1.本实用新型涉及无人机起降的技术领域,尤其涉及一种无人机收放平台。
背景技术:
2.现有的无人机使用的无人机起降平台一般分为固定式起降平台与水平调整式起降平台两类,其中固定式起降平台主要提供一个水平基座即可实现,在不同应用场合,固定式起降平台存在一定差异,但根本上都是通过一定方式实现无人机起降平台实现水平,水平调整式起降平台例如固定机巢采用的起降平台,常采用导轨方式实现无人机起降平台的收放作业。
3.但导轨式结构的起降平台结构复杂,实现一个方向的运动就需要一个方向的导轨,实现多维运动就需要多维机械结构实现,并且其占用空间大,起降平台运动依赖导轨,导轨方式也容易落灰,长时间使用导轨磨损大。
技术实现要素:
4.本实用新型实施例提供了一种无人机收放平台,以解决现有技术导轨式无人机起降平台占用空间大,机械结构复杂的问题的缺陷。
5.本实用新型实施例提供了一种无人机收放平台,包括由多个关节臂相互转动连接组成的多关节机械臂与起降平板,所述起降平板与处于最前端的关节臂固接,所述多个关节臂可控制起降平板在空间内多角度运动,所述起降平板上设置有多个电磁锁,用于在无人机降落后将无人机固定。
6.进一步的,所述电磁锁包括伸缩块、卡扣、第一电磁弹簧与第二电磁弹簧,所述伸缩块与所述第一电磁弹簧连接,所述卡扣与所述第二电磁弹簧连接,所述伸缩块的侧面设有供卡扣插入的卡槽,所述第一电磁弹簧与所述第二电磁弹簧固定在起降平板上。
7.进一步的,所述起降平板的边界处设置有垂直于所述起降平板的挡板。
8.进一步的,所述起降平板底部设有风速传感器,用于测量环境风速。
9.进一步的,所述起降平板底部设有水平测量传感器,用于测量起降平台的水平状态。
10.进一步的,所述起降平板上设置有压力传感器,用于测量无人机是否降落。
11.进一步的,所述起降平板与处于最前端的关节臂通过焊接实现固定。
12.进一步的,所述起降平板内部设有通信模块与控制芯片,所述通信模块用于发送风速传感器、水平测量传感器以及压力传感器的数据,所述控制芯片用于根据水平测量传感器数据调整关节臂转动,使起降平板呈水平状态。
13.进一步的,多关节机械臂为三关节机械臂。
14.进一步的,起降平板的预定位置装有无人机消磁器。
15.本实用新型的有益效果是:因为通过多关节机械臂来代替起降平台,使得其适合在空间有限的移动机巢领域使用,大大减少了占用空间,并且起降平台上设有无人机电磁
固定装置,无人机用于车载场景时可以将起降平台垂直放置,无人机不会掉落,节省更多的空间。
附图说明
16.为了更清楚地说明本实用新型实施例的技术方案,下面将对本实用新型实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
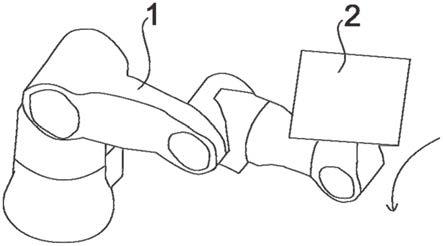
17.图1是本实用新型的整体结构示意图;
18.图2是本实用新型中起降平板的主视图;
19.图3是本实用新型中起降平板的左视图;
20.图4是本实用新型中起降平板的俯视图;
21.图5是本实用新型中起降平板倒扣的结构示意图;
22.图6是本实用新型中电磁锁的结构示意图;
23.图7是本实用新型固定状态下的结构示意图;
24.图中:1、关节臂;2、起降平板;3、电磁锁;31、伸缩块;32、卡扣;33、第一电磁弹簧;34、卡槽;35、第二电磁弹簧;4、挡板;5、风速传感器;6、压力传感器;7、水平测量传感器。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获取的所有其他实施例,都属于本实用新型保护的范围。
26.本实用新型包括由多个关节臂1相互转动连接组成的多关节机械臂与起降平板2,所述起降平板2与处于最上端的关节臂1固接,起降平板2与处于最上端的关节臂1通过焊接实现固定。所述多个关节臂1可控制起降平板2在空间内多角度运动,所述起降平板2上设置有多个电磁锁3,用于在无人机到达预定位置时将无人机固定,其中多关节机械臂为三关节机械臂,起降平板2的中心设置在关节臂1与起降平板2的接触面上。
27.电磁锁3包括伸缩块31、卡扣32、第一电磁弹簧33与第二电磁弹簧35,所述伸缩块31与所述第一电磁弹簧33连接,所述卡扣32与所述第二电磁弹簧35连接,所述伸缩块31的侧面设有供卡扣32插入的卡槽34,所述第一电磁弹簧33与所述第二电磁弹簧35固定在起降平板2上。
28.电磁锁3,包括:第一电磁弹簧33及伸缩块31,和第二电磁弹簧35及卡扣32构成。伸缩块31与第一电磁弹簧33连接,通电和断电产生的铁磁效应来控制弹簧进一步控制伸缩结构,构成可压入和弹出的结构,用来动作和解除对无人机的固定。在电磁力的作用下,伸缩块31伸出,伸缩块31侧面的卡槽34与单向卡扣32对齐,单向卡扣32与连接的弹簧配合,在第二电磁弹簧35的作用下,弹出单向卡扣32进入卡槽34,抵住伸缩块31,实现对无人机的更好的卡持效果。
29.其中电磁锁3的数量为六个,其中四个分别位于无人机的支架的两侧并将其夹住,
如图2和图4,另外两个中排的电磁锁3上的伸缩块31压住支架,从而将无人机固定。
30.所述起降平板2的边界处设置有垂直于所述起降平板2的挡板4,挡板4结构通过电机控制可向起降平板2外侧反转180
°
,如采用微型电机通过转轴带动挡板4转动,在无人机降落后。挡板4距离无人机桨在垂直方向有一定安全距离,挡板4结构用于防止无人机在接触电磁锁3后,在风力或者起降平台倾斜状态下滑落。起降平板2的预定位置装有无人机消磁器,用于辅助校准无人机的陀螺仪。
31.所述起降平板2上设有风速传感器5,用于测量环境风速。所述起降平板2上设有水平测量传感器7,用于测量起降平台的水平状态。所述起降平板2上设置有四个压力传感器6,用于测量无人机是否降落。所述起降平板2内部设有通信模块与控制芯片,所述通信模块用于发送风速传感器5、水平测量传感器7以及压力传感器6的数据,以利于无人机接收;所述控制芯片用于控制三关节臂1伸缩或根据关节臂1的中间的关节臂径向旋转,从而实现起降平板2呈现水平状态,通信模块与控制芯片为具有数据处理能力的单片机,由单片机来根据情况控制机械臂伸缩,和旋转,以及调整平板呈水平状态。还可以采用日本nova公司的mcx系列的控制芯片。
32.本实用新型的有益效果是:因为通过多关节机械臂来代替起降平台,使得其适合在空间有限的指挥车内的使用,大大减少了占用空间,并且起降平台上设有无人机电磁固定装置,无人机用于车载场景时可以将起降平台垂直放置,无人机不会掉落,节省更多的空间。
33.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。