1.本实用新型涉及海洋观察的技术领域,特别涉及一种锚系式海底观测悬台。
背景技术:
2.在进行海洋科考时,经常要对海底的某个目标物进行长期连续的观测。由于深海区域人类无法达到,即使目前的深潜器能达到,也无法进行长期的停留和固定,因此目前对海床基进行科考作业,一般采用投放坐底观测平台,即通过投放三脚架或者四角架装置到海底,架子上安装测量观测仪器和蓄电池装置进行等。多脚架的投放存在较多的技术困难和不确定性因素。比如:投放海床面不平整、或者观测过程中沉积塌陷等均可能会导致架子倾覆,导致科考失败;需要对海底原有目标物进行观测,投放下去的位置点,可能偏离较远而无法观测,也可能刚好砸到目标物而破坏;需要对人造模拟目标物进行观测时候,要同时把多脚架和目标物同步投放下去,多脚架能和目标物按照设计要求着陆的成功率更是非常低。
技术实现要素:
3.本实用新型的目的在于提供一种锚系式海底观测悬台,以解决科考过程中容易出现支架倾覆的问题。
4.为了解决上述技术问题,本实用新型提供了一种锚系式海底观测悬台,包括浮球、悬台和底框;所述浮球与所述悬台顶面之间连接有第一链索;所述悬台的底面设有观察传感器和遥控释放器,所述遥控释放器与所述底框之间连接有第二链索,所述遥控释放器用于在接收指令后解除与所述第二链索的连接;所述底框上设有配重块和平衡侧翼,多个所述平衡侧翼以可转动的方式设于所述底框的周侧,所述平衡侧翼具有往所述悬台方向转动的预设翻转角度范围。
5.在其中一个实施例中,所述底框上设有多个脱离机构,多个所述脱离机构分别与多个所述平衡侧翼连接,在所述锚系式海底观测悬台着陆时,所述脱离机构用于解除与所述平衡侧翼的连接。
6.在其中一个实施例中,所述脱离机构包括套管和滑动卸扣;所述套管内设有弹簧,所述滑动卸扣的一端插入所述套管内,所述弹簧用于推动所述滑动卸扣移出所述套管;所述滑动卸扣包括挡板、撑脚、连接杆和卸扣杆;所述挡板设于所述套管内,所述挡板与所述弹簧抵接;所述撑脚设于所述套管外;所述连接杆连接于所述挡板与所述撑脚之间;所述卸扣杆设于所述挡板与所述撑脚之间,所述卸扣杆的一端与所述挡板连接,所述卸扣杆的另一端悬空;所述平衡侧翼包括翼板、连接轴和滑动环;所述翼板与所述连接轴转动连接,所述连接轴相对的两端均连接有所述滑动环,所述滑动环套于所述卸扣杆外;所述撑脚的受压用于推动所述卸扣杆往所述套管内移动,所述卸扣杆往所述套管内的移动用于解除与所述滑动环的套接。
7.在其中一个实施例中,所述翼板为悬浮材质制成的板块。
8.在其中一个实施例中,所述遥控释放器包括两个并联设置的信号接收器,两个所述信号接收器均用于在接收指令后解除所述遥控释放器与所述第二链索的连接。
9.在其中一个实施例中,所述遥控释放器为接收声学信号的释放器。
10.在其中一个实施例中,所述预设翻转角度范围为0
°
~60
°
。
11.本实用新型的有益效果如下:
12.由于所述浮球与所述悬台顶面之间连接有第一链索,所以在悬台下沉时,浮球能对悬台施加向上的拉力,而所述悬台的底面设有观察传感器和遥控释放器,所述遥控释放器与所述底框之间连接有第二链索,所述底框上设有配重块和平衡侧翼,多个所述平衡侧翼以可转动的方式设于所述底框的周侧,所述平衡侧翼具有往所述悬台方向转动的预设翻转角度范围,则可通过配重块对悬台施加向下的拉力,以实现悬台的下沉,此时平衡侧翼自适应进行翻转,则可保证悬台的受力平衡,从而确保悬台下沉过程的平稳,以避免出现倾覆现象,同时着陆后侧翼自动漂浮离开,以减少观测平台对周围环境的干扰和破坏。
附图说明
13.为了更清楚地说明本实用新型的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
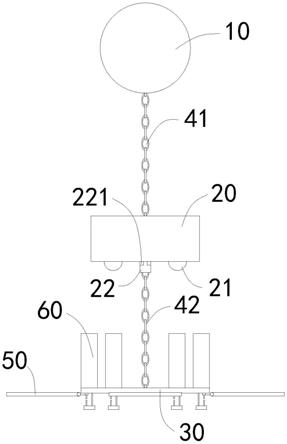
14.图1是本实用新型锚系式海底观测悬台实施例提供的结构示意图;
15.图2是图1的底框俯视结构示意图;
16.图3是图1的平衡侧翼与脱离机构装配结构示意图;
17.图4是图3的平衡侧翼转动状态结构示意图;
18.图5是图3的平衡侧翼脱离结构示意图。
19.附图标记如下:
20.10、浮球;
21.20、悬台;21、观察传感器;22、遥控释放器;221、信号接收器;
22.30、底框;31、配重块;
23.41、第一链索;42、第二链索;
24.50、平衡侧翼;51、翼板;52、连接轴;53、滑动环;
25.60、脱离机构;61、套管;62、滑动卸扣;621、挡板;622、撑脚;623、连接杆;624、卸扣杆;63、弹簧。
具体实施方式
26.下面将结合本实用新型实施方式中的附图,对本实用新型实施方式中的技术方案进行清楚、完整地描述。
27.本实用新型提供了一种锚系式海底观测悬台,其实施例如图1和图2所示,包括浮球10、悬台20和底框30;浮球10与悬台20顶面之间连接有第一链索41;悬台20的底面设有观察传感器21和遥控释放器22,遥控释放器22与底框30之间连接有第二链索42,遥控释放器22用于在接收指令后解除与第二链索42的连接;底框30上设有配重块31和平衡侧翼50,多
个平衡侧翼50以可转动的方式设于底框30的周侧,平衡侧翼50具有往悬台20方向转动的预设翻转角度范围。
28.在进行应用时,应先对锚系式海底观测悬台进行调试,以确保锚系式海底观测悬台处于正常稳定的工作状态,然后便可利用吊机悬吊锚系式海底观测悬台,以此进行投放操作。
29.在锚系式海底观测悬台下沉的过程中,配重块31用于带动锚系式海底观测悬台下沉,浮球10用于为锚系式海底观测悬台提供上浮力,所以在配重块31和浮球10的相互作用下,锚系式海底观测悬台将可以稳定的速度下沉;而且此时平衡侧翼50在水流及自身浮力的作用下,从水平状态自动向上翻转,从而产生一个向上托力,该力在沿着倾斜面分解后,产生一个与平衡侧翼50垂直向上的托举分力,以及一个沿着平衡侧翼50向外的拉力,在各个平衡侧翼50组合产生的的拉力下,底框30保持水平不倾覆,同时又能自动根据下沉速度自动平衡调整倾斜开角,具体的,此实施例优选设置预设翻转角度范围为0
°
~60
°
,即平衡侧翼50能够从水平状态变为往上翻转60
°
的状态,以满足大多情况的调整需求。
30.而在着陆后,则可利用各种观察传感器21进行考察,待考察结束后,对遥控释放器22发送相关指令,遥控释放器22将会解除与第二链索42的连接,然后浮球10便可带动悬台20上浮,以此实现悬台20的回收利用。
31.综上可知,此实施例利用配重块31实现了悬台20的下沉,而浮台则减缓了下沉速度,而且此时平衡侧翼50自适应进行翻转,则可保证悬台20的受力平衡,从而确保悬台20下沉过程的平稳,以避免出现倾覆现象,切实解决了科考过程中容易出现支架倾覆的问题。
32.如图1至图5所示,底框30上设有多个脱离机构60,多个脱离机构60分别与多个平衡侧翼50连接,在锚系式海底观测悬台着陆时,脱离机构60用于解除与平衡侧翼50的连接。
33.在设置脱离机构60后,若锚系式海底观测悬台进行着陆,将会触发脱离机构60解除与平衡侧翼50的连接,自动漂浮离开,以此实现底框30着落后的减少观测平台对周围环境的干扰和破坏。
34.具体的,此实施例的脱离机构60包括套管61和滑动卸扣62;套管61内设有弹簧63,滑动卸扣62的一端插入套管61内,弹簧63用于推动滑动卸扣62移出套管61;滑动卸扣62包括挡板621、撑脚622、连接杆623和卸扣杆624;挡板621设于套管61内,挡板621与弹簧63抵接;撑脚622设于套管61外;连接杆623连接于挡板621与撑脚622之间;卸扣杆624设于挡板621与撑脚622之间,卸扣杆624的一端与挡板621连接,卸扣杆624的另一端悬空;平衡侧翼50包括翼板51、连接轴52和滑动环53;翼板51与连接轴52转动连接,连接轴52相对的两端均连接有滑动环53,滑动环53套于卸扣杆624外;撑脚622的受压用于推动卸扣杆624往套管61内移动,卸扣杆624往套管61内的移动用于解除与滑动环53的套接。
35.以图3和图5所示方向为参考,在锚系式海底观测悬台未着陆时,弹簧63对挡板621施加往下的推力,所以滑动卸扣62将往下移动,从而确保卸扣杆624能够穿过滑动环53,以稳定脱离机构60与平衡侧翼50之间的连接固定;待锚系式海底观测悬台进行着陆时,撑脚622将会承受往上的推力,从而导致卸扣杆624往套管61内移动,直至卸扣杆624与滑动环53相互分离后,平衡侧翼50与脱离机构60将相互分离,以此确保锚系式海底观测悬台着陆的平稳放置和减少观测平台对周围环境的干扰和破坏。
36.其中,此实施例优选设置翼板51为悬浮材质制成的板块,譬如可以是模板、塑料泡
沫板等,以便平衡侧翼50与脱离机构60分离后,平衡侧翼50能够迅速上浮分离。
37.如图1所示,遥控释放器22包括两个并联设置的信号接收器221,两个信号接收器221均用于在接收指令后解除遥控释放器22与第二链索42的连接。
38.信号接收器221用于接收指令,由于两个信号接收器221为并联连接,所以无论是哪个信号接收器221接收指令后,均能实现对遥控释放器22的操控,此设置方式的好处在于,即使其中一个信号接收器221产生故障,另一个信号接收器221也能控制遥控释放器22正常工作,从而为锚系式海底观测悬台的正常稳定工作提供了重要保障。
39.其中,为确保信号传输的稳定性,此实施例优选设置遥控释放器22为接收声学信号的释放器,以确保与深海应用环境相匹配。
40.以上所述是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本实用新型的保护范围。