1.本实用新型涉及直升机,特别涉及直升机的动力模块,属于航空技术领域。
背景技术:
2.随着我国航空管制的放宽,中小型直升机特别是中小型无人直升机在民用、非战争中的军事任务执行、抢险救灾、工业级等场景上的应用越来越广泛,这种广泛的应用也促进了无人机技术的进一步发展,在目前的小型无人机市场上按照能源驱动供给形式来分有电动无人机和油动无人机,电动无人机结构简单、易于控制、成本低,但整体起飞重量小、续航时间短,油动无人机结构较为复杂、制造成本较高,但可以实现较长的续航时间,所以在小载荷、短续航时间的应用场景下电动无人机具有优势,而在大载荷长续航时间的应用场景下电动无人机显然不具有优势,油动无人机的细分市场在大起飞重量、长续航时间的应用场景下,只有在这种场景下油动无人机才能体现出其优势,所以在油动无人机与电动无人机商业化的竞争者中向大载荷的工业级发展是一个突破和方向,直升机要想实现大载荷,按照目前的飞行器设计思路需要大功率的发动机,目前应用在中小型无人机上的发动机有活塞发动机和涡轴发动机,涡轴发动机核心技术被国外控制、成本高,应用在商业化场景的直升机上在经济性上没有竞争力,活塞发动机成本相对低廉,但活塞发动机国内能够具有自主核心技术的也局限在小排量发动机上(如250cc以下排量的发动机),大排量的活塞发动机依靠进口,进口的发动机价格很高,在商业化的应用场景下与涡轴发动机一样没有竞争力,这就导致国内的大载荷的油动无人机应用和发展受阻,只有在必要的、不关注成本的场合采使用大载荷的油动无人机,由于使用量、飞行总量均不高,导致其除了发动机为短板之外其它方面创新发展也很慢,为了应对这种情况,国家科技规划以及相关发动机生产制造企业均有将大排量航空活塞发动机的研发作为技术攻关项目,发动机研发涉及的学科多、周期长,特别是即使完成了设计、制造,还需要进行长时间各种条件下的试验,但基于这种搭载大功率活塞发动机的直升机使用量、飞行总量均不高,无法为研制的大排量的活塞发动机提供足够大的试验平台,所以对于大排量的活塞发动机研发单位来说,其试验成本是非常高的,基本都是没有任何经济价值的试验飞行,不能将试验融入实际的应用中,所以这也导致了大载荷的油动无人机搭载的大功率发动机的研发收到了其应用场景有限的牵制,所以上述因素之间相互牵制导致大载荷油动无人机的应用和技术创新发展缓慢。
技术实现要素:
3.本实用新型的目的在于克服目前的大载荷直升机的应用和发展中存在的上述问题,提供一种直升机用多活塞发动机驱动的动力模块。
4.为实现本实用新型的目的,采用了下述的技术方案:直升机用多活塞发动机驱动的动力模块,所述的动力模块包括转动设置的输出轴,各活塞发动机的输出端安装有离合器,所述的动力模块包括多个活塞发动机,多个活塞发动机通过传动机构同时驱动输出轴。
5.进一步的;离合器的输出端安装有驱动同步轮,在转动设置的从动轴一端安装有
从动同步轮,另一端安装有驱动齿轮,输出轴上安装有从动齿轮,各个驱动齿轮均与从动齿轮相啮合。
6.进一步的;在输出轴上安装有传动齿轮,在转动设置的输入轴上安装有与传动齿轮相啮合的输入齿轮,离合器的输出端安装有驱动同步轮,输入轴上安装有从动同步轮,驱动同步轮通过同步带驱动从动同步轮。
7.本实用新型的积极有益技术效果在于:本动力模块可采用多个小排量的活塞发动机驱动形成大功率输出,经过试验,多个小排量的活塞发动机所有排量相加后的总和与同等排量的大排量活塞发动机驱动的功率相当,而且总重量还有所降低,因为小排量的活塞发动机国内的生产技术成熟,所以采用本动力模块可以实现大载荷油动无人机所需的大功率驱动,因为发动机国产化,所以其成本较进口的发动机大大降低,使大载荷直升机在商业化应用中经济性非常具有竞争力,这将促进大载荷直升机应用的场景、使用量、飞行次数、飞行时间大大增加,在频繁长时间的使用中大载荷直升机的各方面技术创新都会加快,同时也为国内大排量活塞发动机、甚至涡轮轴发动机的研发提供了很好的应用试验基础,必将加快国内相关技术的整体快速发展。
附图说明
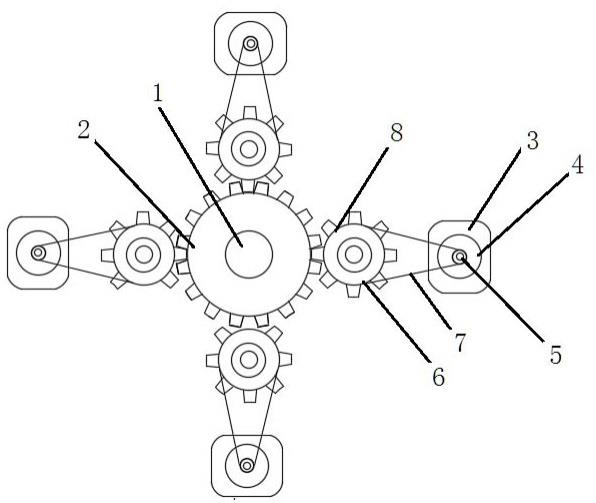
8.图1是第一实施例的俯视示意图。
9.图2是图1中的主视示意图。
10.图3是第二实施例的示意图。
具体实施方式
11.为了更充分的解释本实用新型的实施,提供本实用新型的实施实例。这些实施实例仅仅是对本实用新型的阐述,不限制本实用新型的范围。
12.结合附图对本实用新型进一步详细的解释,附图中各标记为:1:输出轴;2:从动齿轮;3:活塞发动机;4:离合器;5:驱动同步轮;6:从动同步轮;7:同步带;8:驱动齿轮;9:输入轴;10:输入齿轮;11:传动齿轮;12:从动轴。
13.如附图所示,直升机用多活塞发动机驱动的动力模块,所述的动力模块包括转动设置的输出轴1,所述的动力模块包括多个活塞发动机3,本实用新型中优选采用的活塞发动机为3个以上。以下两个实施例中,均示出了4个活塞发动机,多个活塞发动机通过传动机构同时驱动输出轴1,各活塞发动机的输出端安装有离合器4。
14.第一实施例:
15.如图1、图2所示,离合器的输出端安装有驱动同步轮5,在转动设置的从动轴12一端安装有从动同步轮6,另一端安装有驱动齿轮8,输出轴上安装有从动齿轮2,各个驱动齿轮均与从动齿轮相啮合。
16.第二实施例:
17.在输出轴上安装有传动齿轮11,在转动设置的输入轴9上安装有与传动齿轮相啮合的输入齿轮10,离合器的输出端安装有驱动同步轮5,输入轴上安装有从动同步轮6,驱动同步轮通过同步带6驱动从动同步轮。本实施例中,输入齿轮、传动齿轮均可采用锥齿轮。
18.本申请中的创新在于采用多个小排量的活塞发动机实现了大功率的输出模块。目
前已经在单旋翼上进行了成功试验,试验采用两台国产170cc活塞发动机驱动单旋翼油动无人机,单台170cc活塞发动机驱动的油动无人机最大起飞重量约为50kg, 其中有效载荷为17kg左右;无人机自身重量与有效载荷之比约为2:1。采用两台170cc排量的活塞发动机,无人机的最大起飞重量约为150kg,与进口的350cc排量的发动机驱动的无人机最大起飞重基本量相当,无人机自身重量与有效载荷之比约为1.5:1。采用四台170cc活塞发动机经过试验完全也可以实现接近750cc排量的发动机的功率,所以本申请的技术方案完全可行。
19.在详细说明本实用新型的实施方式之后,熟悉该项技术的人士可清楚地了解,在不脱离上述申请专利范围与精神下可进行各种变化与修改,凡依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均属于本实用新型技术方案的范围,且本实用新型亦不受限于说明书中所举实例的实施方式。
技术特征:
1.直升机用多活塞发动机驱动的动力模块,所述的动力模块包括转动设置的输出轴,其特征在于:所述的动力模块包括多个活塞发动机,各活塞发动机的输出端安装有离合器,多个活塞发动机通过传动机构同时驱动输出轴。2.根据权利要求1所述的直升机用多活塞发动机驱动的动力模块,其特征在于:离合器的输出端安装有驱动同步轮,在转动设置的从动轴一端安装有从动同步轮,另一端安装有驱动齿轮,输出轴上安装有从动齿轮,各个驱动齿轮均与从动齿轮相啮合。3.根据权利要求1所述的直升机用多活塞发动机驱动的动力模块,其特征在于:在输出轴上安装有传动齿轮,在转动设置的输入轴上安装有与传动齿轮相啮合的输入齿轮,离合器的输出端安装有驱动同步轮,输入轴上安装有从动同步轮,驱动同步轮通过同步带驱动从动同步轮。
技术总结
直升机用多活塞发动机驱动的动力模块,所述的动力模块包括转动设置的输出轴,所述的动力模块包括多个活塞发动机,多个活塞发动机通过传动机构同时驱动输出轴。本动力模块可采用多个小排量的活塞发动机驱动形成大功率输出,经过试验,多个小排量的活塞发动机所有排量相加后的总和与同等排量的大排量活塞发动机驱动的功率相当,这将促进大载荷直升机应用的场景、使用量、飞行次数、飞行时间大大增加,在频繁长时间的使用中大载荷直升机的各方面技术创新都会加快。创新都会加快。创新都会加快。
技术研发人员:于进峰 张涛 孟令恩
受保护的技术使用者:河南坤宇无人机科技有限公司
技术研发日:2021.04.20
技术公布日:2022/1/21