1.本实用新型涉及一种水下机器人机舱,具体涉及一种基于斜面密封的智能水下机器人机舱。
背景技术:
2.目前,在水下机器人领域比较先进的主要国家是欧美、日本等一些海洋强国。这些国家从上世纪60年代开始成立研究机构致力于相关技术研究和产品开发,经过多年的研究发展,积累了大量的技术,形成了完整的水下机器人产业。在水下机器人运动控制、各种类型水下机器人开发等方面都形成了巨大的优势,在国际上处于先进水平。我国的水下机器人研究起步比较晚,但是经过十几年的努力也取得了一定成就,自行研发的大中型遥控无人潜水器(rov)已经在海洋资源勘测与开发、水下搜救等方面发挥了重要的作用。但是在水下智能机器人开发方面我国还处在起步阶段,远远落后于国际先进水平。因此开发水下常驻、能量利用效率高、结构简单、可靠性高的水下智能机器人十分必要,并且在结构设计及优化、智能无人控制系统等方面都需要长久不懈的努力。
3.此外,密封舱是水下机器人的关键部件之一,密封舱的耐压、密封性能直接决定了水下机器人的下潜深度及自身的耐久性、可靠性。因此水下机器人机舱的设计是水下机器人整体设计中很重要的一部分,具备较高的技术含量,一定程度上决定了水下机器人的体积、性能、可装配性等。
4.机舱本身的密封性能及可靠性是评价该设计的重要技术指标,目前常用的设计方案为使用密封圈进行密封,或者组合使用多个密封圈进行密封,提高防水性能。但是该类设计对密封圈的配合处公差要求较高,提高了制造成本,密封圈会随着时间的推移而逐渐老化,需要定期进行检查及更换,具体如下:
5.1.该类设计结构复杂,制造成本高;
6.2.使用密封圈及密封圈的组合进行密封需要定期进行检查及更换,维护费用高,不适合水下常驻的机器人及设备;
7.3.密封圈配合处对配合公差要求较高,提高了机舱本身的制造成本;
8.4.机舱顶部与底端为平面结构,造成了耐压性能不足,使其成为了整个设计的薄弱点。
9.因此,需要设计一种能够解决上述问题的水下机器人机舱。
技术实现要素:
10.本实用新型是为了解决上述问题而进行的,目的在于提供一种基于斜面密封的智能水下机器人机舱。
11.本实用新型提供了一种基于斜面密封的智能水下机器人机舱,具有这样的特征,包括:舱体以及与舱体通过螺纹连接的可拆卸舱盖,其中,可拆卸舱盖的底端具有与竖直方向呈45度角的第一斜面,且可拆卸舱盖上具有舱盖螺纹,舱体顶端的开口的内周设置有与
舱盖螺纹相互配合连接以使可拆卸舱盖与舱体连接在一起的舱体螺纹,舱体螺纹的下周设置有与第一斜面相互配合的第二斜面,从而使得舱体与可拆卸舱盖之间通过螺纹连接后,第一斜面的端部与第二斜面的端部相互贴合,进而实现密封。
12.在本实用新型提供的基于斜面密封的智能水下机器人机舱中,还具有这样的特征:其中,舱体两端均为弧面。
13.在本实用新型提供的基于斜面密封的智能水下机器人机舱中,还具有这样的特征:其中,可拆卸舱盖上开设有4个用于装配的盲孔。
14.在本实用新型提供的基于斜面密封的智能水下机器人机舱中,还具有这样的特征:其中,可拆卸舱盖上开设有1个或多个用于安装穿线螺栓的螺纹孔,并通过穿线螺栓将舱体内的缆线穿出。
15.在本实用新型提供的基于斜面密封的智能水下机器人机舱中,还具有这样的特征:其中,螺纹孔为m10的螺纹孔。
16.实用新型的作用与效果
17.根据本实施例所涉及的基于斜面密封的智能水下机器人机舱,由于可拆卸舱盖上具有第一斜面,同时舱体内部设置有与第一斜面配合的第二斜面,从而能够使得舱体与可拆卸舱盖之间通过螺纹连接后实现密封,且密封持久可靠,此外,由于可拆卸舱盖可以打开,所以便于调试及检修时打开机舱;由于机舱两端均为弧面,所以增加了整体的耐压性能;由于可拆卸舱盖上开设有4个用于装配的盲孔,所以能够方便地进行拆装,并使得整个机舱结构紧凑,进而充分利用了所有空间;由于可拆卸舱盖上设置有用于安装穿线螺栓螺纹孔,所以能够通过穿线螺栓将机舱内的缆线穿出,而后再配合使用密封胶进行密封,使其密封效果好,方便拆装。
18.因此,本实用新型的基于斜面密封的智能水下机器人机舱,整个机舱轻巧、耐压、空间利用合理,并且结构简单,密封性好,密封时间长久,适用于水下常驻设备,降低了定期检修更换密封圈的费用。
附图说明
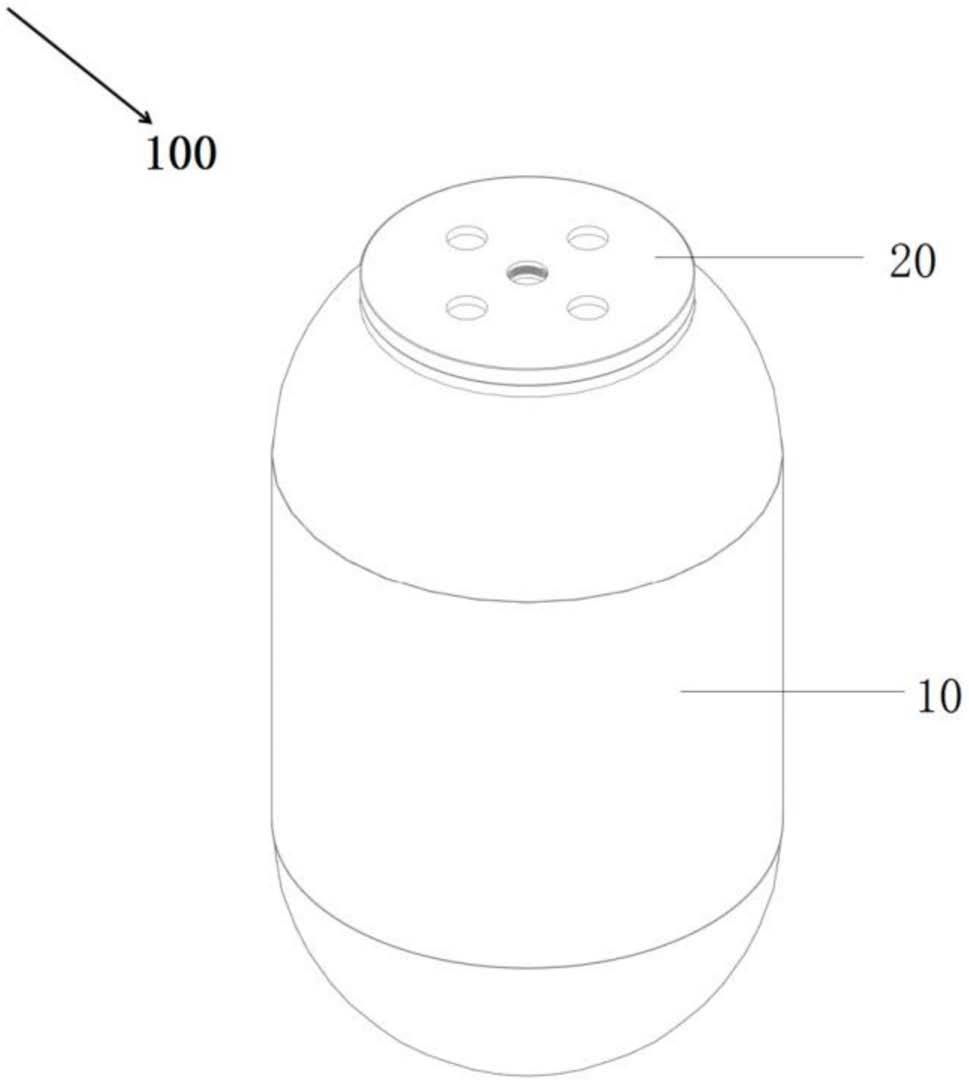
19.图1是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的整体示意图;
20.图2是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的可拆卸舱盖的示意图;
21.图3是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的舱体的示意图;
22.图4是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的舱体与可拆卸舱盖装配后的斜面接合示意简图。
具体实施方式
23.为了使本实用新型实现的技术手段与功效易于明白了解,以下结合实施例及附图对本实用新型作具体阐述。
24.实施例:
25.图1是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的整体示意图,图2是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的可拆卸舱盖的示意图,图3是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的舱体的示意图,图4是本实用新型的实施例中基于斜面密封的智能水下机器人机舱的舱体与可拆卸舱盖装配后的斜面接合示意简图。
26.如图1
‑
图4所示,本实施例提供了一种基于斜面密封的智能水下机器人机舱100包括:舱体10以及设置于舱体10一端并通过螺纹连接的可拆卸舱盖20,该可拆卸舱盖20可以打开卸下,便于调试检修。
27.如图2所示,可拆卸舱盖20的底端具有与竖直方向呈45度角的第一斜面21,且可拆卸舱盖20上具有舱盖螺纹,并且可拆卸舱盖20上开设有4个用于装配的盲孔22,同时,可拆卸舱盖20上还开设有1个或多个用于安装穿线螺栓的螺纹孔23,使其能够通过穿线螺栓将舱体20内的缆线穿出,然后再配合使用密封胶,从而完成穿线和密封。
28.进一步地,螺纹孔23一般为m10的螺纹孔,其可以根据具体情况进行调整。
29.如图3所示,舱体10顶端的开口的内周设置有与舱盖螺纹相互配合连接以使可拆卸舱盖20与舱体10连接在一起的舱体螺纹,舱体螺纹的下周设置有与第一斜面21相互配合的第二斜面11,待舱体10与可拆卸舱盖20之间的螺纹相互连接拧紧后,第一斜面21的端部与第二斜面11的端部相互贴合,从而完成如图4所示的接合,a处为斜面接合处,进而使得舱体10与可拆卸舱盖20之间通过螺纹连接后实现密封,并且该种形式的密封,密封性能可靠、时间持久。
30.进一步地,第一斜面21与第二斜面11均为具有一定粗糙度的斜面,从而能够增强整体的密封性。
31.如图3所示,舱体10两端均为弧面,其在制造时使用焊接工艺,使其在保证耐压性能的前提下,极大的降低了成本。
32.进一步地,当需要改变机舱的耐压性能时,只需改变舱体10两端的弧面范围即可,具体地:当需要增加机舱的耐压性能时,只需增加舱体10两端的弧面范围即可。
33.实施例的作用与效果
34.根据本实施例所涉及的基于斜面密封的智能水下机器人机舱,由于可拆卸舱盖上具有第一斜面,同时舱体内部设置有与第一斜面配合的第二斜面,从而能够使得舱体与可拆卸舱盖之间通过螺纹连接后实现密封,且密封持久可靠,此外,由于可拆卸舱盖可以打开,所以便于调试及检修时打开机舱。
35.根据本实施例所涉及的基于斜面密封的智能水下机器人机舱,由于机舱两端均为弧面,所以增加了整体的耐压性能。
36.根据本实施例所涉及的基于斜面密封的智能水下机器人机舱,由于可拆卸舱盖上开设有4个用于装配工装的盲孔,所以能够方便地进行拆装,并使得整个机舱结构紧凑,充分利用了所有空间。
37.根据本实施例所涉及的基于斜面密封的智能水下机器人机舱,由于可拆卸舱盖上设置有用于安装穿线螺栓螺纹孔,所以能够通过穿线螺栓将机舱内的缆线穿出,而后再配合使用密封胶进行密封,使其密封效果好,方便拆装。
38.因此,本实施例的基于斜面密封的智能水下机器人机舱,整个机舱轻巧、耐压、空
间利用合理,并且结构简单,密封性好,密封时间长久,适用于水下常驻设备,降低了定期检修更换密封圈的费用。
39.上述实施方式为本实用新型的优选案例,并不用来限制本实用新型的保护范围。
40.例如,上述实施例中,舱体的一端为可以打开的可拆卸舱盖,所以便于调试及检修时打开机舱,但在本实用新型中,舱体的两端都设计为可以打开的可拆卸舱盖,同样可以便于调试及检修时打开机舱。
41.进一步地,上述实施例中,可拆卸舱盖通过螺纹与舱体进行连接,达到密封的效果,但在本实用新型中,可以在可拆卸舱盖上打通孔,舱体上加工螺纹孔,使用螺栓连接压紧可拆卸舱盖,同样可以达到密封的效果。
42.进一步地,上述实施例中,利用可拆卸舱盖与舱体的斜面配合进行密封,从而使得密封持久可靠,但在本实用新型中,可以将上述的斜面密封作为主要的密封方式,密封圈密封方式作为辅助方法,同样能够达到密封持久可靠的效果。