮。除了导轮,受力机构还可以是压块等。
100.在其他改进实施例中,所述水平移动机构设置在所述行走机构前方或者后方,与所述行走机构固定连接。例如,固定连接可以是螺纹连接结构、法兰、焊接等,只要能够实现所述水平移动机构随所述行走机构行走时,两者的相对位置保持不变,水平移动机构相对于所述行走机构不产生位移或者偏移。
101.或者,在其他改进实施例中,所述水平移动机构设置在所述行走机构前方或者后方,与所述行走机构铰接。此时,所述水平移动机构随所述行走机构行走时,两者的相对位置会发生变化,水平移动机构相对于所述移动机构产生位移或者偏移。进一步的,可以增加受力机构,所述水平移动机构位移或者偏移时,防止所述检测装置与轨道碰撞。受力机构如前面实施例,可以是导轮或者压块等,导轮可以是现有的一体式导轮,也可是前面的分体式的导轮,此处不再展开。
102.参见图11、图12,对中机构还可以为导向机构7,所述导向机构7与所述水平移动机构2连接,所述导向机构为所述水平移动机构提供导向作用,使得所述检测装置对准待检测位置。
103.本实施例通过水平移动机构2实现检测装置4水平面上横向/纵向移动,竖直升降
机构3实现检测装置升降,并通过导向机构的导向作用,使所述检测装置4的位置得以调整,使得所述检测装置4对钢轨上准待检测位置。
104.此时,所述水平移动机构2通过所述支架8布置于所述行走机构1上,或者所述水平移动机构2通过所述支架8布置在所述行走机构后方。所述支架8与所述行走机构固定连接或者铰接,固定连接可以是胶接、焊接、铆接螺栓连接等。行走机构前面图1已经介绍,此处可以借鉴,如图11所示,行走机构为小车10时,水平移动机构2可以设置在框架11后方并通过支架8与框架11连接,支架8与框架11通过连接件81连接,为了与左右两条钢轨对应,水平移动机构2左右对称布置在检测小车10的两侧。在另一实施例中,行走机构为小车10时,水平移动机构2可以通过支架8设置在框架11上并与框架11连接,支架8与框架11固定连接或者铰接,为了与左右两条钢轨对应,水平移动机构2左右对称布置在检测小车10的两侧前后走行车轮之间。
105.进一步的,所述水平移动机构2与所述行走机构1通过支架8连接,所述支架8与所述行走机构1连接,所述支架8与所述水平移动机构2通过弹性张紧装置9连接,所述弹性张紧装置9调整所述水平移动机构2与钢轨的相对位置。
106.如图11,所述弹性张紧装置9为弹簧张紧装置,在其他实施例中,可以采用氮气推杆等合适的装置。
107.进一步的,所述导向机构包括导向件,所述水平移动机构位置未发生左右偏移时,所述导向件不与钢轨接触,所述水平移动机构相对于钢轨偏移时,所述弹性张紧装置通过弹性力使得所述导向件与钢轨贴合,调整所述检测装置位置,使得所述检测装置对准待检测位置。
108.具体的,所述导向件包括导向轮71或导向犁72,所述导向轮71的轮缘与钢轨轨头表面贴合,所述导向犁72的垫块与钢轨轨头内侧面贴近。也可同时设置导向轮71、导向犁72。
109.导向犁72与钢轨内侧接触部分可以采用固定接触式如垫块,也可采用滚动接触式如滚轮,可以采用软质材料如尼龙,也可采用硬质材料如金属,导向犁72与钢轨内侧接触部分也可以是其它合适的结构或者材质。
110.所述检测装置4与所述竖直升降机构3铰接。当检测装置4接触钢轨轨道平面时可以自动进行微动调整,以保证检测装置与轨道平面密切贴合,也可采用固定连接。
111.下面对图11所示钢轨检测系统对中过程进行说明。
112.如图11所示,本装置包括小车10、支架8、弹性张紧装置9、导向机构7和检测装置4,其中,弹性张紧装置9、导向机构7和检测装置4分别设置有两个,且以拖拽的方式对称布置在小车10后方两侧对称位置。
113.小车10与支架8之间通过可拆分的连接件81连接,以便于操作人员连接和拆分。
114.小车10的车体的竖直方向压力和支架8自身的重力,使导向机构7的导轮71与钢轨头部踏面表面紧密贴合,保证检测装置4与钢轨头部踏面表面紧密贴合,且高速经过道岔等处不会发生跳动影响检测。支架8两侧前后均有导向轮71与钢轨接触承重,且每个导向轮71配有弹性张紧装置9,以保证检测装置4垂直于钢轨表面,且当车体发生左右蛇摆时能抵消影响不会影响检测。
115.导向犁72的导向作用与导向轮71类似,两侧的导向机构7的导向犁72通过与钢轨
内侧接触,为整体装置提供导向作用,整体装置可以指检测装置及其上布置的装置形成一个装置总称。
116.纵向导轨22采用螺杆、同步或气缸带等结构,通过手动、液压缸、电机驱动或气动等方式,使滑块23及其上的检测装置4能准确移动指定距离,到达指定位置,从而实现检测装置4在沿导轨方向上的精确定位。
117.找到指定位置后,竖直升降机构3采用手动、液压缸、螺杆、同步带、电推杆或气缸等合适结构,通过手动、液压驱动、电机驱动或气动等合适方式,使检测装置迅速稳定下落在轨道平面上。
118.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。