1.本实用新型涉及一种水下推进器,具体涉及一种融合矢量推进和叶片式吸盘的可分离式水下推进器。
背景技术:
2.我国早期的水坝建筑基本都在建国初期完成,而绝大部分的大坝坝体都是由混凝土组成,随着时间的推移,坝体在水下的部分由于水流的冲击和不断的侵蚀导致整个混凝土结构遭到很大地破坏,难以满足设计时相应的要求,因此水下维修坝体就变成了很重要的工作。
3.相比于人工下潜完成混凝土坝体修复工作,水下机器人在这方面的安全性更高,并且续航性更长。但是对于水下维修机器人来说,姿态的调节是一个非常重要的部分,尤其是在进行修复的过程中,对于机器人来说保持一个合适的工作角度非常重要。况且,一般的推进方式也会导致机器人结构过于复杂,进而导致机器人体积、质量都非常大。
4.目前针对于水下坝体维修的机器人基本上都是基于固定的螺旋桨和轮子的结合实现机器人在水中姿态和位置的调节,该方式效率较为低下并且会导致机器人的结构较为复杂。
5.而在矢量推进方面目前现有的基本都是应用六个以上固定螺旋桨的方式实现水下机器人整体各个自由度的实现,这样的方式直接导致机器人整体结构的复杂化,不论是质量和体积都很难做小,整体设计出来的机器人会非常的笨重。
技术实现要素:
6.为了解决技术背景中存在的问题,本实用新型提供了一种融合矢量推进和叶片式吸盘的可分离式水下推进器,来实现水下机器人的位姿调节和小型化。
7.本实用新型的技术方案如下:
8.本实用新型包括二维矢量推进结构,二维矢量推进结构包括水下灯光、螺旋桨、防水电机和防水电机架,水下机器人的四个角均安装有一个水下灯光,四个水下灯光主要用于为机器人的摄像头提供视野范围内的灯光。水下机器人前后两端的两侧均固定有一个防水电机架,每个防水电机架中放置一个防水电机,且防水电机的输出轴与各自的防水电机架的一端连接,每个防水电机架的另一端套装在一个螺旋桨的轴上,每个螺旋桨的尾端有一个螺旋桨控制线,螺旋桨控制线与控制仓连接。四个螺旋桨安装在同一个平面上,构成二维矢量推进。
9.水下机器人前端两侧的螺旋桨与水下机器人后端两侧的螺旋桨对称布置。使整体推动效率较高,可以实现机器人的多自由度行进。
10.水下机器人进行水下贴壁工作时,在二维矢量推进结构下部对中安装吸附模块,吸附模块和二维矢量推进结构根据工作需要可以安装在一起也可以拆卸,吸附模块和二维矢量推进结构安装在一起后能够支持水下机器人在水下平面进行贴壁行进。
11.所述的吸附模块包括叶片式吸盘、行进轮和供电模块,叶片式吸盘布置在吸附模块的中心,叶片式吸盘为水下机器人在贴壁行驶过程中提供吸力,吸附模块前后两端的两侧均安装有一个行进轮,行进轮实现水下机器人在水下平面上的行进,吸附模块的下端安装有供电模块,供电模块与行进轮电连接,为行进轮提供动力能源。
12.所述的吸附模块前端两侧的行进轮为主动轮,吸附模块后端两侧的行进轮为从动轮。
13.通过防水电机的转动控制防水电机架转动,进而控制螺旋桨的旋转方向以完成水下机器人姿态的调整和水下机器人运动方向的变化。通过螺旋桨控制线调节螺旋桨的转速大小,为水下机器人运动提供不同大小的推动力。
14.每个防水电机单独控制各自的螺旋桨,使各自的螺旋桨具有一个旋转自由度,使得螺旋桨在各个方向上为水下机器人提供推力,进而使得水下机器人向各个方向运动。由于每个防水电机单独控制每个螺旋桨,因此防水电机可以同时差动的方式配合四个螺旋桨实现机器人整体完整的六个自由度;水下机器人的上浮和下沉是利用防水电机控制各自的螺旋桨的旋转方向全部朝上实现。
15.四个防水电机均被固定在水下机器人底盘的平面上,使整体具有二维矢量,保证二维矢量推进结构的可靠性。水下机器人底盘的质量小于8kg,底盘的结构紧密且集成度较高,有利于实现水下机器人的小型化和轻型化。
16.二维矢量推进结构简单,可以用最少的螺旋桨可以实现水下机器人在水下具有多个自由度。
17.四个螺旋桨统一协调的情况下可以对水下机器人整体实现各个方向的推力,以保证机器人向各个方向的运动。四个螺旋桨相结合保证了机器人在水下具有六个自由度,并且可以实现原地转向的功能。
18.本实用新型的基于矢量推进的小型水下推进器可以通过对于防水电机的控制直接调节螺旋桨的角度,通过四个螺旋桨的不同角度完成机器人整体方向和姿态的调整,通过螺旋桨转速的调节实现机器人行进速度的控制。本实用新型通过四个螺旋桨之间的相互配合和调节保证了机器人整体可以具有完整的六个自由度。
19.本实用新型具有的有益效果是:
20.本实用新型便携灵活,能够满足不同需要以适应不同的场合,且本实用新型的推进器整体结构简单,用最少的螺旋桨可以实现整体多个自由度的实现,有利于实现水下机器人的小型化和轻型化,且本实用新型的整体推动效率较高可以实现机器人的多自由度行进。
附图说明
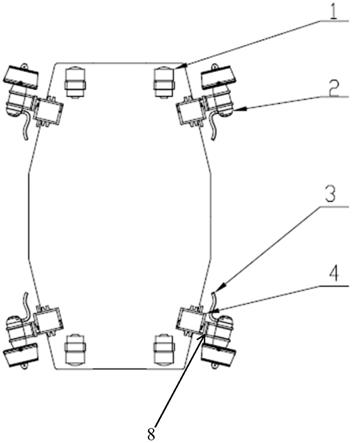
21.图1为本实用新型水下推进器的俯视示意图;
22.图2为本实用新型水下推进器的主视示意图;
23.图3为本实用新型水下推进器可拆卸底盘的底面示意图。
24.图中,1、水下灯光;2、螺旋桨;3、螺旋桨控制线;4、防水电机;5、叶片式吸盘;6、行进轮;7、供电模块、8防水电机架。
具体实施方式
25.下面结合附图和实施例对本实用新型作进一步的说明,但本实用新型的实施方式不限于此。
26.为了更清楚的说明本实用新型实施的技术方案,下面将对实施例的附图作简单的介绍。
27.如图1所示,本实用新型包括二维矢量推进结构,二维矢量推进结构包括水下灯光1、螺旋桨2、防水电机4和防水电机架8,水下机器人的四个角均安装有一个水下灯光1,四个水下灯光1主要用于为机器人的摄像头提供视野范围内的灯光。水下机器人前后两端的两侧均固定有一个防水电机架8,每个防水电机架8中放置一个防水电机4,且防水电机4的输出轴与各自的防水电机架8的一端连接,每个防水电机架8的另一端套装在一个螺旋桨2的轴上,每个螺旋桨2的尾端有一个螺旋桨控制线3,螺旋桨控制线3与控制仓连接。四个螺旋桨2安装在同一个平面上,构成二维矢量推进。
28.水下机器人前端两侧的螺旋桨2与水下机器人后端两侧的螺旋桨2对称布置,使整体推动效率较高,可以实现机器人的多自由度行进。
29.水下机器人进行水下贴壁工作时,在二维矢量推进结构下部对中安装吸附模块,吸附模块和二维矢量推进结构根据工作需要可以安装在一起也可以拆卸,吸附模块和二维矢量推进结构安装在一起后能够支持水下机器人在水下平面进行贴壁行进。
30.如图2和图3所示,吸附模块包括叶片式吸盘5、行进轮6和供电模块7,叶片式吸盘5布置在吸附模块的中心,叶片式吸盘5为水下机器人在贴壁行驶过程中提供吸力,吸附模块前后两端的两侧均安装有一个行进轮6,行进轮6实现水下机器人在水下平面上的行进,吸附模块的下端安装有供电模块7,供电模块7与行进轮6电连接,为行进轮6提供动力能源。吸附模块前端两侧的行进轮6为主动轮,吸附模块后端两侧的行进轮6为从动轮。
31.每个防水电机4单独控制各自的螺旋桨2,使各自的螺旋桨2具有一个旋转自由度,使得螺旋桨2在各个方向上为水下机器人提供推力,进而使得水下机器人向各个方向运动。由于每个防水电机4单独控制每个螺旋桨2,因此防水电机4可以同时差动的方式配合四个螺旋桨2实现机器人整体完整的六个自由度;水下机器人的上浮和下沉是利用防水电机4控制各自的螺旋桨2的旋转方向全部朝上实现,控制仓通过螺旋桨控制线3控制螺旋桨2的转速。
32.四个防水电机4均被固定在水下机器人底盘的平面上,使整体具有二维矢量,保证二维矢量推进结构的可靠性。水下机器人底盘的质量小于8kg,底盘的结构紧密且集成度较高,有利于实现水下机器人的小型化和轻型化。
33.二维矢量推进结构简单,可以用最少的螺旋桨可以实现水下机器人在水下具有多个自由度。
34.具体实施中,通过防水电机4的转动控制防水电机架8转动,进而控制螺旋桨2的旋转方向以完成水下机器人姿态的调整和水下机器人运动方向的变化。
35.通过螺旋桨控制线3调节螺旋桨2的转速大小,为水下机器人运动提供不同大小的推动力。
36.四个螺旋桨的安装位置与竖直平面成一定夹角,并且可以在水平提供机器人整体向前和向后的推力。四个螺旋桨2统一协调的情况下可以对水下机器人整体实现各个方向
的推力,以保证机器人向各个方向的运动。四个螺旋桨2相结合保证了机器人在水下具有六个自由度,并且可以实现原地转向的功能。由于每个电机和螺旋桨都是单独控制,因此可以同时差动的方式配合四个螺旋桨实现机器人整体完整的六个自由度。上浮和下沉则利用电机控制螺旋桨全部朝上即可。
37.如图1所示,假设螺旋桨2逆时针旋转时可以提供推力,顺时针旋转提供吸力,将螺旋桨旋转到如图1所示的位置,即水下机器人前端两侧的两个螺旋桨与水下机器人后端两侧的机器人对称布置,启动水下机器人前端两侧的防水电机4控制各自的防水电机架8转动,进而控制各自的螺旋桨2顺时针旋转给整体提供吸力,水下机器人后端两侧的防水电机4控制各自的防水电机架8转动,进而控制各自的螺旋桨2逆时针旋转给整体提供拉力,水下机器人前端两侧的两个螺旋桨提供吸力,水下机器人后端两侧的两个螺旋桨提供拉力,使得推进器整体向前运动。启动水下机器人前端两侧的防水电机4控制各自的防水电机架8转动,进而控制各自的螺旋桨2朝向的方向以逆时针旋转给整体提供拉力,水下机器人后端两侧的防水电机4控制各自的防水电机架8转动,进而控制各自的螺旋桨2朝向的方向顺时针旋转给整体提供吸力,水下机器人前端两侧的两个螺旋桨提供拉力,水下机器人后端两侧的两个螺旋桨提供吸力,使得推进器整体向后运动;防水电机4用于控制螺旋桨2的方向,控制仓通过螺旋桨控制线3控制螺旋桨2的转速。
38.推进器整体向其他方向运动时,只需通过防水电机调整螺旋桨方向或以差速、差动的方式实现。其中需要假设是因为螺旋桨选装方向所提供推力或拉力与螺旋桨具体结构有关。
39.本实用新型利用防水电机控制螺旋桨实现水下机器人整体移动和姿态调整,并结合叶片式吸盘实现推进器在水下平面的行进。水下机器人的矢量推进方式主要包括螺旋桨、防水电机、照明设施和底盘。吸附模块为可拆卸设计,在需要贴壁行驶的情况下可以安装,其上装有叶片式吸盘用于贴壁行驶过程中提供吸附力,周围安装有四个轮子实现在水下平面上的行进。矢量推进机构主要由四个防水电机分别控制四个螺旋桨组成,四个螺旋桨可以同时提供水平方向前后的驱动以及上浮和下潜的控制,也可以提供机器人整体水平方向左右两边的推力。本实用新型旨在利用最小的空间实现机器人的行进,并且在水下可以平稳的完成机器人姿态的调整以及各个方向的前进后退。