1.本发明涉及水面垃圾清理技术领域,具体为一种基于阿里云及卷积神经网络算法的水面清洁机器人打捞系统。
背景技术:
2.随着人民生活水平的日益提高,环境问题也是日益严重,尤其为水污染问题,已经贯彻到每个领域,使得水域的保护和清洁就显得更为重要,这时就需要一种装置来帮助人们完成水资源的保护。目前市面上主要是人工打捞,这种传统打捞方式风险高、效率低,工作环境差;其次是打捞船打捞,应对恶劣水域环境工作效率低,如船体移动靠近垃圾时,产生向外的水流,导致垃圾出现远离船体漂浮不易打捞。其次,在水草较多的水域,由于水草具有联结性,船开至其中时水草会不断聚拢缠绕,容易出现船桨卡死的问题,最终导致打捞效率低下。
3.为了解决上述问题,本案由此而生。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种基于阿里云及卷积神经网络算法的水面清洁机器人打捞系统,解决了上述背景技术中提出的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种基于阿里云及卷积神经网络算法的水面清洁机器人打捞系统,包括船体,船体的后侧设有螺旋桨,螺旋桨通过置于船体底部的螺旋桨电机驱动转动,船体的前侧设有通过设于船体的动力系统驱动的垃圾传递带,船体的中部设有垃圾收集箱,所述垃圾传递带倾斜布置,其下端位于水面下方,上端置于垃圾收集箱内,连接所述螺旋桨转动的转轴以及驱动转轴转动的电机之间设有密封套,所述船体在左右两侧分别设有气泵一,船体后侧的底部设有气泵二,所述船体上设有收集聚拢装置,收集聚拢装置包括设于船体前侧的左右收集拓展网和底部的阻拦装置,其中左右收集拓展网用于聚拢船体前侧的垃圾,阻拦装置配合气泵一使用,以在转向时收集船体底部以及侧边的垃圾。
8.优选的,所述左右收集拓展网搭载舵机,以及实现0-45
°
转动控制。
9.优选的,所述阻拦装置包括设于船体底部两侧的阻拦板,两个阻拦板在竖直方向交错布置,且上端分别连接有齿牙板,两个所述齿牙板分别间隔交错布置,且在中部设有与之啮合的齿轮,两个齿轮的轴心线重合,且套于一转轴上,所述转轴通过置于船体外壁的电机进行驱动转动,使得两块齿牙板做一上一下的交叉作业,其中齿牙板的使用为配合船体转向时的打捞作业。
10.优选的,所述船体底部设有推动板,推动板的两端与阻拦板的内侧相衔接,所述推
动板通过气缸带动伸缩,进而能够沿船体长度方向推动。
11.优选的,所述垃圾传递带上设有阻拦条,阻拦条的外侧端连接倒刺。
12.优选的,所述垃圾收集箱安置在船体中部,垃圾收集箱的上侧设有两个提携杆,侧边设有对称支撑块,所述支撑块置于船体上表面。
13.其中基于阿里云及卷积神经网络算法的水面清洁机器人,包括微处理器控制系统、视觉处理系统、动力控制系统、交互系统、电源及各类传感器,微处理器控制系统以stm32单片机为核心板,视觉处理系统包括摄像头和工控机,动力控制系统包括驱动系统板、螺旋桨电机、气泵推进器,传感器包括gps/北斗导航定位模块、mpu6050姿态传感器、前方超声波传感器、左侧超声波传感器、右侧超声波传感器,交互系统包括nb-iot模组、阿里云物联网平台及pc端交互,即终端云平台。
14.视觉处理系统方面结合了在pytorch平台搭建的yolov3目标识别平台,使用darknet53主干特征提取网络,利用残差网络residual来适当的增加网络深度来提高准确率,用对内部的残差块进行条约连接,用以解决梯度消失的问题;通过构建fpn特征金字塔进行加强特征提取,以及利用yolo head对三个有效特征层进行预测可以从特征层得到三个特征层的预测结果,三个特征层会将整个图片分成与其长宽对应的网格,然后在各个网格建立检验框,判断其中是否有物体以及物体的种类;对预测结果进行解码,给每个网格的加上x_offset和y_offset,得到预测框的中心,然后利用检验框和h,w计算出预测框的宽和高,对得到的结果进行得分排序和非极大抑制筛选,就可以得到预测框在原图上的位置;将筛选后的抑制框画在原图上得到识别结果。
15.(三)有益效果
16.采用上述技术方案后,本发明与现有技术相比,具备以下优点:本发明通过设置阻拦装置以及设于船体两侧的气泵,能够在水草较多的恶劣水域进行高效打捞,且配合左右收集拓展网,能够提高每次的垃圾收集量,防止行进时产生向外的水流导致垃圾不能被顺利打捞。其次,在船体上设置机器人系统,能够快速识别水面上的垃圾、水草等杂物并快速靠近实现打捞。
附图说明
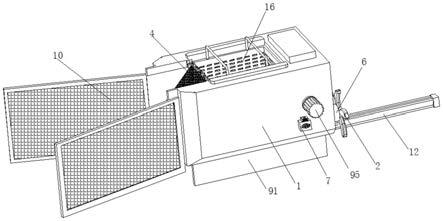
17.图1为本发明示意图;
18.图2为本发明仰面示意图;
19.图3为本发明船体后侧局部结构示意图;
20.图4为本发明阻拦装置结构示意图;
21.图5为本发明垃圾收集箱示意图;
22.图6为本发明垃圾传递带结构示意图;
23.图7为本发明控制系统结构示意图;
24.图8为本发明垃圾识别控制流程图。
25.图中:1、船体;2、螺旋桨;3、螺旋桨电机;4、垃圾传递带;5、垃圾收集箱;6、密封套;7、气泵一;8、气泵二;9、阻拦装置;91、阻拦板;92、齿牙板;93、齿轮;94、转轴;95、电机;10、左右收集拓展网;11、推动板;12、气缸;13、阻拦条;14、倒刺;15、提携杆;16、支撑块;17、终端云平台;18、摄像头;19、gps/北斗定位模块;20、mpu6050姿态传感器;21、stm32单片机;
22、前方超声波;23、左侧超声波;24、右侧超声波;25、驱动系统;26、螺旋桨电机;27、气泵推进器;28、nb-iot模组;29、工控机。
具体实施方式
26.下面通过附图和实施例对本发明作进一步详细阐述。
27.如图1-8所示:一种基于阿里云及卷积神经网络算法的水面清洁机器人打捞系统,船体1前端安装超声波模块,用于前方避障,其上方还安装有一摄像头18,收集前方图像、对前方物体进行识别、处理。
28.船体1后侧装有船体1控制板等控制装置,且后侧有对称的两个安装孔,连接有螺旋桨2,螺旋桨2中的螺旋桨电机3与控制板相连,螺旋桨2始终呈垂直状态,保证船体1控制的平衡。
29.连接螺旋桨2转动的转轴94以及驱动转轴94转动的电机95之间设有密封套6,避免垃圾、水草缠绕堵转。
30.垃圾收集箱5安置在船体1中部的槽口内,垃圾收集箱5有两个提携杆15以及对称的支撑块16,支撑块16置于船体1上表面,用于搭载在船体1上并可快速取下,达到垃圾清理转移目的。
31.船体1前端设有垃圾传递带4,并通过动力系统驱动传导。垃圾传递带4倾斜布置,其下端位于水面下方,上端置于垃圾收集箱5内。垃圾传递带4表面间隔布置有阻挡条,避免垃圾出现滑落问题(采用常规的链带式传送带,动力系统为齿轮93、电机95结构)。
32.船体1在左右两侧分别设有气泵一7,两侧的气泵一7通过产生推力用于辅助船体1的转向推进,气泵一7的推送力相对船桨的变向可控性更高,通过气泵推动作业带动船体1缓缓转动不断改变朝向,配合收集聚拢装置使得船体1周向乃至底部的水草不断被聚拢收集,并通过垃圾传递带4运送打捞,打捞效率更高。
33.其次,在船体1后侧的底部设置气泵二8用于在螺旋桨2停止作业时辅助船体1缓缓向前推进。同时,气泵二8的设置,可将螺旋桨2周边的水槽冲散开,避免进一步出现水草缠绕问题,可应对水草聚集的水域进行作业。
34.船体1上设有收集聚拢装置,包括设于船体1前侧的左右收集拓展网10,其中左右收集拓展网10搭载舵机可实现0-45
°
转动控制,使垃圾清理区域变广,提高清洁效率。
35.进一步的,收集聚拢装置还包括设于船体1底部两侧的阻拦板91,两个阻拦板91在竖直方向交错布置,且上端分别连接有齿牙板92,两个齿牙板92分别间隔交错布置,且在中部设有与之啮合的齿轮93,两个齿轮93的轴心线重合,且套于一转轴94上,转轴94通过置于船体1外壁的电机95进行驱动转动,使得两块齿牙板92做一上一下的交叉作业。
36.阻拦板91的底部可设置刀刃,尤其是在水草较多时能够对其进行割断而便于快速打捞。
37.阻拦板91主要配合气泵一7进行使用,在转向时,使得下方、侧边的水草或杂物垃圾被相应侧的阻拦板91聚拢在船体1的下方,由此,本方案进一步设置推动板11,推动板11设于船体1下方,并能够沿船体1长度方向推动(可通过气缸12进行驱动),使得船体1底部的水草或杂物垃圾被推至靠近垃圾传递带4聚拢。其次,在阻挡条外侧端连接倒刺14,使得能够将靠近的垃圾勾住收集,也即垃圾传递带4后侧接触部分的垃圾也能被收集打捞,清理效
率更高。
38.如图7-8所示,机器人系统包括微处理器控制系统、视觉处理系统、动力控制系统、交互系统、电源及传感器,微处理器控制系统以stm32单片机21为核心板,视觉处理系统包括摄像头18和工控机29,动力控制系统包括驱动系统25板、螺旋桨电机26、气泵推进器27,传感器包括gps/北斗导航定位模块、mpu6050姿态传感器20、前方超声波22传感器、左侧超声波23传感器、右侧超声波24传感器,交互系统包括nb-iot模组28、阿里云物联网平台及pc端交互,即终端云平台17。电源为12v/24v直流蓄电电源。
39.控制系统包括stm32单片机21、nb-iot模块、摄像头18、工控机29、超声波模块、气泵、螺旋桨电机与电调、gps定位、姿态识别模块。气泵和超声波与stm32单片机21连接,螺旋桨电机与电调连接,电调与stm32单片机21连接,gps及姿态识别模块、nb-iot模块均与stm32单片机21连接。摄像头18连接在工控机29,经其处理后与stm32单片机21相连。stm32单片机21、工控机29、nb-iot模块、电调、gps定位、姿态识别模块均安装在后侧船体1内部。
40.本发明在视觉处理系统方面结合了在pytorch平台搭建的yolov3目标识别平台。使用darknet53主干特征提取网络,利用残差网络residual来适当的增加网络深度来提高准确率,用对内部的残差块进行条约连接,用以解决梯度消失的问题。通过构建fpn特征金字塔进行加强特征提取,以及利用yolo head对三个有效特征层进行预测可以从特征层得到三个特征层的预测结果,三个特征层会将整个图片分成与其长宽对应的网格,然后在各个网格建立检验框,判断其中是否有物体以及物体的种类。对预测结果进行解码,给每个网格的加上x_offset和y_offset,得到预测框的中心,然后利用检验框和h,w计算出预测框的宽和高,对得到的结果进行得分排序和非极大抑制筛选,就可以得到预测框在原图上的位置。将筛选后的抑制框画在原图上得到识别结果。
41.船体1系统工作过程如下:由摄像头18采集图像数据,传输至工控机29,工控机29利用训练好的cnn神经网络模型对画面中的垃圾进行识别,处理将垃圾中心坐标通过串口发送至stm32单片机21,stm32单片机21根据指令及pid算法驱动螺旋桨2到达坐标指定位置,根据坐标离原点(船位置)的远近进行依次清理,若前方没有监测到垃圾,则无人船进行巡逻状态直线行走。
42.以上所述依据实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明思想的范围内,进行多样的变更以及修改。本项使用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其保护的范围。