1.本实用新型涉及航道测量技术领域,尤其涉及一种小型智能多功能水面机器人航道多功能无人测量船。
背景技术:
2.长江因水流下切、冲淤明显,河床变化较大,为保障长江航道安全畅通,确保行轮航行安全,有关部门需经常开展航道扫测、航标连线测量和航道巡查,现目前,长江航道测量通常使用大型航标船携带测量器材或使用无人测量船开展测量。
3.技术缺点:1.大型航标船人员投入量大,航标船油耗高,成本投入较高,且因航标船船体较大,吃水较深,为保证航标船自身安全,不能到浅水域开展测量,测量范围有限;2.因长江上游水流流速快,流态紊乱,多浪涌,市面上的无人测量船,材质多为塑料,尺寸小,稳性差、动力小、续航能低、密封性差,在长江航道开展测量时,易翻沉进水,导致设备损坏,在遇大风或浪涌时,测量数据误差大,多为假水深数据,在流速较快、流态紊乱的水域,因动力小、续航能力低,无法大范围和长距离测量,且部分在部分急流险滩且无法航行(动力不足),基本无法适应长江航道复杂水域,只能开展湖泊等静态水域测量。
技术实现要素:
4.本实用新型提供一种小型智能多功能水面机器人航道多功能无人测量船,解决了上述提出的技术问题。
5.为解决上述技术问题,本实用新型提供的一种小型智能多功能水面机器人航道多功能无人测量船,包括测量船主体,所述测量船主体的顶部固定安装有流线型甲板,且测量船主体的外端上侧边缘处固定安装有防撞胶条,所述流线型甲板的上端左侧边缘处固定安装有消防水炮,且靠近消防水炮的位置处,位于流线型甲板的顶部铰接安装有密封盖,所述流线型甲板顶部,位于密封盖的右上方固定安装有外检测机构,所述外检测机构的右下方,位于流线型甲板顶部右侧边缘处对称安装有两个通信天线,所述测量船主体的尾端中部固定安装有推进器机构,且推进器机构的外方设置有防撞架,所述防撞架固定安装在尾端将推进器机构围绕防护,所述测量船主体的顶部外侧边缘固定安装有多个吊环。
6.优选的,所述密封盖设置有两个,两个所述密封盖上安装有透气呼吸阀件,且测量船主体内部舱室贯通,所述测量船主体的底部安装有声呐传感器,且与推进器机构相互配合。
7.优选的,所述测量船主体包括船体、舰尖舱、燃油舱、设备舱和艏尖舱,所述船体内部从船尾到船头共分成舰尖舱、燃油舱、设备舱和艏尖舱。
8.优选的,所述燃油舱储存大量燃油为推进器机构提供能源,所述设备舱中安装有安装有单波速、多波速、流速剖面仪、测深仪、水质检测仪、流速流向仪、蓄电池和plc系统控制端等设备,且蓄电池为测量船主体上需通电的设备提供电能。
9.优选的,所述船体的外端内部均匀安装有多个毫米波雷达,所述舰尖舱与舰尖舱
分别与两个密封盖相连接。
10.优选的,所述外检测机构包括设备架、侧摄像头、顶部安装架、外放音响、激光雷达、ais、gnss、监控摄像头和航行灯,所述设备架固定安装在流线型甲板上,且设备架的中部分别安装有监控摄像头、gnss和ais,所述设备架的两个侧端面上对称固定安装有两个侧摄像头,所述设备架的顶部中心处固定安装有顶部安装架,且顶部安装架的底部两侧边缘处对称安装有航行灯,所述顶部安装架底部和顶部中心处分别固定安装有外放音响与激光雷达。
11.优选的,所述推进器机构包括推进器主体、固定连接轴和电动缸,所述推进器主体通过轴连接的固定连接轴固定安装在测量船主体的尾部,且推进器主体下侧与电动缸一端固定连接,所述电动缸的另一端固定安装在测量船主体的尾部。
12.优选的,所述电动缸倾斜安装在测量船主体的尾部与电动缸固定连接,且电动缸驱动伸出带动推进器主体翻转向上。
13.优选的,所述测量船主体上的通电设备通过plc系统控制端控制或通过两个通信天线远程控制。
14.优选的,所述测量船主体上通过安装的多个毫米波雷达、两个侧摄像头、激光雷达和监控摄像头组成远近碰撞检测和视觉碰撞检测系统。
15.与相关技术相比较,本实用新型提供的一种小型智能多功能水面机器人航道多功能无人测量船具有如下有益效果:
16.本实用新型提供,本多功能无人测量船,通过燃油舱输送燃油到推进器主体使其驱动工作,提高船体续航能力强,可满足大范围长距离测量任务,满足24小时全天候无人航行,解决了测量船续航能力不足的问题。
17.本实用新型提供,通过安装gnss和ais北斗定位系统、全天候监控摄像头、通信天线等,满足船舶定位和测量的要求,稳性好,动力强,满足在大流速、流态紊乱、浅滩乱石多等复杂水域测量,测量数据准确。
18.本实用新型提供,本测量船使用所需人员、燃料、设备等成本投入低,经济效益好。
19.本实用新型提供,船体顶部安装有流线型甲板,增加底部设备舱容积,船体设备空间大,可安装安装有单波速、多波速、流速剖面仪、测深仪、水质检测仪、流速流向仪、蓄电池和plc系统控制端等多个设备,功能强大。
20.本实用新型提供,船体采用铝合金材质,不锈蚀、重量轻,多舱室隔离,密封性、抗沉性强。
21.本实用新型提供,作系统稳定,可近远程控制和船舶自主航行,断面跑线测量更加稳定。
22.本实用新型提供,船体四周安装了毫米波雷达,用以近距离避碰,设备架顶部安装激光雷达,实现远程避碰的目的,设备架两侧分别安装了侧摄像头,用以满足两侧视觉避碰的需要,满足近远程避碰,满足超视距作业。
23.本实用新型提供,搭载了高扬尘大流量的消防水炮,可满足日常航标的清洗和快速应急消防救援。
24.本实用新型提供,通过安装外放音响设备、航行灯和全天候监控摄像头,可远程喊话和录像,数据实时传送,满足航行巡查巡视的功能。
25.本实用新型提供,通过plc系统控制端控制或通过两个通信天线远程控制,使其操作系统稳定,可近远程控制和船舶自主航行,断面跑线测量更加稳定。
附图说明
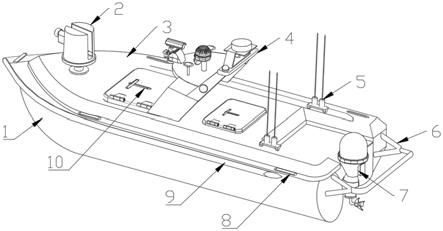
26.图1为本实用新型整体示意图;
27.图2为本实用新型测量船主体侧视剖面示意图;
28.图3为本实用新型外检测机构示意图;
29.图4为本实用新型推进器机构示意图。
30.图中标号:1、测量船主体,2、消防水炮,3、流线型甲板,4、外检测机构,5、通信天线,6、防撞架,7、推进器机构,8、吊环,9、防撞胶条,10、密封盖,11、船体,12、舰尖舱,13、燃油舱,14、设备舱,15、艏尖舱,41、设备架,42、侧摄像头,43、顶部安装架,44、外放音响,45、激光雷达,46、ais,47、gnss,48、监控摄像头,49、航行灯,71、推进器主体,72、固定连接轴,73、电动缸。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.实施例一,由图1
‑
4给出,本实用新型包括测量船主体1的顶部固定安装有流线型甲板3,且测量船主体1的外端上侧边缘处固定安装有防撞胶条9,流线型甲板3的上端左侧边缘处固定安装有消防水炮2,且靠近消防水炮2的位置处,位于流线型甲板3的顶部铰接安装有密封盖10,流线型甲板3顶部,位于密封盖10的右上方固定安装有外检测机构4,外检测机构4的右下方,位于流线型甲板3顶部右侧边缘处对称安装有两个通信天线5,测量船主体1的尾端中部固定安装有推进器机构7,且推进器机构7的外方设置有防撞架6,防撞架6固定安装在尾端将推进器机构7围绕防护,测量船主体1的顶部外侧边缘固定安装有多个吊环8;测量船主体1包括船体11、舰尖舱12、燃油舱13、设备舱14和艏尖舱15,船体11内部从船尾到船头共分成舰尖舱12、燃油舱13、设备舱14和艏尖舱15;外检测机构4包括设备架41、侧摄像头42、顶部安装架43、外放音响44、激光雷达45、ais46、gnss47、监控摄像头48和航行灯49,设备架41固定安装在流线型甲板3上,且设备架41的中部分别安装有监控摄像头48、gnss47和ais46,设备架41的两个侧端面上对称固定安装有两个侧摄像头42,设备架41的顶部中心处固定安装有顶部安装架43,且顶部安装架43的底部两侧边缘处对称安装有航行灯49,顶部安装架(43)底部和顶部中心处分别固定安装有外放音响44与激光雷达45。
33.实施例二,在实施例一的基础上,推进器机构7包括推进器主体71、固定连接轴72和电动缸73,推进器主体71通过轴连接的固定连接轴72固定安装在测量船主体1的尾部,且推进器主体71下侧与电动缸73一端固定连接,电动缸73的另一端固定安装在测量船主体1的尾部。
34.本实施例中:采用型号为雅马哈30马力二冲程的推进器主体71,型号为dh65的电动缸73、型号为zdms0.8/10s
‑
ga的消防水炮2,型号为velodyne vls
‑
128的激光雷达45,型
号为dya703的ais46,型号为car
‑
n28型的毫米波雷达,型号为flow quest1000的多普勒流速仪,型号为南方银河1的gnss47,型号为lnf60x12.5yp
‑
z的监控摄像头48,型号为ds
‑
2cd7187ewd
‑
iz的侧摄像头42,型号为hp
‑
15t的外放音响44,型号为xl
‑
ls
‑
h的航行灯49。
35.工作原理:
36.船体11(铝合金材质)包括舰尖舱12、燃油舱13、设备舱14和艏尖舱15四个部分,其中艏尖舱15与艉尖舱起密封舱作用,提高船舶抗沉性,艏尖舱15与艉尖舱通过密封盖10和透气呼吸阀件,在保证水密的情况下,使舱室可呼吸,排出因温度变化舱室产生的气体,避免舱室受气压变形且艉尖舱部高度低于前三个舱,设备舱14安装有测深仪、水质检测仪、流速流向仪、蓄电池和plc系统控制端,中后部为燃油舱13,为推进器机构7提高能源,工作时,plc系统控制端控制测量船主体1进行检测工作,通过燃油舱13输送燃油到推进器主体71使其驱动工作,带动船体11在江面上移动,使测深仪、水质检测仪和流速流向仪对江面进行检测,推进器机构7通过防撞架6保护,防撞受到碰撞受损而船体11底部四周安装了防撞胶条9,防止船体11外端移动过程中碰撞受损;
37.船体11顶部安装有流线型甲板3,增加底部设备舱14容积的同时,增强了船舶的层次感,提高了船舶的整体性和美感,流线型甲板3前部安装了消防水炮2,用于航标清洗和应急消防救援,消防水炮2通过螺栓安装,可进行拆卸使用,船体11四周安装了毫米波雷达,用以近距离避碰,设备架41顶部安装激光雷达45,实现远程避碰的目的,设备架41两侧分别安装了侧摄像头42,用以满足两侧视觉避碰的需要,且设备架41上还安装了外放音响44设备和航行灯49,用于远程广播喊话和夜间航行,中部安装gnss47和ais46北斗定位系统、全天候监控摄像头48和通信天线5等,满足船舶定位和测量的要求,且监控摄像头48带红外和防水功能。
38.船体11在行驶过程中,收纳传感器检测到水底有障碍物或不使用时,将其信号发送到plc系统控制端,使其控制电动缸73开始伸出,电动缸73带动推进器主体71,使推进器主体71通过固定连接轴72转动向上,与艉尖舱舱面平行,在不需要与船体11分离的情况下自动翻转至艏尖舱15舱面,无需进行拆卸。
39.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
40.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。