1.本技术属于飞机自动飞行控制系统领域,特别涉及一种自动油门马赫数控制方法。
背景技术:
2.在飞机正常飞行中,自动油门可以代替飞行员来控制飞机的油门杆,从而极大降低飞行员的驾驶疲劳,实现长时间飞行。自动油门最常用的一种工作方式是配合升降舵控制,实现自动飞行纵向工作模态控制,如在通过控制升降舵实现俯仰角控制、高度保持、垂直速度控制、航迹倾角控制等的同时,可使用自动油门实现速度控制,其中马赫数控制就依赖于自动油门来实现,而以上自动油门的工作方式对自动油门提出要求: a)自动油门马赫数控制要有较高的控制精度,不能超出允许范围;b)在进行自动油门马赫数控制时,油门杆的移动要稳定平稳,不能频繁晃动。
3.现有技术一般采用目标马赫数与现时马赫数作差,通过比例微分计算出控制值,实现油门杆的控制,该控制方式的缺点是控制精度较低,对油门杆控制时出现抖动。
4.因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现要素:
5.本技术的目的是提供了一种自动油门马赫数控制方法,以解决现有技术存在的至少一个问题。
6.本技术的技术方案是:
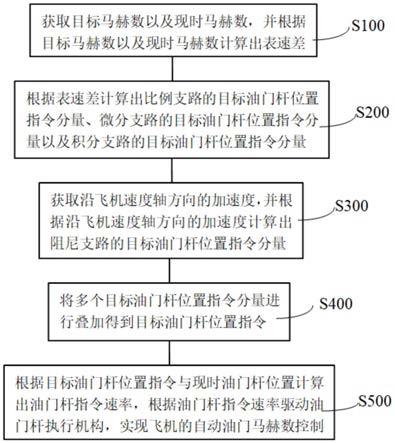
7.一种自动油门马赫数控制方法,包括:
8.步骤一、获取目标马赫数以及现时马赫数,并根据所述目标马赫数以及所述现时马赫数计算出表速差;
9.步骤二、根据所述表速差计算出比例支路的目标油门杆位置指令分量、微分支路的目标油门杆位置指令分量以及积分支路的目标油门杆位置指令分量;
10.步骤三、获取沿飞机速度轴方向的加速度,并根据沿飞机速度轴方向的加速度计算出阻尼支路的目标油门杆位置指令分量;
11.步骤四、将多个所述目标油门杆位置指令分量进行叠加得到目标油门杆位置指令;
12.步骤五、根据所述目标油门杆位置指令与现时油门杆位置计算出油门杆指令速率,根据所述油门杆指令速率驱动油门杆执行机构,实现飞机的自动油门马赫数控制。
13.在本技术至少一个实施例中,步骤一中,所述获取目标马赫数以及现时马赫数,并根据所述目标马赫数以及所述现时马赫数计算出表速差包括:
14.获取目标马赫数d_ma;
15.获取现时马赫数ma;
16.根据所述目标马赫数以及所述现时马赫数计算出表速差dc_vi:
17.dc_vi=(d_ma-ma)*k1
18.其中,k1为增益,取值范围为800~1000。
19.在本技术至少一个实施例中,步骤二中,所述根据所述表速差计算出比例支路的目标油门杆位置指令分量包括:
20.通过将所述表速差乘以增益k2计算得到比例支路的目标油门杆位置指令分量lever_pos_cmd1:
21.lever_pos_cmd1=dc_vi*k2
22.其中,k2的取值范围为:1.5~2.5。
23.在本技术至少一个实施例中,步骤二中,所述根据所述表速差计算出微分支路的目标油门杆位置指令分量包括:
24.通过将所述表速差乘以计算得到微分支路的目标油门杆位置指令分量lever_pos_cmd2:
[0025][0026]
其中,k3的取值范围为:0.8~1.5。
[0027]
在本技术至少一个实施例中,步骤二中,所述根据所述表速差计算出积分支路的目标油门杆位置指令分量包括:
[0028]
通过将乘以增益k4后经动态限幅后计算得到积分支路的输入dc_vi_int:
[0029]
dc_vi_int=dc_vi*k4+lim_dy
[0030]
其中,k4的取值范围为:0.08~0.15,lim_dy为动态限幅值;
[0031]
将积分支路的输入dc_vi_int乘以计算得到积分支路的目标油门杆位置指令分量lever_pos_cmd3:
[0032][0033]
在本技术至少一个实施例中,lim_dy取值随目标油门杆位置指令变化,当目标油门杆位置指令大于40
°
时,其值为40
°
减去目标油门杆位置指令;当目标油门杆位置指令小于0.5
°
时,其值为0.5
°
减去目标油门杆位置指令;当目标油门杆位置指令介于0.5
°
与40
°
之间时,其值为零。
[0034]
在本技术至少一个实施例中,步骤三中,所述获取沿飞机速度轴方向的加速度,并根据沿飞机速度轴方向的加速度计算出阻尼支路的目标油门杆位置指令分量包括:
[0035]
获取飞机前向过载n
x
、法向过载nz、迎角α、俯仰角θ、滚转角φ,计算出沿飞机速度轴方向的加速度a_c:
[0036]
a_c=n
x
*cosα+nz*sinα-sin(θ-α*cosφ)
[0037]
将沿飞机速度轴方向的加速度a_c乘以惯性环节计算得到阻尼支路的目标油门杆位置指令分量lever_pos_cmd4:
[0038][0039]
其中,k5的取值范围为:75~180。
[0040]
在本技术至少一个实施例中,步骤四中,所述将多个所述目标油门杆位置指令分量进行叠加得到目标油门杆位置指令包括:
[0041]
将比例支路的目标油门杆位置指令分量、微分支路的目标油门杆位置指令分量、积分支路的目标油门杆位置指令分量以及阻尼支路的目标油门杆位置指令分量进行叠加得到目标油门杆位置指令 lever_pos_cmd:
[0042][0043]
在本技术至少一个实施例中,步骤五中,所述根据所述目标油门杆位置指令与现时油门杆位置计算出油门杆指令速率包括:
[0044]
油门杆指令速率lever_rate_cmd为:
[0045][0046]
其中,lever_pos为现时油门杆位置,为限幅器,k6的取值范围为0.8~1.5。
[0047]
在本技术至少一个实施例中,的上限为40
°
,下限为0.5
°
。
[0048]
发明至少存在以下有益技术效果:
[0049]
本技术的自动油门马赫数控制方法,将目标马赫数与飞机现时马赫数的差值转化为表速差后,经过比例、微分、积分环节后与沿飞机速度轴方向的纵向过载叠加形成目标油门杆位置指令,其中沿飞机速度轴方向的纵向过载为马赫数差值支路提供阻尼,将目标油门杆位置经过限幅后与飞机现时油门杆位置作差得到油门杆位置偏差,将该偏差经过增益转换为油门杆指令速率,驱动油门杆执行机构实现马赫数控制;本技术在算法结构上具有比例、微分、积分的特征,能够在确保油门杆稳定移动的同时,有效提高马赫数的控制精度,使自动油门马赫数控制更加可靠。
附图说明
[0050]
图1是本技术一个实施方式的自动油门马赫数控制方法流程图;
[0051]
图2是本技术一个实施方式的自动油门马赫数控制方法设计原理图。
具体实施方式
[0052]
为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。下
面结合附图对本技术的实施例进行详细说明。
[0053]
在本技术的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术保护范围的限制。
[0054]
下面结合附图1至图2对本技术做进一步详细说明。
[0055]
本技术提供了一种自动油门马赫数控制方法,包括以下步骤:
[0056]
s100、获取目标马赫数以及现时马赫数,并根据目标马赫数以及现时马赫数计算出表速差;
[0057]
s200、根据表速差计算出比例支路的目标油门杆位置指令分量、微分支路的目标油门杆位置指令分量以及积分支路的目标油门杆位置指令分量;
[0058]
s300、获取沿飞机速度轴方向的加速度,并根据沿飞机速度轴方向的加速度计算出阻尼支路的目标油门杆位置指令分量;
[0059]
s400、将多个目标油门杆位置指令分量进行叠加得到目标油门杆位置指令;
[0060]
s500、根据目标油门杆位置指令与现时油门杆位置计算出油门杆指令速率,根据油门杆指令速率驱动油门杆执行机构,实现飞机的自动油门马赫数控制。
[0061]
本技术的自动油门马赫数控制方法,s100中,获取目标马赫数以及现时马赫数,并根据目标马赫数以及现时马赫数计算出表速差包括:
[0062]
获取目标马赫数d_ma;
[0063]
获取现时马赫数ma;
[0064]
根据目标马赫数以及现时马赫数计算出表速差dc_vi:
[0065]
dc_vi=(d_ma-ma)*k1
[0066]
其中,k1为增益,取值范围为800~1000。
[0067]
本技术的自动油门马赫数控制方法,增益k1的选取采用以下方式:标准海平面处马赫数和表速之间的第一转换系数,以及飞机许可的飞行高度处(一般高度为12km)马赫数和表速之间的第二转换系数,在第一转换系数与第二转换系数之间截取适当的范围为k1。其中,ma=v
表速
/v 音速
,v
音速
随高度变化,当表速为1m/s时,v
音速
的值就是转换系数。
[0068]
本技术的自动油门马赫数控制方法,s200中,分别根据表速差计算出比例支路的目标油门杆位置指令分量、微分支路的目标油门杆位置指令分量以及积分支路的目标油门杆位置指令分量,具体的:
[0069]
根据表速差计算出比例支路的目标油门杆位置指令分量包括:
[0070]
通过将表速差乘以增益k2计算得到比例支路的目标油门杆位置指令分量lever_pos_cmd1:
[0071]
lever_pos_cmd1=dc_vi*k2
[0072]
其中,k2的取值范围为:1.5~2.5。
[0073]
根据表速差计算出微分支路的目标油门杆位置指令分量包括:
[0074]
通过将表速差乘以计算得到微分支路的目标油门杆位置指令分量lever_
pos_cmd2:
[0075][0076]
其中,k3的取值范围为:0.8~1.5。
[0077]
根据表速差计算出积分支路的目标油门杆位置指令分量包括:
[0078]
通过将乘以增益k4后经动态限幅后计算得到积分支路的输入 dc_vi_int:
[0079]
dc_vi_int=dc_vi*k4+lim_dy
[0080]
其中,k4的取值范围为:0.08~0.15,lim_dy为动态限幅值;
[0081]
将积分支路的输入dc_vi_int乘以计算得到积分支路的目标油门杆位置指令分量lever_pos_cmd3:
[0082][0083]
其中,lim_dy取值随目标油门杆位置指令变化,当目标油门杆位置指令大于40
°
时,其值为40
°
减去目标油门杆位置指令;当目标油门杆位置指令小于0.5
°
时,其值为0.5
°
减去目标油门杆位置指令;当目标油门杆位置指令介于0.5
°
与40
°
之间时,其值为零。将表速差积分支路的输入进行动态限幅,即积分器递增的最大值为最大油门杆位置(40
°
)与目标油门杆位置的差值,最小值为最小油门杆位置(0.5
°
)与目标油门杆位置的差值,防止积分器输出饱和。
[0084]
本技术的自动油门马赫数控制方法,s300中,获取沿飞机速度轴方向的加速度,并根据沿飞机速度轴方向的加速度计算出阻尼支路的目标油门杆位置指令分量包括:
[0085]
获取飞机前向过载n
x
、法向过载nz、迎角α、俯仰角θ、滚转角φ,计算出沿飞机速度轴方向的加速度a_c:
[0086]
a_c=n
x
*cosα+nz*sinα-sin(θ-α*cosφ)
[0087]
将沿飞机速度轴方向的加速度a_c乘以惯性环节计算得到阻尼支路的目标油门杆位置指令分量lever_pos_cmd4:
[0088][0089]
其中,k5的取值范围为:75~180。
[0090]
通过上述方式获得各个目标油门杆位置指令分量后,将多个目标油门杆位置指令分量进行叠加得到目标油门杆位置指令包括:
[0091]
将比例支路的目标油门杆位置指令分量、微分支路的目标油门杆位置指令分量、积分支路的目标油门杆位置指令分量以及阻尼支路的目标油门杆位置指令分量进行叠加得到目标油门杆位置指令 lever_pos_cmd:
[0092][0093]
得到目标油门杆位置指令后,根据目标油门杆位置指令与现时油门杆位置计算出
油门杆指令速率包括:
[0094]
油门杆指令速率lever_rate_cmd为:
[0095][0096]
其中,lever_pos为现时油门杆位置,为限幅器,k6的取值范围为0.8~1.5。的上限为40
°
,下限为0.5
°
。
[0097]
计算得到油门杆指令速率后,驱动油门杆执行机构带动油门杆运动,改变发动机推力进而使现时马赫数跟踪目标马赫数,实现飞机在自动飞行的平飞或者爬升/下降阶段的马赫数控制。
[0098]
本技术的自动油门马赫数控制方法,将目标马赫数d_ma与飞机现时马赫数ma的差值转化为表速差dc_vi,表速差经过比例 lever_pos_cmd1、积分lever_pos_cmd3、微分 lever_pos_cmd2环节后与沿飞机速度轴方向的纵向过载a_c的阻尼支路lever_pos_cmd4叠加形成目标油门杆位置指令lever_pos_cmd,将目标油门杆位置lever_pos_cmd经过限幅器的限幅后与飞机现时油门杆位置lever_pos作差得到油门杆位置偏差,将该偏差经过增益转换为油门杆指令速率lever_rate_cmd,驱动油门杆执行机构实现马赫数控制。其中,马赫数差通过增益系数k1转化为表速差。表速差的积分支路的目标油门杆位置分量 lever_pos_cmd1是经过动态限幅lim_dy限幅后计算得到。沿飞机速度轴方向的纵向过载a_c由前向过载n
x
、法向过载nz;迎角α、俯仰角θ、滚转角φ计算得到。速度差的比例、微分、积分、阻尼支路分别经过增益系数k2、k3、k4、k5。目标油门杆位置经过限幅器限幅,限幅范围为0.5
°
~40
°
。
[0099]
本技术的自动油门马赫数控制方法,通过控制油门杆位置来控制马赫数,在算法结构上具有比例、微分、积分的特征,能够在确保油门杆稳定移动的同时,有效提高马赫数的控制精度,使自动油门马赫数控制更加可靠,进而提高飞机的飞行品质。
[0100]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。