1.本发明涉及一种用于船体水下监测和维护的机器人,以及一种使用该机器人在船舶航行时监测和维护船舶水下船体的系统和方法。更具体地说,本发明涉及上述机器人以及一种使用该机器人的方法和系统,该机器人能够在船舶的商业运输速度期间去除生物污垢、检查、降低粗糙度和对船体执行其他服务。
背景技术:
2.船体的维护和检查通常在干船坞进行。干船坞检查和维护费用昂贵,耗时,并且船舶无法工作。在水外进行工作的另一个缺点是,不能在工作环境中进行检查,这意味着人们对流动模式知之甚少。了解航行过程中真实的流动模式可以提供信息以改善操作和燃油经济性。包含清洁和表面处理工具的作业机可以去除船体上的生物污垢,减少船体阻力,从而提高燃油经济性。
3.生物污垢是航运的主要挑战,因为船体上的污垢会大大增加阻力,降低船舶的流体动力性能并显着增加燃料消耗。生物污垢始于附着在船体表面的薄生物膜,为较大的植物、贻贝和藤壶附着在船体上创造了良好的条件。如果不清除,生物污垢可能会形成厚厚的有机质层,从而导致生态系统固定在船体上。根据国际海事组织的说法,生物污垢是将有害物种扩散到新地点的主要来源,这种扩散对环境来说是有害的。
4.防污漆,其中一些是通过流体流动自抛光,用于减少生物污垢的形成和粘附,并延迟生物膜和更严重的生物污垢的形成。此外,生物污垢还包括对环境有害的化学物质,其中许多在最近几年已禁止使用。尽管涂装行业正在努力开发对环境影响较小的更高效的防污剂,但防污剂只能延缓生物污垢的发展,而不能阻止生物污垢的形成。
5.最常见的清洗方法是在干船坞中进行高压清洗,高压清洗会增加油漆的粗糙度。该过程是手动的,很少结合自动化过程控制来保持涂在船上的油漆的粗糙度。因此,事实是清洗会降低船体的长期性能。
6.已经提出了几种清洗船体而不需要将船体放在干船坞中的概念。这些概念旨在通过去除有机材料来改善船体的水动力性能。
7.众所周知,使用远程遥控车辆(rov)来检查和清洗船体的外侧,例如参见kr20170065916a,wo01171874a1,us2011282536a1,us5947051和dk201670635a1,当船体在港口或停泊时,rov可能是清洁和擦洗船体的好解决方案,但由于过大的阻力,船体在水中移动时不合适使用。
8.此外,一些专利描述了用于在航行期间擦洗船舶的设备,设备由绳索或小孔控制,其中一些具有由船舶和水之间的速差提供动力的旋转刷。参见例如us826012a、us702965a、ep1390257a1、us2093434a和gb2038721a。用毛刷进行清洗的目的是为了快速去除生物污染,而不是为了保持油漆质量。
9.gb2038721a、us826012a和su893713a描述了使用可控舵来控制装置的深度位置的船体清洗设备,并使用水翼使设备保持靠在船体上。这些出版物描述了涡轮机的使用和增
加海水阻力的先进特性。如果船体以商业运输速度(例如6
‑
8m/s)运行,阻力将非常大,舵将无法克服有效操纵机器人位置所需的力。因此,涡轮机、水翼和结构元件在产生阻力方面占主导地位,这又使控制设备变得困难,甚至无法进行。us 826012a训练了4种不同的绳索和起重机,以实现该单元的方向性。gb2038721a提出了在单元背面的一根单独的绳来控制方向,以便单元可控制的应用在船体上。su893713a,也通过使用多条控制线来控制装置的位置来解决与控制有关的问题。
10.wo2005014387a1涉及一种用于在前进的船舶上清洁海船船体外部的装置。该装置连接到滑架,该滑架与至少一个固定在船体上的导轨移动接合,该滑架可通过电动驱动装置沿导轨移动。船体通过旋转刷进行清洗,该旋转刷由从船体上接收动力的电机提供动力,或者由至少一个通过在水中运动提供动力的涡轮机驱动。在将装置部署到水中时,装置没有正定向来确保装置以正确的一侧抵靠船体上。如果装置以错误侧面朝向船体抵靠,设备和/或船体可能会损坏。由于旋转刷、电机、控制机构和涡轮的结构复杂,清洗单元的水动力效率低下,造成过度阻力。复杂的设备引起阻力,驱动舵的转向力和来自装置的阻力之间产生的合力矢量将与密度一起确定绳索与水平面的偏离角。因此,该设备需要具有一个与水平面有小偏差角的锚固点,通过一个可移动的绳锚固点进行补偿,以到达船体大部分的措施。
11.根据wo2005014387a1的设备相对复杂的情况,该设备除了需要一个或多个固定在船体上的轨道外,还具有多个移动部件。所有的技术特征都体积庞大,在运输过程中产生过大的阻力,并使装置操作起来很复杂。与舵力相比,阻力将较大,导致绳索的偏离角较低,从而使一个单元无法到达船体的大部分区域。
技术实现要素:
12.本发明的目的是提供一种用于在船舶低速时维护和检查船体外部的方法和装置,它比前面描述的方法和装置更简单、更可靠。
13.在阅读本说明书后,其他目的对于技术人员将是显而易见的。
14.根据第一方面,本发明涉及一种用于在船舶航行时,对船体1进行水下监测和维护的机器人,其中该机器人包括主体,该主体具有前部和和与直的中部连接的后端,主体的前部设置有用于将机器人连接至用于拖曳机器人的缆绳的连接器,采用靠在船体上并沿主体的整个长度设置的支撑底座,一个或多个垂直于主体的长度轴排列的水翼,以推动机器人的支撑底座朝向船体,舵设置在主体的前部,垂直于主体的长度轴和水翼,其中,主体是一个长宽比为5或5以上的直且细长的主体,其中垂直于主体的水翼的长度比主体的宽度长,并且缆绳缆绳的连接器设置在水翼的一端,或在一个或多个水翼平行延伸的臂上。监测和/或维护船体的操作期间,细长且直的主体对于机器人的方向稳定性至关重要。直且细长的主体与用于缆绳的连接器相结合,以侧向偏移的方式设置,即当机器人在操作中时,在与船体表面基本平行的方向上与主体的长度轴偏移,在机器人部署过程中,确定机器人接近船体时的正确定向非常重要。
15.根据一个实施例,所述主体的前部设置有前水翼,在所述主体的后端设置有后水翼,所述水翼彼此基本平行且平行于所述支撑底座所限定的平面。
16.根据一个实施例,固定的减摇鳍设置在主体的后端,基本上与其垂直并且垂直于
一个或多个水翼。设置在主体的后端的固定的减摇鳍进一步提高了机器人的方向稳定性,确定了机器人的主体的长度轴基本上平行于沿船体的水流动方向。通过保持主体的方向稳定,并与水流基本平行,水流经机器人产生机器人的阻力和侧向力。因此,通过舵更容易控制机器人的横向运动。
17.根据一个实施例,固定的减摇鳍是主体整体的一部分。
18.根据一个实施例,用于连接缆绳的连接器设置在靠近前水翼的外端。将连接器设置在前水翼的外端。
19.在前水翼的同一端可设置一个靠在船体上的支脚,作为缆绳的连接器。
20.根据一个实施例,前水翼围绕主体不对称地设置,其中前水翼上固定缆绳的部分比主体相对侧的部分长。
21.支撑表面的外表面可包括一个或多个固定刷、硬辊、刮屑和/或研磨性材料。
22.根据一个实施例,支撑底座或其元件是可互换的。可互换的底座和/或可互换的底座元件,可以更换磨损的刷子、滚轮、刮擦物和/或研磨材料,或根据具体需要更换为支撑底座。
23.可以在机器人上设置一个或多个传感器、摄像机和带有数据采集的测试装置。
24.根据第二方面,本发明涉及一种在船舶航行时对船体进行水下监测和维护的方法,该方法包括以下步骤:
25.a)如上所述部署机器人,并允许机器人安装到船体上,
26.b)调整缆绳的长度,以调整机器人沿船体的纵向位置,
27.c)调整舵以调整机器人的深度,使机器人能够一次或多次穿过船舶的航行方向,
28.d)调整缆绳的长度,以调整机器人沿船体的纵向位置,
29.e)重复步骤c)和d),直到监测和/或维护到船体的预定区域。
附图说明
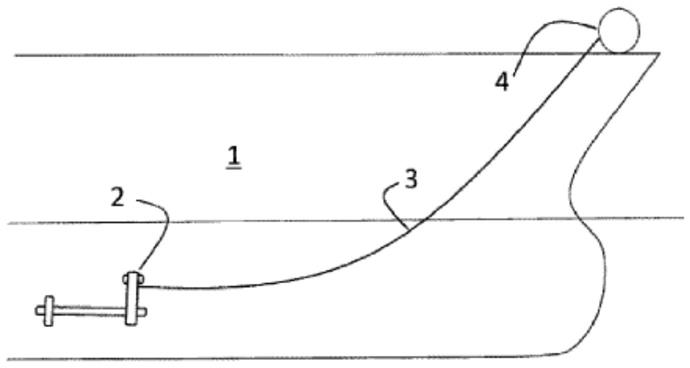
30.图1是本船体维护机器人在船体上运行的实施例的图示,
31.图2是本机器人的一个实施例的透视图,
32.图3是图2的实施例中停留在行动期间的船体上的侧视角的透视图,
33.图4是图2中的实施例的细节图,
34.图5是本机器人实施例中从左舷转换为右舷使用的图示,以及
35.图为本机器人可调节水翼船体的实施例示意图。
具体实施方式
36.图1是船体1和根据本发明的机器人2位于船体1上的最前部分的示意图,缆绳3固定在机器人2和安装在船体上的绞盘4上。缆绳的长度可以借助绞盘4来控制。
37.图中所示的机器人包括纵向主体5,前水翼6穿过主体5的前部,以及位于主体5尾部的后水翼7。前水翼6和后水翼7设置为相互基本平行,并且基本上垂直于主体5的长度轴线。舵8设置在主体的最前端,基本上垂直于主体5和前水翼6。固定的减摇鳍9基本上垂直于主体5和后水翼7。所示实施例中的前水翼并非围绕主体对称设置。在前水翼6的最长部分的末端设置有支脚10。在所示实施例中,用于将机器人2连接到用于拖曳机器人2的缆绳3的连
接器21设置在前水翼6的最长部分的外端。
38.主体5包括由中间部分连接的前端和后端,是直的细长主体,其形状在使用机器人时产生最小的阻力。沿主体5的侧面设置有表面基本平坦的支撑底座13,当机器人在使用中时,该支撑底座旨在靠在船体上。支撑基座13沿着主体的大部分长度延伸,并且基本上在其总宽度上延伸。靠在船体上的支撑底座的表面取决于要进行的操作。如果机器人仅用于监测目的,则支撑底座上应覆盖光滑的表面,以使机器人与船体之间的摩擦最小。为了进行维护操作,支撑底座具有适合该操作的表面,可以包括刷子、研磨剂、刮刀、滚轮等。支撑底座可以分为两个或多个元件,这些元件可以由相同或不同表面材料覆盖,用于预期的维护操作。刮刀和滚轮可用于压碎或去除藤壶等,具有普通的或具研磨性的刷毛的刷子可用来去除生物膜和/或压碎的藤壶。研磨剂可用于支撑表面,以使船体的外表面光滑。另外,优选地,支撑表面或其元件是可互换的,以能够在不同的时间将机器人用于不同的目的,从而使机器人成为灵活工具。
39.通常,主体的长宽比为5或以上,即主体的长度是其宽度的至少5倍。更优选的长度比约为8,甚至可以是10或更高。主体的高长宽比,以及主体后部的减摇鳍和主体前部的舵的设置,使机器人稳定,使其在使用时更容易控制机器人的垂直运动。
40.图中所示的机器人的实施例具有与主体不对称设置的前水翼6,因为前水翼在主体的一侧比在其另一侧更长。在本实施例中,支脚10设置在前水翼最长部分的外端。缆绳3连接到连接器21,该连接器设置在靠近支脚10的前水翼处。
41.本机器人可通过简单起重机或类似装置进行部署,以将机器人从船舶甲板上的位置提升到悬挂在船舶一侧的位置。由于与前部或头部相比,机器人的尾部或近船尾的部分的矫直力矩大,缆绳,风会使尾部转向顺风,所以在机器人进入大海之前,悬挂在缆绳3上。当将机器人从低速的船体上下海时,机器人悬挂在缆绳3上,机器人的后部也将首先接触海,并导致机器人转动,从而使机器人的后部面向下游。缆绳3连接点的主体长度轴的不对称设置对于获得所需的机器人定向非常重要,无需使用任何专用设备将机器人放入海中。
42.水翼6、7呈翼形,并且设置成使它们在限速和水下将推动主体5和支脚10朝向船体,使前后水翼设置与船体基本平行,减摇鳍和舵8基本上垂直于船体。优选地,靠在船体的支脚10的表面是光滑的,并可选地由低摩擦材料覆盖,以使对船体的摩擦最小。或者,一个或多个滚轮可以设置在支脚10以上,以进一步减少摩擦。
43.清洁装置13设置在位于停靠在船体1处的主体表面。清洁装置可以是刷子、磨料表面、刮刀、一个或多个滚轮等,或是一种或多种上述清洁装置的组合,所述清洁装置取决于要去除或减少的污垢的性质。与清洁装置13的类型无关,清洁动作是由机器人在纵向或横向方向移动引起的,与使用旋转刷的现有技术方案相比,机器人的移动部件的数量减少到最低。清洁装置13使用刷子去除相对软的污垢,如黏液、藻类、海藻和海带。在用刷子去除之前,可能需要用硬质材料或刮刀来压碎藤壶或贻贝。可以使用磨料表面,或具有磨料刷毛的刷子,使船体表面平滑,以减少船体和水之间的摩擦。此外,抛光后结垢减少,因为结垢不像固定在不太光滑的表面那样容易的固定在光滑的表面上。
44.通常,当船舶以一定速度巡航并在公海中航行时使用本机器人。船舶的速度可能因船舶的类型和船体上是否有货物而不同。一艘装满油的大型油轮的典型速度是12
‑
15节,而压舱物下的速度可能约为该速度的一半。其他船舶,如游轮和货船,可能比油轮前进的速
度更快,这取决于具体情况。
45.本发明机器人通过水的速度与翼形水翼6、7相遇而产生的力靠在在船体上。水翼产生的力取决于水翼轮廓上的水流速度,即船速、水翼相对于流动水的角度、和水翼的轮廓和水翼的尺寸。如果水翼产生的力过低,则清洁或抛光动作的效率会降低,或者机器人可能会偏离对船体的附着并进入周围的水中。如果作用力太大,则机器人与船体之间的摩擦力可能会太大,并且机器人在船体外表面上所需的运动将大大减少,甚至停止。
46.基于对船的正常速度的了解,可对给定的船舶设置一次机器人以船的给定速度朝向船体的力。或者,如果需要,可以在将机器人放入海中之前,或者通过任何远程可调节的方式来,调节水翼、水翼相对于水流或水翼的轮廓的附着角度,以调节至使机器人在不同情况下使用更加灵活。
47.图6示出了水翼6,7,它具有弹簧加载的襟翼20,用于自动调整襟翼,用于调整由水翼产生的朝向船体的力。本领域技术人员将理解,所示的弹簧可以替换为锁定装置,该锁定装置可在部署机器人之前进行调整,或由远程可控致动器进行调整。或者,可以通过调整水翼相对于水流的角度来调整水翼,优选地,通过允许水翼围绕水翼的前部附近旋转,轴平行于水翼的长度轴,并通过装置或螺丝等,或使用橡胶或其他柔性材料制成的水翼来调整水翼与流动水的角度。
48.为了清洗外部船体,如上所述,将机器人放入海里并自动定向,使机器人的长度轴基本上平行于长度轴和船体的外表面。通过舵8靠近主体的前端、减摇鳍9靠近主体的远端以及舵和减摇鳍之间的距离来获得该定向。然后通过舵8来控制机器人使其相对于机器人的长度轴侧向移动。通过在第一方向上旋转舵,在第一方向上推动机器人横穿由船舶引起的流动水的方向,反之亦然。通过将舵旋转到一个方向,允许机器人在将舵旋转到另一方向之前,可以在一定距离的横向行驶,从而使清洁表面6在船体的某个区域上行驶,同时清洁或抛光船体,取决于清洁表面6的性质。通过这种方式,机器人能够从水线横向移动到船底,从机器人连接到船舶的一侧清洁船底。
49.舭龙骨可能会成为机器人的障碍,这使得难以到达比舭龙骨更深的船体部分。然而,由于有阳光照射,靠近水线的污垢最严重,并且污垢问题随着深度的增加而减少。因此,在船舶停靠的间隔之间,从水线到舭龙骨的船体清洁通常是足够的。
50.在清洗了船舶的一个区域之后,在重新控制机器人之前,要调整缆绳的长度,如上段所述。优选地,调节缆绳的长度,使得通过缆绳的第一个长度清洗区域与下一次调节缆绳之后覆盖的区域略有重叠。通过这种方式,船体就可以逐段清洗。
51.图4示出了舵和舵的控制机构的一种实施例。本领域技术人员将理解,可以通过有线非有线通信装置来控制舵。舵8设置成基本垂直于机器人的长度轴线,当使用机器人时,舵8从船体指向。舵设置在舵轴15上,该舵轴可以通过致动器14控制。舵轴可以直接由致动器或如图所示通过齿轮控制。
52.优选地,舵是平衡舵,即舵的一部分设置在舵轴15的上游,并且一部分布置在下游的舵,从而抵抗舵旋转的作用力基本上相互抵消。平衡舵的使用减少了控制舵旋转所需的力,从而降低了控制机器人的功耗。通过使用平衡舵,机器人的功耗可以保持足够低,以使用设置在机器人内部的电池作为电源,避免通过缆绳供电。
53.由于从鸟瞰的角度来看,优选的机器人的主体是不对称的,该机器人配置为在船
的右舷或左舷使用。图5说明了如何松开前水翼和舵部分,并以从左舷转换为右舷旋转,反之亦然。
54.如上所述,将本机器人放入海中,并调整缆绳3的长度,使该机器人具有正确的纵向位置。然后,可以通过调整舵8使机器人向侧向移动,使机器人转向左舷或右舷。这种侧向移动会导致清洁表面靠着船体滑动。本领域技术人员将理解,目前的机器人不适合清洁螺旋桨、推进器和主动波阻尼器,并且清洁灯泡可能是一个挑战。然而,由于大部分船体可以通过目前的机器人清洗,当船舶在港口或锚泊时,船舶的这些部分可以通过其他方法清洗。
55.图7a
‑
7e说明了控制和调节机器人的不同配置。图7a对应于上述实施例,其中机器人的缆绳连接到绞盘,或者绞盘可以处于不同的位置,缆绳通过在标号4标识的点处的滑轮引导,该点设置在船舶甲板的最前部分。
56.或者,如图7b所示,缆绳可以通过设置在船体头附近的起重机17的吊臂连接到船舶。使用起重机将机器人放入海中并再次将其抬起时进行更好的控制,在升降机器人时,将保持机器人远离船体。此外,起重机可以到达图7a所示的结构中不可能或难以到达的最前区域。
57.图7c说明了图7a和7b配置的替代配置,其中缆绳从绞盘4延伸并越过设置在船体最前部的滑轮18,以便更好地接近船体的最前部分。
58.图7d和图7e说明了沿船甲板设置在未显示的轨道上的触轮19的使用。图7d示出了一种布置,其中机器人由与对应于图7c的布置中的缆绳(3)控制,此外,还由连接到机器人和触轮19的控制缆绳20在垂直方向控制。这种配置允许更好地在垂直和纵向方向上控制机器人。图7e对应于图7d,但移除了缆绳(3),使机器人仅由触轮和控制线控制。
59.本领域技术人员将理解,机器人的纵向位置可以通过缆绳(3)的长度来计算。清洁过程中的横向运动不容易预测或确认。为了获得机器人更精确的横向运动信息,并确认要清洁的表面已实际清洁,优选使用机器人和/或船体上提供的传感器。可以通过设置在机器人上的压力传感器来确认/计算关于机器人的横向运动和位置的信息,以随时测量机器人的深度,通过距离传感器测量到船舶上已知元件的距离,如舭龙骨,或水表面,和/或使用加速度计。通过结合来自这些可用来源的信息,可以计算出机器人的位置和运动,以确认机器人的位置和它已经覆盖了预期区域。
60.传感器、摄像机和测试设备也可以连接到机器人。监测船体、生物污垢状态、维护期间机器人覆盖的区域、对船体进行处理的是否成功、船体的损坏、流量测量和执行不同类型的无损检测方法等。来自传感器、测试装置和/或摄像机的数据存储在机器人的数据采集模块中,当机器人在船体上时进行采集,或通过无线通信或有线数据连接发送到船舶。
61.除了22米长的拖船和11米长的虾拖网渔船外,根据本专利的提出的两种不同设计的的机器人分别以3
‑5‑
7和9节的速度部署在高达2米深的水中。这些机器人的长度为1.2米至1.5米,质量为4至7公斤。在所有的测试中,机器人在接触到水时,立即与船体平行对齐,前端朝向船首,尾部朝向船尾,舵指向远离船体的方向。在所有以7节或以上速度进行的测试中,水翼在几秒钟内将机器人转向船体,从而使机器人的支撑底座靠在船体一侧。在所有7节或以上的测试中,机器人的主体与沿船体流动的水流的水平方向成5度以内。在所有的测试中,缆绳与垂直方向的夹角在45到30度之间,表明舵产生的力大于来自设备阻力的力。