1.本技术属于飞机主操纵系统疲劳试验状态监测及其故障排查技术领域,具体涉及一种飞机主操纵系统疲劳试验状态监测及其故障排查方法。
背景技术:
2.飞机主操纵系统施加飞机操纵载荷及位移协调加载谱,对飞机主操纵系统进行疲劳控制加载,进行飞机主操纵系统的疲劳试验,是考核飞机主操纵系统疲劳寿命及性能指标的重要手段。
3.对飞机主操纵系统进行疲劳试验时,若飞机主操纵系统的动作与施加的操纵载荷及位移协调加载谱不相符,则飞机主操纵系统状态异常,对飞机主操纵系统的疲劳试验无效,若不能够及时的发现飞机主操纵系统状态异常,会极大的延长试验周期,浪费大量的人力、物力,甚至于出现安全事故。
4.当前,飞机主操纵系统进行疲劳试验中,对于飞机主操纵系统状态是否异常,主要是通过现场的目视或手动进行检查,然而,在飞机主操纵系统与机体疲劳同试的情况下,飞机操纵载荷及位移协调加载谱在驾驶舱内进行施加,而驾驶舱舱盖,机身、机翼的检查维护以及承力口盖均予以封闭,对于飞机主操纵系统状态是否异常,不能够通过现场的目视或手动进行检查实现,对于飞机主操纵系统状态出现的异常不能够及时的发现。
5.此外,飞机主操纵系统进行疲劳试验中,对于检查飞机主操纵系统状态出现异常的情形,缺少有效的手段可靠、高效的定位故障区域,在不同程度上导致试验周期的延长。
6.鉴于上述技术缺陷的存在提出本技术。
7.需注意的是,以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本技术的申请日已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现要素:
8.本技术的目的是提供一种飞机主操纵系统疲劳试验状态监测及其故障排查方法,以克服或减轻已知存在的至少一方面的技术缺陷。
9.本技术的技术方案是:
10.一方面提供一种飞机主操纵系统疲劳试验状态监测方法,包括:
11.确定飞机主操纵系统疲劳试验中,关键的动作部位;
12.对关键动作部位动作的典型动作位置进行标记;
13.设置监测相机,基于标记的典型动作位置,监测关键动作部位的动作位置是否与施加的操纵载荷及位移协调加载谱相符;
14.若关键动作部位的动作位置与施加的操纵载荷及位移协调加载谱相符,则表明飞机主操纵系统的状态正常;
15.若关键动作部位的动作位置与施加的操纵载荷及位移协调加载谱不相符,则表明
飞机主操纵系统的状态异常。
16.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验状态监测方法中,关键动作部位包括:
17.副翼操纵系统的副翼驾驶杆、模拟副翼助力器操纵假件;
18.平尾操纵系统的平尾驾驶杆、模拟平尾助力器操纵假件、平尾力臂调节装置;
19.方向舵操纵系统的左右脚蹬、模拟方向舵复合舵机操纵假件、方向舵偏角限制器。
20.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验状态监测方法中,副翼驾驶杆动作的典型动作位置为其加载控制点的中立位置、左偏极限位置、右偏极限位置;
21.模拟副翼助力器操纵假件动作的典型动作位置为其活塞杆对应于副翼驾驶杆中立位置、左偏极限位置、右偏极限位置的伸出位置;
22.平尾驾驶杆动作的典型动作位置为其加载控制点的中立位置,以及对应于平尾大、中、小力臂情况的前推极限位置、后拉极限位置;
23.模拟平尾助力器操纵假件动作的典型动作位置为其活塞杆对应于平尾驾驶杆中立位置、前推极限位置、后拉极限位置的伸出位置;
24.平尾力臂调节装置动作的典型动作位置为大、中、小力臂位置;
25.左右脚蹬的典型动作位置为其加载控制点的中立位置,以及对应于方向舵大、小速度状态的向前极限位置;
26.模拟方向舵复合舵机操纵假件动作的典型动作位置为其活塞杆对应于左右脚蹬中立位置、向前极限位置的伸出位置;
27.方向舵偏角限制器的典型动作位置为其伸出端在大、小速度状态下对方向舵的限偏位置。
28.另一方面提供一种飞机主操纵系统疲劳试验故障排查方法,包括:
29.基于任一上述的飞机主操纵系统疲劳试验状态监测方法,对飞机主操纵系统的状态进行监测;
30.若监测飞机主操纵系统的状态异常,则对加载控制方面的故障进行排查;
31.排除加载控制方面的故障后,对飞机主操纵系统成品件及假件方面的故障进行排查;
32.排除飞机主操纵系统成品件及假件方面的故障后,对飞机主操纵系统结构方面的故障进行排查。
33.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,对加载控制方面的故障进行排查,具体为:
34.将操纵载荷及位移实时加载曲线数据与正常的曲线数据进行对比分析;
35.检查副翼驾驶杆中立位置、左偏极限位置、右偏极限位置,平尾驾驶杆中立位置、前推极限位置、后拉极限位置,以及左右脚蹬中立位置、向前极限位置,是否与控制加载的零位及最大控制位移对应一致;
36.若操纵载荷及位移实时加载曲线数据与正常的曲线数据一致,且副翼驶杆中立位置、左偏极限位置、右偏极限位置,平尾驾驶杆中立位置、前推极限位置、后拉极限位置,以及左右脚蹬中立位置、向前极限位置,与控制加载的零位及最大控制位移对应一致,则排除加载控制方面的故障;
37.其中,
38.操纵载荷及位移实时加载曲线数据包括副翼驾驶杆、平尾驾驶杆、左右脚蹬加载控制点的初值数据,在副翼驾驶杆、平尾驾驶杆、左右脚蹬加载控制点处采集,能够反映副翼、平尾、方向舵操纵载荷及位移协调加载的历程曲线特征,以及反映副翼、平尾、方向舵的初值变化范围。
39.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,对飞机主操纵系统成品件及假件方面的故障进行排查,具体为:
40.对模拟副翼助力器操纵假件、模拟平尾助力器操纵假件、平尾力臂调节装置、模拟方向舵复合舵机操纵假件、方向舵偏角限制器中,动作位置与操纵载荷及位移协调加载谱不相符的,进行故障排查。
41.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,对飞机主操纵系统结构方面的故障进行排查,具体为:
42.根据操纵载荷及位移实时加载曲线数据,结合现场的目视、手感、听声,确定飞机主操纵系统状态异常的区域,排查飞机主操纵系统状态异常区域内的部件是否出现疲劳损伤、磨损间隙、连接松动、卡滞。
43.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,若飞机主操纵系统状态异常的区域有多处,则按照飞机主操纵系统的走向逐一进行排查。
附图说明
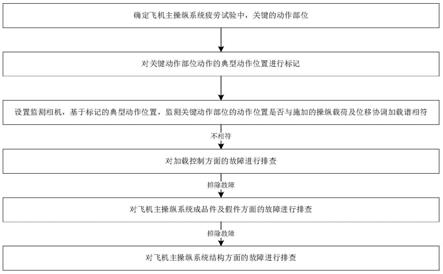
44.图1是本技术实施例提供的飞机主操纵系统疲劳试验状态监测及其故障排查方法的流程图。
45.为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;此外,附图用于示例性说明,其中描述位置关系的用语仅限于示例性说明,不能理解为对本专利的限制。
具体实施方式
46.为使本技术的技术方案及其优点更加清楚,下面将结合附图对本技术的技术方案作进一步清楚、完整的详细描述,可以理解的是,此处所描述的具体实施例仅是本技术的部分实施例,其仅用于解释本技术,而非对本技术的限定。需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分,其他相关部分可参考通常设计,在不冲突的情况下,本技术中的实施例及实施例中的技术特征可以相互组合以得到新的实施例。
47.此外,除非另有定义,本技术描述中所使用的技术术语或者科学术语应当为本技术所属领域内一般技术人员所理解的通常含义。本技术描述中所使用的“上”、“下”、“左”、“右”、“中心”、“竖直”、“水平”、“内”、“外”等表示方位的词语仅用以表示相对的方向或者位置关系,而非暗示装置或元件必须具有特定的方位、以特定的方位构造和操作,当被描述对象的绝对位置发生改变后,其相对位置关系也可能发生相应的改变,因此不能理解为对本技术的限制。本技术描述中所使用的“第一”、“第二”、“第三”以及类似用语,仅用于描述目的,用以区分不同的组成部分,而不能够将其理解为指示或暗示相对重要性。本技术描述中所使用的“一个”、“一”或者“该”等类似词语,不应理解为对数量的绝对限制,而应理解为存
在至少一个。本技术描述中所使用的“包括”或者“包含”等类似词语意指出现在该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
48.此外,还需要说明的是,除非另有明确的规定和限定,在本技术的描述中使用的“安装”、“相连”、“连接”等类似词语应做广义理解,例如,连接可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通,领域内技术人员可根据具体情况理解其在本技术中的具体含义。
49.下面结合附图1对本技术做进一步详细说明。
50.一方面提供一种飞机主操纵系统疲劳试验状态监测方法,包括:
51.确定飞机主操纵系统疲劳试验中,关键的动作部位;
52.对关键动作部位动作的典型动作位置进行标记,具体可以是进行划线标记;
53.设置监测相机,基于标记的典型动作位置,监测关键动作部位的动作位置是否与施加的操纵载荷及位移协调加载谱相符;
54.若关键动作部位的动作位置与施加的操纵载荷及位移协调加载谱相符,则表明飞机主操纵系统的状态正常;
55.若关键动作部位的动作位置与施加的操纵载荷及位移协调加载谱不相符,则表明飞机主操纵系统的状态异常。
56.对于上述实施例公开的飞机主操纵系统疲劳试验状态监测方法,领域内技术人员可以理解的是,其选取飞机主操纵系统的关键动作部位,标记关键动作部位动作的典型动作位置,以标记的典型动作位置为基准,通过监测相机的实时拍摄的图像,判断关键动作部位的动作位置是否与施加的操纵载荷及位移协调加载谱相符,若关键动作部位的动作位置与施加的操纵载荷及位移协调加载谱不相符,判断飞机主操纵系统的状态异常,对于飞机主操作系统的异常的监测具有较高的时效性,即使是在飞机主操纵系统与机体疲劳同试,驾驶舱舱盖,机身、机翼的检查维护以及承力口盖均予以封闭的情况下,仍可及时的发现飞机主操作系统状态的异常,以此能够缩短试验周期,节约人力、物力,以及避免出现安全事故。
57.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验状态监测方法中,关键动作部位包括:
58.副翼操纵系统的副翼驾驶杆、模拟副翼助力器操纵假件;
59.平尾操纵系统的平尾驾驶杆、模拟平尾助力器操纵假件、平尾力臂调节装置;
60.方向舵操纵系统的左右脚蹬、模拟方向舵复合舵机操纵假件、方向舵偏角限制器。
61.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验状态监测方法中,副翼驾驶杆动作的典型动作位置为其加载控制点的中立位置、左偏极限位置、右偏极限位置;
62.模拟副翼助力器操纵假件动作的典型动作位置为其活塞杆对应于副翼驾驶杆中立位置、左偏极限位置、右偏极限位置的伸出位置;
63.平尾驾驶杆动作的典型动作位置为其加载控制点的中立位置,以及对应于平尾大、中、小力臂情况的前推极限位置、后拉极限位置;
64.模拟平尾助力器操纵假件动作的典型动作位置为其活塞杆对应于平尾驾驶杆中
立位置、前推极限位置、后拉极限位置的伸出位置;
65.平尾力臂调节装置动作的典型动作位置为大、中、小力臂位置;
66.左右脚蹬的典型动作位置为其加载控制点的中立位置,以及对应于方向舵大、小速度状态的向前极限位置;
67.模拟方向舵复合舵机操纵假件动作的典型动作位置为其活塞杆对应于左右脚蹬中立位置、向前极限位置的伸出位置;
68.方向舵偏角限制器的典型动作位置为其伸出端在大、小速度状态下对方向舵的限偏位置。
69.另一方面提供一种飞机主操纵系统疲劳试验故障排查方法,包括:
70.基于任一上述的飞机主操纵系统疲劳试验状态监测方法,对飞机主操纵系统的状态进行监测;
71.若监测飞机主操纵系统的状态异常,则对加载控制方面的故障进行排查;
72.排除加载控制方面的故障后,对飞机主操纵系统成品件及假件方面的故障进行排查;
73.排除飞机主操纵系统成品件及假件方面的故障后,对飞机主操纵系统结构方面的故障进行排查。
74.对于上述实施例公开的飞机主操纵系统疲劳试验故障排查方法法,领域内技术人员可以理解的是,其基于飞机主操纵系统疲劳试验状态监测方法对飞机主操纵系统的状态进行监测,并在监测飞机主操纵系统的状态异常时,给出故障排查的方法,先后从加载控制、飞机主操纵系统成品件及假件、飞机主操纵系统结构的层面对故障进行排查,可迅速准确的定位故障区域,缩短试验区域。
75.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,对加载控制方面的故障进行排查,具体为:
76.将操纵载荷及位移实时加载曲线数据与正常的曲线数据进行对比分析;
77.检查副翼驾驶杆中立位置、左偏极限位置、右偏极限位置,平尾驾驶杆中立位置、前推极限位置、后拉极限位置,以及左右脚蹬中立位置、向前极限位置,是否与控制加载的零位及最大控制位移对应一致;
78.若操纵载荷及位移实时加载曲线数据与正常的曲线数据一致,且副翼驶杆中立位置、左偏极限位置、右偏极限位置,平尾驾驶杆中立位置、前推极限位置、后拉极限位置,以及左右脚蹬中立位置、向前极限位置,与控制加载的零位及最大控制位移对应一致,则排除加载控制方面的故障;
79.其中,
80.操纵载荷及位移实时加载曲线数据包括副翼驾驶杆、平尾驾驶杆、左右脚蹬加载控制点的初值数据,在副翼驾驶杆、平尾驾驶杆、左右脚蹬加载控制点处采集,能够反映副翼、平尾、方向舵操纵载荷及位移协调加载的历程曲线特征,以及反映副翼、平尾、方向舵的初值变化范围。
81.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,对飞机主操纵系统成品件及假件方面的故障进行排查,具体为:
82.对模拟副翼助力器操纵假件、模拟平尾助力器操纵假件、平尾力臂调节装置、模拟
方向舵复合舵机操纵假件、方向舵偏角限制器中,动作位置与操纵载荷及位移协调加载谱不相符的,进行故障排查。
83.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,对飞机主操纵系统结构方面的故障进行排查,具体为:
84.根据操纵载荷及位移实时加载曲线数据,结合现场的目视、手感、听声,确定飞机主操纵系统状态异常的区域,排查飞机主操纵系统状态异常区域内的部件是否出现疲劳损伤、磨损间隙、连接松动、卡滞。
85.在一些可选的实施例中,上述的飞机主操纵系统疲劳试验故障排查方法中,若飞机主操纵系统状态异常的区域有多处,则按照飞机主操纵系统的走向逐一进行排查,可以是从驾驶舱向机尾方向逐一进行排查。
86.说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
87.至此,已经结合附图所示的优选实施方式描述了本技术的技术方案,领域内技术人员应该理解的是,本技术的保护范围显然不局限于这些具体实施方式,在不偏离本技术的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本技术的保护范围之内。