1.本发明属于水面舰船航行性能技术领域,具体涉及一种敞水数据不完整情况下调距桨舰船特殊工况航速预报方法。
背景技术:
2.快速性预报是水面舰船设计过程中的重要环节。对于常规工况的航速预报方法较为成熟,根据桨模敞水试验得到的敞水数据、船模阻力试验得到的阻力数据和自航试验得到的推进效率,按相关规程即可进行航速预报。
3.对于依靠调距桨推进的高速水面舰船而言,其敞水数据较为复杂,包含了不同螺距和空泡数的曲线组。一般而言,敞水试验所采用的工况是根据螺旋桨的设计点确定的,其进速系数选取范围通常仅仅涵盖设计进速,在低进速下往往无相关试验数据。
4.对于常规工况下的航速预报,仅需要设计进速附近的敞水数据。然而对于特殊工况,如双桨水面舰船单轴锁轴工况、高海情工况、严重污底工况等,则需要低进速下的敞水数据。如果缺少低进速下的敞水数据,则无法进行该工况下的航速预报。
技术实现要素:
5.本发明要解决的技术问题在于针对上述现有技术存在的不足,提供一种敞水数据不完整情况下调距桨舰船特殊工况航速预报方法,该方法能够在调距桨敞水试验数据不完整情况下,实现对双桨水面舰船单轴锁轴工况、高海情工况、严重污底工况等特殊工况的螺旋桨推力计算和快速性预报。
6.本发明为解决上述提出的技术问题所采用的技术方案为:
7.一种敞水数据不完整情况下调距桨舰船特殊工况航速预报方法,包括以下步骤:
8.s1、针对给定的螺旋桨转速和螺距比,根据经验假定若干航速,计算每个航速下的空泡数和进速系数;
9.s2、针对敞水试验推力系数和转矩系数曲线组中的每一个螺距比和每一个空泡数的组合,根据上一步求得的进速系数进行插值,获得假定航速下的进速系数所对应的推力系数和转矩系数;如果进速系数在试验数据范围之外,则采用线性外插方法求取对应的推力系数和转矩系数;
10.s3、针对敞水试验推力系数和转矩系数曲线组中的每一个螺距比,基于上一步的插值结果进行插值,获得假定航速下的空泡数所对应的推力系数和转矩系数;如果空泡数超过敞水试验空泡数的范围,则取空泡数区间端点所对应的空泡数,获得对应的推力系数和转矩系数;
11.s4、基于上一步的插值结果,根据给定的螺距比插值,得到假定航速下的推力系数和转矩系数;
12.s5、根据s4所求的螺旋桨推力系数和转矩系数,求取螺旋桨推力和主机功率;
13.s6、根据不同航速下的船体阻力和螺旋桨推力,绘制船体阻力曲线和螺旋桨推力
曲线,求其交点,得到交点对应的航速即为给定的螺旋桨转速和螺距比下的预报航速。
14.上述方案中,步骤s1中,空泡数的计算公式为:
[0015][0016]
其中,σ为空泡数,p0为大气压力,p
v
为汽化压力,ρ为密度,v
a
为进速。
[0017]
上述方案中,步骤s1中,进速系数的计算公式为:
[0018][0019]
其中,j为进速系数,v
a
为进速,n为螺旋桨转速,d为螺旋桨直径。
[0020]
上述方案中,步骤s5中,根据螺旋桨推力系数(k
t
)、转矩系数(k
q
),求取螺旋桨推力(t
e
)和主机功率(n
e
)的公式为:
[0021]
t
e
=k
t
×
104.63
×
(n/60)2×
d4×
(1
‑
t)
[0022]
n
e
=k
q
×
2π
×
(n/60)3×
d5×
104.63/(η
s
×
η
r
×
102)
[0023]
其中,n为螺旋桨转速,d为螺旋桨直径,t为推力减额分数,η
s
为轴系传递效率,η
r
为相对旋转效率。
[0024]
本发明的有益效果在于:
[0025]
1、本发明提出的敞水数据不完整情况下调距桨舰船特殊工况航速预报方法,解决了在调距桨敞水试验数据不完整情况下,双桨船舶单轴锁轴工况、高海情工况、严重污底工况等特殊工况的快速性预报的问题。
[0026]
2、本发明方法首先根据已有的给定螺距和空泡数下的调距桨敞水试验数据,采用线性外插方法,求取进速系数在试验数据范围之外的敞水数据;对于空泡数,采用区间端点近似的特殊处理方法,即如果所求工况的空泡数超过敞水试验所涵盖的范围,则取试验所涵盖的空泡数区间的端点;对于任意螺距和空泡数下的敞水数据的求取,采用按照进速系数
→
空泡数
→
螺距顺序的三层插值方法;航速的预报采用螺旋桨推力与阻力平衡计算方法。本发明思路清晰、算法简洁、过程可靠、对极端工况的适用性强,是一种缺少试验数据时的快速计算方法。
附图说明
[0027]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0028]
图1是本发明实施例中螺距比为0.8、空泡数为0.7时的推力系数曲线;
[0029]
图2是本发明实施例中插值求取空泡数为4.618时的推力系数;
[0030]
图3是本发明实施例中插值求取螺距比为1.1时的推力系数;
[0031]
图4是本发明实施例中船体阻力曲线与螺旋桨推力曲线。
具体实施方式
[0032]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0033]
本发明提出了一种敞水数据不完整情况下调距桨舰船特殊工况航速预报方法,包括以下步骤:
[0034]
s1、针对给定的螺旋桨转速和螺距比,根据经验假定若干航速,计算每个航速下的空泡数和进速系数。
[0035]
空泡数的计算公式为:
[0036][0037]
其中,σ为空泡数,p0为大气压力,p
v
为汽化压力,ρ为密度,v
a
为进速。
[0038]
进速系数的计算公式为:
[0039][0040]
其中,j为进速系数,v
a
为进速,n为螺旋桨转速,d为螺旋桨直径。
[0041]
s2、针对敞水试验推力系数和转矩系数曲线组中的每一个螺距比和每一个空泡数的组合,根据上一步求得的进速系数进行插值,获得假定航速下的进速系数所对应的推力系数和转矩系数;如果进速系数在试验数据范围之外,则采用线性外插方法求取对应的推力系数和转矩系数。
[0042]
s3、针对敞水试验推力系数和转矩系数曲线组中的每一个螺距比,基于上一步的插值结果进行插值,获得假定航速下的空泡数所对应的推力系数和转矩系数;如果空泡数超过敞水试验空泡数的范围,则取空泡数区间端点所对应的空泡数,获得对应的推力系数和转矩系数;
[0043]
s4、基于上一步的插值结果,根据给定的螺距比插值,得到假定航速下的推力系数和转矩系数;
[0044]
s5、根据s4所求的螺旋桨推力系数和转矩系数,求取螺旋桨推力和主机功率。
[0045]
根据螺旋桨推力系数(k
t
)、转矩系数(k
q
),求取螺旋桨推力(t
e
)和主机功率(n
e
)的公式为:
[0046]
t
e
=k
t
×
104.63
×
(n/60)2×
d4×
(1
‑
t)
[0047]
n
e
=k
q
×
2π
×
(n/60)3×
d5×
104.63/(η
s
×
η
r
×
102)
[0048]
其中,n为螺旋桨转速,d为螺旋桨直径,t为推力减额分数,η
s
为轴系传递效率,η
r
为相对旋转效率。
[0049]
s6、根据不同航速下的船体阻力和螺旋桨推力,绘制船体阻力曲线和螺旋桨推力曲线,求其交点,得到交点对应的航速即为给定的螺旋桨转速和螺距比下的预报航速。
[0050]
以下通过一艘双桨推进的船舶单轴锁轴工况的快速性预报为例说明本发明的具体实施方式,本发明并不局限于下述用途和实施例。
[0051]
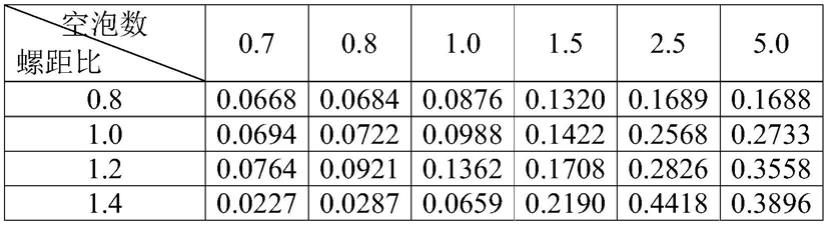
本船螺旋桨现有4个螺距比(分别为0.8、1.0、1.2、1.4)、6个空泡数(分别为0.7、0.8、1.0、1.5、2.5、5.0)工况下的敞水试验数据。对应每一个螺距比和空泡数的组合都有一条推力系数曲线和转矩系数曲线,例如图1是螺距比为0.8、空泡数为0.7时的推力系数曲线。图中,横坐标为进速系数,纵坐标为推力系数。
[0052]
现需预报螺旋桨转速为180r/min,螺旋桨螺距比为1.1时,该船单轴锁轴工况的航速,具体步骤如下。
[0053]
第一步:根据经验,螺旋桨转速为180r/min,螺旋桨螺距比为1.1时,该船单轴锁轴工况的航速在18kn左右,假定三个航速:16kn、18kn、20kn,计算每个航速下的空泡数和进速
系数,计算结果如下表1所示。
[0054]
表1每个航速下的空泡数和进速系数
[0055]
航速(kn)空泡数进速系数164.6180.600183.6490.675202.9550.750
[0056]
第二步:针对敞水试验推力系数和转矩系数曲线组中的每一个螺距比和每一个空泡数的组合,根据上一步求得的进速系数进行插值,获得假定航速下的进速系数所对应的推力系数和转矩系数;如果进速系数在试验数据范围之外,则采用线性外插方法求取对应的推力系数和转矩系数。例如,要求螺距比为0.8、空泡数为0.7的工况下,进速系数为0.600时(为16kn航速下对应的进速系数)的推力系数,则可按图1所示线性外插得到,图中的圆形数据点即为在进速系数0.600处的外插结果。针对每一个螺距比和空泡数,以进速系数0.600插值得到的推力系数如下表2所示。
[0057]
表2以进速系数0.600插值得到的推力系数
[0058][0059]
第三步:针对敞水试验推力系数和转矩系数曲线组中的每一个螺距比,基于上一步的插值结果进行插值,获得假定航速下的空泡数所对应的推力系数和转矩系数;如果空泡数超过敞水试验空泡数的范围,则取空泡数区间端点所对应的空泡数,获得对应的推力系数和转矩系数。例如,要求螺距比为0.8的工况下,空泡数为4.618时(为16kn航速下对应的空泡数)的推力系数,则以表2中螺距比为0.8的一行数据为原始数据,插值得到空泡数为4.618时的推力系数,如图2所示,图中实线为以空泡数为横坐标、推力系数为纵坐标绘制的曲线,图中圆形数据点为插值得到的空泡数为4.618时的推力系数。针对每一个螺距比,以空泡数4.618插值得到的推力系数如下表3所示。
[0060]
表3以空泡数4.618插值得到的推力系数
[0061]
螺距比推力系数0.80.16881.00.27071.20.34461.40.3976
[0062]
第四步:基于上一步的插值结果,根据给定的螺距比插值,得到假定航速下的推力系数和转矩系数。例如,要求螺距比为1.1时的推力系数,则以表3为原始数据,插值得到螺距比为1.1时的推力系数,如图3所示,图中实线为以螺距比为横坐标、推力系数为纵坐标绘制的曲线,图中圆形数据点为插值得到的螺距比为1.1时的推力系数。所有航速下的推力系
数和转矩系数如下表4所示。
[0063]
表4每个航速下的推力系数和转矩系数
[0064]
航速(kn)推力系数转矩系数160.30770.0588180.26090.0516200.23010.0464
[0065]
第五步:根据s4所求的螺旋桨推力系数和转矩系数,求取螺旋桨推力和主机功率。所有航速下的螺旋桨推力和主机功率如下表5所示。
[0066]
表5每个航速下的螺旋桨推力和主机功率
[0067]
航速(kn)螺旋桨推力(kn)主机功率(kw)169701773218823155452072613987
[0068]
第六步:根据不同航速下的船体阻力(参见表6)和螺旋桨推力,绘制船体阻力曲线和螺旋桨推力曲线,如图4所示(图中横坐标为航速(kn),纵坐标为阻力和推力(kn),两个曲线交点为阻力和推力平衡的点),求其交点,得到交点对应的航速为17.02kn,该航速即为给定的螺旋桨转速和螺距比下的预报航速。
[0069]
表6船体阻力
[0070]
[0071][0072]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。