1.本实用新型涉及水上救援以及深度学习技术领域,尤其涉及一种基于深度学习的水上救援机器人。
背景技术:
2.在日常生活中,数量巨大的公园人工湖、水库和湖泊的巡逻力度不大、安全措施不到位以及缺乏专业水上应急救援装置,尤其夏天,导致溺水死亡事故频繁发生。为了避免悲剧的发生,有些场景中已实现了水域状态的全天候监控,但是仍然需要有人对监控画面进行看守,这样做不仅费时费力,而且无法保证实时地对落水人员进行营救,故对落水人员的实时自动监测以及提高应急反应能力变得尤其重要。
3.目前针对落水人员的检测主要参考的是地面人体检测方法,使用传统的基于图像处理的落水人体检测面临着水域背景复杂、易受光照影响、倒影与真实落水情况难区分以及落水情况存在差异等问题。
技术实现要素:
4.本实用新型为了解决现有技术中基于图像处理的落水人体检测因复杂水域情况导致准确率不足,无法及时帮助落水人员的问题,提出了一种基于深度学习的水上救援机器人。
5.一种基于深度学习的水上救援机器人,包括摄像头监测单元、落水人员检测单元以及报警救援单元,所述摄像头监测单元设置于所述报警救援单元的上侧,并与所述落水人员检测单元电性连接,所述落水人员检测单元设置于所述报警救援单元的内部,并与所述报警救援单元固定连接,所述报警救援单元包括储气罐、气囊、外壳体、密封舱体、两个推进器、四个螺旋桨和广播通知模块,所述储气罐与所述气囊相配合,并设置于所述气囊的一侧,所述外壳体包覆所述密封舱体,并设置于所述摄像头监测单元的下侧,所述气囊设置于所述密封舱体的下方的前后两侧,两个所述推进器则设置于所述密封舱体的左右两侧,所述广播通知模块设置于所述密封舱体的内部,并与所述落水人员检测单元电性连接,四个所述螺旋桨设置于所述外壳体的四周,并与两个所述推进器相配合。
6.其中,所述外壳体具有两个推进槽和两个浮力腔,两个所述推进槽设置于所述外壳体的左右两侧,并均与所述推进器相契合,两个所述浮力腔设置于所述外壳体的上方的左右两侧,并与所述密封舱体连接。
7.其中,所述密封舱体包括上部密封体、密封罐和下部密封体,所述上部密封体与所述浮力腔连接,并设置于两个所述浮力腔之间,所述下部密封体设置于两个所述推进槽之间,并与所述上部密封体固定连接,所述密封罐设置于所述上部密封体与所述下部密封体的连接处,并包覆所述落水人员检测单元。
8.其中,所述摄像头监测单元包括红外摄像头和监控终端,所述红外摄像头设置于所述外壳体的上侧,所述监控终端与所述红外摄像头电性连接,并设置于外界。
9.其中,所述红外摄像头包括支撑柱和转动轴承,所述支撑柱设置于所述转动轴承的上侧,所述转动轴承设置于所述外壳体的上侧,并与所述支撑柱转动连接。
10.本实用新型的有益效果为:本实用新型在现有技术的基础上,改进水上救援机器人的结构,利用气囊和推进器相互配合,利用摄像头监测单元和落水人员检测单元的相互配合,有效地提升了落水人员尽早被发现并得到援助的可能性,大大的减少了落水人员收到严重伤害的概率。
附图说明
11.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
12.图1是本实用新型基于深度学习的水上救援机器人的轴测结构示意图。
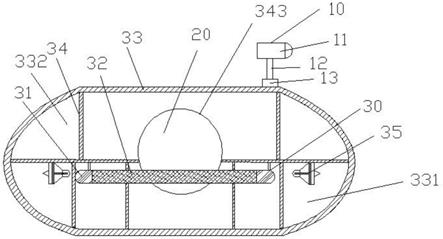
13.图2是本实用新型基于深度学习的水上救援机器人的侧向结构示意图。
14.10-摄像头监测单元、20-落水人员检测单元、30-报警救援单元、11-红外摄像头、12-支撑柱、13-转动轴承、31-储气罐、32-气囊、33-外壳体、34-密封舱体、35-推进器、36-螺旋桨、331-推进槽、332-浮力腔、341-上密封体、342-下密封体、343-密封罐。
具体实施方式
15.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
16.在本实用新型的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,在本实用新型的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
17.请参阅图1和图2,本实用新型提供一种技术方案:
18.一种基于深度学习的水上救援机器人,包括摄像头监测单元10、落水人员检测单元20以及报警救援单元30,所述摄像头监测单元10设置于所述报警救援单元30的上侧,并与所述落水人员检测单元20电性连接,所述落水人员检测单元20设置于所述报警救援单元30的内部,并与所述报警救援单元30固定连接,所述报警救援单元30包括储气罐31、气囊32、外壳体33、密封舱体34、两个推进器35、四个螺旋桨36和广播通知模块,所述储气罐31与所述气囊32 相配合,并设置于所述气囊32的一侧,所述外壳体33包覆所述密封舱体34,并设置于所述摄像头监测单元10的下侧,所述气囊32设置于所述密封舱体34 的下方的前后两侧,两个所述推进器35则设置于所述密封舱体34的左右两侧,所述广播通知模块设置于所述密封舱体34的内部,并与所述落水人员检测单元 20电性连接,四个所述螺旋桨36设置
于所述外壳体33的四周,并与两个所述推进器35相配合。
19.在本实施方式中,所述摄像头监测单元10与落水人员检测单元20相配合,利用所述摄像头监测单元10拍摄画面,又利用所述落水人员检测单元20检测辨别落水人员,最后利用所述报警救援单元30上传信号以让救援人员知晓落水人员的信息,而所述储气罐31用以向所述气囊32输送气体,当检测到人员落水后,鼓起所述气囊32,以使得水上救援机器人能浮在水面上,以被所述推进器35和推进器35推动,而所述广播通知模块用以通知并上传信息,所述外壳体33用以保护各组件,所述密封舱体34用以放置所述落水人员检测单元20与所述摄像头监测单元10的电路部分,避免接触到水而出现短路。
20.进一步的,所述外壳体33具有两个推进槽331和两个浮力腔332,两个所述推进槽设置于所述外壳体33的左右两侧,并均与所述推进器35相契合,两个所述浮力腔332设置于所述外壳体33的上方的左右两侧,并与所述密封舱体 34连接。
21.在本实施方式中,两个所述推进槽331用以配合所述推进器35,所述浮力腔332则用以提升水上机器人的浮力,以满足不同场合的需要。
22.进一步的,所述密封舱体34包括上部密封体、密封罐343和下部密封体,所述上部密封体与所述浮力腔332连接,并设置于两个所述浮力腔332之间,所述下部密封体设置于两个所述推进槽331之间,并与所述上部密封体固定连接,所述密封罐343设置于所述上部密封体与所述下部密封体的连接处,并包覆所述落水人员检测单元20。
23.在本实施方式中,所述上密封体341与所述下密封体342相互配合,从而使得所述密封罐343能得到初步保护,进而提升所述密封罐343对电气组件的保护效果。
24.进一步的,所述摄像头监测单元10包括红外摄像头11和监控终端,所述红外摄像头11设置于所述外壳体33的上侧,所述监控终端与所述红外摄像头 11电性连接,并设置于外界。
25.在本实施方式中,所述红外摄像头11用以拍摄图像,并将拍摄的图像送至所述落水人员检测单元20和所述监控终端,而所述监控终端用以接收所述红外摄像头11拍摄的画面以及从所述落水人员检测单元20传来的警告信息。
26.进一步的,所述红外摄像头11包括支撑柱12和转动轴承13,所述支撑柱 12设置于所述转动轴承13的上侧,所述转动轴承13设置于所述外壳体33的上侧,并与所述支撑柱12转动连接。
27.在本实施方式中,所述支撑柱12用以支撑所述红外摄像头11,所述转动轴承13则用以让所述支撑柱12转动,进而使得所述红外摄像头11可以多角度的拍摄画面,进而便于监控。
28.以上所揭露的仅为本实用新型一种较佳实施例而已,当然不能以此来限定本实用新型之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本实用新型权利要求所作的等同变化,仍属于实用新型所涵盖的范围。