1.本实用新型涉及机器人技术领域,具体涉及一种模块化编程机器人。
背景技术:
2.编程机器人是以激发学生学习兴趣,提高学生动手能力、创新能力,培养学生综合能力为目标的机器人成品、套装或散件。可编程机器人能够将一些可重复使用的步骤排列组合,使完成预定的序列程序的机器人拥有不同的形态和功能。使用者结合可编程机器人来学习编程已经成为一种时尚且便捷的方式。
3.现有技术中积木式编程机器人虽然引入了动手搭建的过程,但是仍然需要借助电子设备或者程序搭建的中间状态,因此对于初学者而言可编程机器人可能由于具有过于复杂的结构和部件而不利于学习编程思路,反而妨碍快速掌握基本编程技巧和结构分析的能力,容易迷失在繁琐的程序分析当中,与机器人的直接接触较少,缺少有效直接的肢体互动体验,从而导致交互方式较为单一,编程思想比较抽象,不适合用于教学且提高使用者对机器人系统及其动作的理解。因此对于提升使用者理解程度且有助于编程教育,需要一种操作方便模块化编程机器人,实现积木式编程机器人的构建能够让使用者充分参与且提升互动体验。
技术实现要素:
4.因此,本实用新型要解决的技术问题在于克服现有技术中积木构建参与度不高且编程思想抽象的缺陷,从而提供一种模块化编程机器人。
5.本实用新型的上述技术目的是通过以下技术方案得以实现的:
6.一种模块化编程机器人,包括多种类型拼接的多个积木块,还包括:
7.控制系统,所述控制系统包括中央处理器和无线传输模块,所述中央处理器接受并处理无线传输模块输送的数据,所述控制系统连接有显示部,所述显示部显示有与中央处理器和无线传输模块的连接状态;
8.输出类积木,所述输出类积木设有多个,所述输出类积木包括马达输出、光输出和声音输出,所述输出类积木由控制系统控制进行动作;
9.传感类积木,所述传感类积木设有多个,所述传感类积木包括红外感应模块、声音感应模块和光线感应模块,所述传感类积木与输出类积木信号连接,所述传感类积木还与控制系统通信连接;
10.电源积木,所述电源积木为充电座或电池中的一种,所述电源积木为控制系统、输出类积木、传感类积木和遥控/编程积木供电,所述电源积木上还设有电源开关,所述电源开关与无线传输模块连接;
11.遥控/编程积木,所述遥控/编程积木包括遥控装置和多个编程模块,所述遥控/编程积木与控制系统通信连接。
12.通过采用上述技术方案,克服现有技术中与机器人直接接触少的缺陷,通过不同
功能积木块的组建堆积,增加有效直接的肢体互动体验,提升使用者对机器人系统的理解及机械动作的理解,提高现有积木块的实用性及运用程度。
13.进一步的,所述遥控装置与无线传输模块通信连接,所述无线传输模块采用蓝牙传输,所述显示部上还显示有电源积木的电力状态和传感类积木的工作状态。
14.通过采用上述技术方案,无线传输模块上与遥控装置通信连接,且通过无线传输模块的蓝牙传输进行相连接,让使用者进行控制遥控装置进而进行控制机器人,最终让其输出类马达根据用户需求进行相关的操作,显示部显示积木块各种工作状态,确保连接稳定和工作正常。
15.进一步的,所述中央处理器与遥控装置通过心跳信号的交互进行工作状态的相互检查,所述中央处理器与传感类积木通过握手信号的交互进行工作状态的相互检查。
16.通过采用上述技术方案,确保中央处理器与遥控装置间通讯链路没有断开,保证之后的操作能够顺利进行,通过中央处理器与传感类积木的握手信号的交互,确保中央处理器能有充足时间进行数据处理,减少数据溢出而造成的数据丢失,从而保证积木块运动的连贯性和平稳性。
17.进一步的,所述遥控装置上设有开关按钮、前进按钮、左转按钮、右转按钮、后退按钮、重复步骤按钮、发送按钮,和/或声音控制按钮。
18.通过采用上述技术方案,在遥控装置上设置多个按钮,从而通过按钮实现控制积木块运动的目的,进而实现控制机器人的目的,遥控装置使用方便且便于操作,按钮简洁也便于区分。
19.进一步的,所述编程模块包括多个子程序,子程序为循环程序、进程程序、定时程序和条件判断中的一种或多种。
20.通过采用上述技术方案,编程模块内设置子程序提升机器人智能化程度,可供选择的子程序也减少编程时的抽象感,能够直观让使用者操作。
21.进一步的,每个所述积木块上均设有阴刻连接部和阳刻连接部,所述阴刻连接部和阳刻连接部对应设置,所述积木块内还开设有容纳腔。
22.通过采用上述技术方案,阴刻连接部和阳刻连接部相互配合卡接实现积木块的拼接搭建,在积木块内设有容纳腔便于其他功能模块零部件的放入,也便于后续的使用操作。
23.进一步的,所述积木块为柱状、矩形体或不规则形状,所述控制系统、输出类积木、传感类积木、电源积木和遥控/编程积木上均设有数据串口。
24.通过采用上述技术方案,积木块形状多变便于搭建不同形状机器人,通过不同积木块上的数据串口相连,从而实现积木块编程机器人的指令性运动。
25.进一步的,所述中央处理器内存储有各积木块的正常工作参数和/或工作寿命信息,并根据各积木块的正常工作参数和/或工作寿命信息判断其是否需要更换或维修,若是,则进行本地和/或远程警示。
26.通过采用上述技术方案,在中央处理器内存储各积木块的正常工作参数和/或工作寿命信息,实现了系统的预判性,实现了对各积木工作状态的预警功能,提前提醒使用者更换或维修,防止故障发生,提高使用效率并保证安全性。
27.综上所述,本实用新型技术方案,具有如下优点:
28.1.本实用新型提供的模块化编程机器人,通过不同功能积木块的组建堆积,增加
有效直接的肢体互动体验,提升使用者对机器人系统的理解及机械动作的理解,提高现有积木块的实用性及运用程度。
29.2.本实用新型提供的模块化编程机器人,编程模块能够通过调用子程序提升机器人智能化程度,同时可供选择的子程序也减少编程时的抽象感,能够直观让使用者操作。
30.3.本实用新型提供的模块化编程机器人,增加心跳信号和握手信号的交互,确保中央处理器与遥控装置间通讯链路没有断开,确保中央处理器能有充足时间进行数据处理,从而保证积木块运动的连贯性和平稳性。
31.4.本实用新型提供的模块化编程机器人,在中央处理器内存储各积木块的正常工作参数和/或工作寿命信息,实现了对各积木工作状态的预警功能,提前提醒使用者更换或维修,防止故障发生,提高使用效率并保证安全性。
附图说明
32.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
33.图1为本实用新型的一种实施方式中提供的一种模块化编程机器人的整体结构示意图;
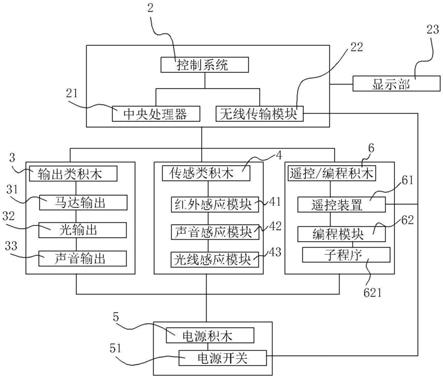
34.图2为本实用新型的一种实施方式中提供的一种模块化编程机器人的结构框图;
35.图3为本实用新型一种实施方式中提供的遥控装置的结构示意图。
36.附图标记说明:
37.1、积木块;11、阴刻连接部;12、阳刻连接部;13、容纳腔;14、数据串口;2、控制系统;21、中央处理器;22、无线传输模块;23、显示部;3、输出类积木;31、马达输出;32、光输出;33、声音输出;4、传感类积木;41、红外感应模块;42、声音感应模块;43、光线感应模块;5、电源积木;51、电源开关;6、遥控/编程积木;61、遥控装置;611、开关按钮;612、前进按钮;613、左转按钮;614、右转按钮;615、后退按钮;616、重复步骤按钮;617、发送按钮;618、声音控制按钮;62、编程模块;621、子程序。
具体实施方式
38.以下结合附图和实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
39.一种模块化编程机器人,如图1所示,由多个积木块1拼接组成机器人,积木块1为柱状、矩形体或不规则形状,积木块1上设有阴刻连接部11和阳刻连接部12,阴刻连接部11和阳刻连接部12对应设置,积木块1内还开设有容纳腔13,积木块1一侧还设有数据串口14,阴刻连接部11和阳刻连接部12相互配合卡接实现积木块1的拼接搭建,积木块1形状多变便于搭建不同形状机器人,通过不同积木块1上的数据串口14相连,从而实现积木块1编程机器人的指令性运动。
40.如图1和图2所示,还包括控制系统2、输出类积木3、传感类积木4、电源积木5和遥控/编程积木6,控制系统2包括中央处理器21和无线传输模块22,控制系统2外还连接有显
示部23;输出类积木3包括马达输出31、光输出32和声音输出33,输出类积木3由控制系统2控制进行动作;传感类积木4包括红外感应模块41、声音感应模块42和光线感应模块43,传感类积木4还与控制系统2通信连接;遥控/编程积木6包括遥控装置61和多个编程模块62,遥控/编程积木6与控制系统2通信连接;电源积木5为充电座或电池中的一种,电源积木5为控制系统2、输出类积木3、传感类积木4和遥控/编程积木6供电,电源积木5上还设有电源开关51,电源开关51与无线传输模块22连接。克服现有技术中与机器人直接接触少的缺陷,通过不同功能积木块1的组建堆积,增加有效直接的肢体互动体验,提升使用者对机器人系统的理解及机械动作的理解,提高现有积木块1的实用性及运用程度。
41.除此之外,中央处理器21内存储有各积木块1的正常工作参数和/或工作寿命信息,并根据各积木块1的正常工作参数和/或工作寿命信息判断其是否需要更换或维修,若是,则进行本地和/或远程警示,通过预存信息实现系统预判性,提前提醒使用者更换或维修,防止故障发生,提高使用效率并保证安全性。
42.如图2所示,中央处理器21接受并处理无线传输模块22输送的数据,无线传输模块22采用蓝牙传输。显示部23显示有与中央处理器21和无线传输模块22的连接状态,还显示有电源积木5的电力状态和传感类积木4的工作状态。无线传输模块22上与遥控装置61通信连接,且通过无线传输模块22的蓝牙传输进行相连接,让使用者进行控制遥控装置61进而进行控制机器人,最终让其输出类马达根据用户需求进行相关的操作,显示部23显示积木块1各种工作状态,确保连接稳定和工作正常。
43.如图2所示,控制系统2中的中央处理器21与遥控装置61通过心跳信号的交互进行工作状态的相互检查,控制系统2中的中央处理器21与传感类积木4通过握手信号的交互进行工作状态的相互检查,确保中央处理器21与遥控装置61间通讯链路没有断开,保证之后的操作能够顺利进行,通过中央处理器21与传感类积木4的握手信号的交互,确保中央处理器21能有充足时间进行数据处理,减少数据溢出而造成的数据丢失,从而保证积木块1运动的连贯性和平稳性。
44.如图2所示,编程模块62包括多个子程序621,子程序621为循环程序、进程程序、定时程序和条件判断中的一种或多种,编程模块62内设置子程序621提升机器人智能化程度,可供选择的子程序621也减少编程时的抽象感,能够直观让使用者操作。
45.如图3所示,遥控装置61上设有开关按钮611、前进按钮612、左转按钮613、右转按钮614、后退按钮615、重复步骤按钮616、发送按钮617,和/或声音控制按钮618,在遥控装置61上设置多个按钮,从而通过按钮实现控制积木块1运动的目的,进而实现控制机器人的目的,遥控装置61使用方便且便于操作,按钮简洁也便于区分。
46.本模块化编程机器人的工作原理和使用方法:选用不同类型功能的多个积木块1搭建所需要的机器人,电源积木5为控制系统2、输出类积木3、传感类积木4和遥控/编程积木6供电,输出类积木3可以选用其中一种或多种,在控制系统2与传感类积木4的配合下,通过操作遥控装置61,控制最终的成品机器人进行运动,达到搭建编程机器人的目的。
47.上述说明示出并描述了本实用新型的优选实施例,如前所述,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述实用新型构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则
都应在本实用新型所附权利要求的保护范围内。