1.本实用新型属于水下机器人领域,具体地说是一种水下作业自主航行机械臂。
背景技术:
2.水下机器人按用途可以分为观测型和作业型,配备水下操作机械臂的作业型水下机器人(underwater vehicle—manipulator systems,uvms)能够代替人完成复杂的水下作业任务,具有广阔的研究前景和工程意义。水下机械臂是作业型水下机器人不可缺少的工具,广泛用于水下作业型机器人的水下采样、抓取、操作等任务,是提高水下机器人作业效率的重要组成部分,在海洋科学考察、海洋工程等领域得到广泛应用。目前,作业型机器人的结构形式朝着多体结构可分离化发展,主要是以本体潜器为核心,很难进行精细化作业。
技术实现要素:
3.本实用新型的目的在于提供一种水下作业自主航行机械臂。该机械臂具备水下航行和精细作业能力,可实现六自由度推进,重点是实现作业模式由以潜器为核心向以机械臂为核心的转变。
4.本实用新型的目的是通过以下技术方案来实现的:
5.本实用新型包括运动推进模块及对称设置于该运动推进模块两侧的水下中性机械臂模块,其中运动推进模块包括推进模块浮力材、机械臂支架及分别位于该推进模块浮力材内部的主体框架、推进器和电子舱,所述主体框架安装于推进模块浮力材的内部,该推进模块浮力材上开设有推进器流道,所述主体框架内部设有电子舱;所述推进模块浮力材内设有三组推进器,所述运动推进模块通过三组推进器具有六自由度;所述主体框架相对的两侧对称设有机械臂支架,每侧所述机械臂支架的一端固接于主体框架上,另一端由所述推进模块浮力材穿出;所述水下中性机械臂模块包括水下机械臂及机械臂模块浮力材,该水下机械臂安装于所述机械臂支架的另一端,所述水下机械臂外侧包裹有机械臂模块浮力材;所述推进器及水下机械臂分别与电子舱内的控制板连接。
6.其中:所述主体框架为长方体状,其上下相对的两面对称设有一组所述推进器,前后相对的两面对称设有一组所述推进器,左右相对的两面对称设有机械臂支架,两侧所述机械臂支架上对称设有一组所述推进器。
7.每组两个所述推进器的轴向中心线相平行,并与另外两组所述推进器的轴向中心线垂直但不相交。
8.所述主体框架上分别安装有水下相机及水下照明灯,该水下相机与水下照明灯均位于所述推进模块浮力材的内部,并分别与所述电子舱内的控制板相连。
9.每个所述水下机械臂上均安装有双目相机,该双目相机与所述电子舱内的控制板相连。
10.所述主体框架上安装有压力补偿器,该压力补偿器与所述电子舱内的控制板相
连,所述压力补偿器分别通过液压油管与两侧所述水下机械臂相连,对两侧所述水下机械臂进行压力补偿。
11.本实用新型的优点与积极效果为:
12.1.本实用新型实现作业模式由以潜器为核心向以机械臂为核心的转变,作业时可单手作业,另一只作为锚定手,也可双手协同作业;本实用新型能根据实际作业需求进行多形式组合,也可组合成多个作业系统开展协同作业,完成水下精细作业任务。
13.2.本实用新型采用模块化、可重构思想设计,便于更换模块。
14.3.本实用新型可与rov(遥控无人潜水器)形成子母系统,形成优势互补,rov负责完成大负载任务,移动机械臂协助开展精细作业。
15.4.本实用新型可实现六自由度运动。
附图说明
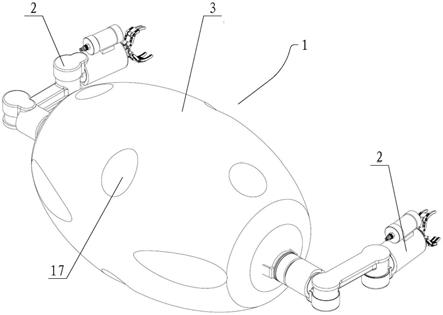
16.图1为本实用新型的整体结构示意图;
17.图2为图1中拿掉浮力材后的结构示意图;
18.图3为本实用新型运动推进模块的内部结构示意图;
19.其中:1为运动推进模块,2为水下中性机械臂模块,3为推进模块浮力材,4为机械臂支架,5为推进器,6为推进器支架,7为主体框架,8为水下相机,9为水下相机支架,10为电子舱,11为水下照明灯,12为水下照明灯支架,13为压力补偿器,14为水下机械臂,15为机械臂模块浮力材,16为双目相机,17为推进器流道。
具体实施方式
20.下面结合附图对本实用新型作进一步详述。
21.如图1~3所示,本实用新型包括运动推进模块1及对称设置于该运动推进模块1两侧的水下中性机械臂模块2,其中运动推进模块1包括推进模块浮力材3、机械臂支架4及分别位于该推进模块浮力材3内部的主体框架7、推进器5、水下相机8、水下照明灯11和电子舱10,主体框架7安装于推进模块浮力材3的内部,该推进模块浮力材3上开设有多个作为推进器流道17的通孔,用于海水流动;主体框架7内部设有电子舱10,电子舱10内设有控制板及与控制板相连的供电电池,本实施例的控制板为现有技术,在此不再赘述。推进模块浮力材3内设有三组推进器5,运动推进模块1通过三组推进器5具有六自由度(即升降自由度、前后推进自由度、左右推进自由度、绕升降方向的转动自由度、绕前后方向的转动自由度及绕左右方向的转动自由度,也就是三维坐标系统的沿x轴、y轴、z轴分别推进的自由度以及沿x轴、y轴、z轴分别转动的自由度);主体框架7相对的两侧对称设有机械臂支架4,每侧机械臂支架4的一端固接于主体框架7上,另一端由推进模块浮力材3穿出。
22.本实施例的主体框架7为长方体状,其上下相对的两面对称设有一组推进器5,前后相对的两面对称设有一组推进器5,左右相对的两面对称设有机械臂支架4,两侧机械臂支架4上对称设有一组推进器5。推进器5通过推进器支架6安装在主体框架7或机械臂支架4上。每组两个推进器5的轴向中心线相平行,并与另外两组推进器5的轴向中心线空间上垂直但不相交。各推进器5分别与电子舱10内的控制板连接。
23.本实施例的主体框架7上分别安装有水下相机8及水下照明灯11,该水下相机8通
过水下相机支架9固定在主体框架7上,水下照明灯11通过水下照明灯支架12固定在主体框架7上;水下相机8与水下照明灯11均位于推进模块浮力材3的内部,并分别与电子舱10内的控制板相连。
24.本实施例的水下中性机械臂模块2包括水下机械臂14、机械臂模块浮力材15及双目相机16,该水下机械臂14安装于机械臂支架4的另一端,水下机械臂14外侧包裹有机械臂模块浮力材15,实现水下机械臂14中性浮力而减少水下中性机械臂模块2工作时对运动推进模块1的干扰;每个水下机械臂14上均安装有双目相机16,该双目相机16与电子舱10内的控制板相连,实现水下作业功能。
25.本实施例的主体框架7上还安装有压力补偿器13,该压力补偿器13与电子舱10内的控制板相连,压力补偿器13分别通过液压油管与两侧水下机械臂14相连,对两侧水下机械臂14进行压力补偿。
26.本实用新型的推进模块浮力材3及机械臂模块浮力材15为市购产品,购置于海洋化工研究院有限公司的固体浮力材料,型号为sbm
‑
020h。
27.本实用新型的水下相机8及双目相机16均为市购产品,购置于威海至帆海洋装备科技有限公司,型号为c
‑
101。
28.本实用新型的压力补偿器为市购产品,购置于德国力士乐公司。
29.本实用新型的工作原理为:
30.工作时运动推进模块1负责移动,水下中性机械臂模块2负责作业。电子舱10内的控制板分别控制推进器5和水下机械臂14。作业时可以两侧水下机械臂14协同作业,也可以一个水下机械臂14作为锚定手、另一个水下机械臂14单手作业。水下相机8及双目相机16的视频有线传输给电子舱10内的控制板,控制板再通过电缆与水下机器人相连。同时,整个自主航行机械臂也可以协同大型作业机器人完成作业。根据实际作业需求进行多形式组合,也可组合成多个作业系统开展协同作业,完成水下精细作业任务。