1.本公开涉及无人配送技术领域,具体地,涉及一种货物传送机构、无人机的货物传送系统及建筑物。
背景技术:
2.随着电商紧急的快速发展、物流需求的急剧上升,无人配送已成为物流运输领域的发展趋势。在无人配送的相关技术中,无人机物流无法将货物配送到建筑物内部,特别是高层建筑物,需要通过与无人机对接的货物传送设备来将货物配送到建筑物内部,例如提升机。无人机将货物运送至楼顶停机区,交接给提升机,提升机运行至各楼层,将货物送寄给用户。但是需要对住宅进行相应的改造才能安装和使用提升机,成本较高,而且,提升机噪音大,并且有高度限制,不便于应用于高层建筑物。
技术实现要素:
3.本公开的目的是提供一种货物传送机构、无人机的货物传送系统及建筑物,该货物传送机构至少能够部分地解决上述问题。
4.为了实现上述目的,根据本公开的第一方面提供了一种货物传送机构,其包括:
5.导向组件,用于沿货物传送路径布置;
6.交接组件,所述交接组件包括安装件、转运件、货物抓手和第一驱动装置,所述安装件可移动地设置于所述导向组件,所述转运件可转动地设置于所述安装件,所述第一驱动装置用于驱动所述转运件相对于所述安装件转动,所述货物抓手设置于所述转运件的活动端,以跟随所述转运件转动来交接货物;
7.第二驱动装置,用于驱动所述安装件沿所述导向组件移动。
8.可选地,所述转运件包括摆臂,所述摆臂绕第一转轴可转动地设置于所述安装件,所述摆臂至少具有两个所述活动端以分别设置所述货物抓手。
9.可选地,所述摆臂为直线摆臂,两个所述活动端关于所述第一转轴对称设置。
10.可选地,所述交接组件还包括姿态保持组件,所述货物抓手通过所述姿态保持组件与所述转运件连接,以使所述货物抓手跟随所述转运件的转动而运动时能够保持预设姿态。
11.可选地,所述转运件通过第一转轴可转动地设置在所述安装件上,所述转运件具有两个所述活动端以分别设置所述货物抓手,所述姿态保持组件包括齿轮组件和与两个所述货物抓手一一对应的两组同步带组件,所述齿轮组件包括主动齿轮以及位于所述主动齿轮两侧并且分别与所述主动齿轮啮合的第一从动齿轮、第二从动齿轮,所述主动齿轮和所述转运件分别周向锁止地间隔套设于所述第一转轴,每个所述同步带组件均包括第二转轴、第三转轴、第一带轮、第二带轮以及套设在所述第一带轮和所述第二带轮上的扰性带,所述第二转轴周向锁止地穿设于所述第一带轮,并且所述第二转轴可转动地穿设于所述转运件,所述第三转轴周向锁止地穿设于所述第二带轮,并且所述第三转轴可转动地穿设于
所述转运件且与所述货物抓手传动连接,所述两组同步带组件分别位于所述主动齿轮的两侧,其中一组所述同步带组件中的所述第二转轴周向锁止地穿设于所述第一从动齿轮,另一组所述同步带组件中的所述第二转轴周向锁止地穿设于所述第二从动齿轮,所述同步带组件和所述齿轮组件的传动比均为1。
12.可选地,所述货物抓手包括吸盘、压缩机和安装座,所述压缩机用于驱动所述吸盘吸附或释放货物,所述安装座的一侧设置有所述吸盘,另一侧设置有所述压缩机,所述安装座与所述姿态保持组件传动连接。
13.可选地,同一所述转运件具有两个所述活动端以分别设置有所述货物抓手,位于同一转运件上的不同的所述货物抓手的所述吸盘的朝向相反。
14.可选地,所述导向组件包括用于固定于基础上的固定柱,所述固定柱的两侧均固定设置有导向件,所述导向件上开设有沿所述导向组件长度方向延伸的滑槽,所述安装件包括连接件和与所述滑槽一一对应的两个滑动件,所述转运件可转动地设置于所述连接件,所述连接件的两端分别通过所述滑动件与所述滑槽滑动配合。
15.可选地,所述导向组件还包括与所述固定柱固定连接的固定件,所述固定件设置于所述固定柱的背离所述安装件的一侧,所述固定件上开设有用于与基础连接的连接孔,所述固定件的数量为多个,并且沿所述固定柱的长度方向间隔设置。
16.可选地,所述第二驱动装置包括驱动电机、主动带轮、从动带轮以及套设于所述主动带轮和所述从动带轮的同步带,所述主动带轮和所述从动带轮分别可转动地设置于所述固定柱的两端,所述驱动电机用于驱动所述主动带轮转动,所述安装件的一端与所述同步带传动连接。
17.通过上述的技术方案,当将导向组件沿货物传送路径布置在建筑物上时,交接组件沿导向组件移动,从而带动货物沿货物传送路径运输,进而便于将货物运输到建筑物的各个楼层中。而且,由于设置有货物抓手的转运件既能够相对于导向件移动又能够相对于导向件转动,显著地增加了货物抓手的灵活性。转运件带动货物抓手相对于安装件转动,改变货物抓手的位置,使得货物抓手不仅能够跟随交接组件带动货物沿货物传送路径移动,还能够相对于安装件转动来更改货物抓手的角度和位置,从而便于货物抓手从货物配送起点抓取货物,也便于货物抓手将货物配送到用户家里,也便于在各个货物传送机构之间传输货物。而且,该货物传送机构便于安装,在应用于建筑物上时,不必对建筑物的做特意的改造,可直接将导向组件安装在建筑物的外墙上,通过交接组件将货物运输到用户的阳台或窗户处,方便用户拿取货物。
18.根据本公开的第二方面还提供了一种无人机的货物传送系统,其包括
19.无人机货物中转机构,用于与无人机之间交接货物;
20.储存组件,用于容纳货物并且固定在基础上;
21.上述的货物传送机构,布置在所述无人机货物中转机构和所述储存组件之间。
22.根据本公开的第三方面还提供了一种建筑物,包括建筑物主体和安装在该建筑物主体上的上述的货物传送系统。
23.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
24.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
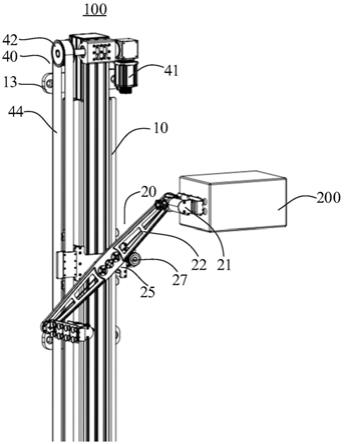
25.图1是一种示例性的货物传送机构局部的立体结构示意图;
26.图2是一种示例性的货物传送机构的部分结构的立体结构示意图;
27.图3是一种示例性的货物传送机构的相邻的交接组件之间交接货物的示意图;
28.图4是一种示例性的货物传送机构的交接组件的部分结构示意图;
29.图5是一种示例性的货物传送机构的姿态保持组件的结构示意图;
30.图6是一种示例性的货物传送机构的货物抓手的立体结构示意图;
31.图7是一种示例性的货物传送机构的安装件和导向组件的局部立体结构示意图。
32.附图标记说明
33.100-货物传送机构;10-导向组件;11-导向件;111-滑槽;12-固定柱;13-固定件;20-交接组件;21-货物抓手;211-吸盘;212-压缩机;213-安装座;22-转运件;221-摆臂;2211-活动端;222-第一转轴;25-安装件;251-连接件;252-滑动件;2521-滚轮;2522-支撑板;26-压板;27-第一驱动装置;30-姿态保持组件;31-第一从动齿轮;32-第二从动齿轮;33-主动齿轮;34-同步带组件;341-第二转轴;342-第三转轴;343-第一带轮;344-第二带轮;345-扰性带;40-第二驱动装置;41-驱动电机;42-主动带轮;43-从动带轮;44-同步带;200-货物。
具体实施方式
34.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
35.在未作相反说明的情况下,“内、外”是指相对于部件或结构本身轮廓的“内、外”。此外,需要说明的是,所使用的术语如“第一”、“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。另外,在参考附图的描述中,不同附图中的同一标记表示相同的要素。
36.为了便于将货物200沿传送路径进行配送,在本公开中如图1-7所示,提供了一种货物传送机构100。该货物传送机构100包括导向组件10和交接组件20。导向组件10用于沿货物传送路径布置,从而将货物200从运输起点传送到最终配送点。交接组件20包括安装件25、转运件22、货物抓手21和第一驱动装置27。安装件25可移动地设置于导向组件10,第二驱动装置40用于驱动安装件25沿导向组件10移动,从而带动整个交接组件20沿导向组件10滑动。转运件22可转动地设置于安装件25,第一驱动装置27用于驱动转运件22相对于安装件25转动。货物抓手21设置于转运件22的活动端2211,以跟随转运件22转动来交接货物200。当转运件22相对于安装件25转动时,带动位于活动端2211的货物抓手21转动,从而改变货物抓手21的位置和角度以交接货物200。
37.在本公开中为了便于说明以将货物传送机构100应用于建筑物上为例进行说明,通过该货物传送机构100将无人机的货物200配送到建筑物的各楼层。可以理解的是,该货物传送机构100能够被应用于任何两个地点之间的货物200传送,例如,山坡等自然场景中,或者,不便于物流小车行驶的不同的住户之间,本公开对此不作限制。
38.通过上述的技术方案,当将导向组件10沿货物传送路径布置在建筑物上时,交接组件20沿导向组件10移动,从而带动货物200沿货物传送路径运输,进而便于将货物200运输到建筑物的各个楼层中。而且,由于设置有货物抓手21的转运件22既能够相对于导向件11移动又能够相对于导向件11转动,显著地增加了货物抓手21的灵活性。转运件22带动货物抓手21相对于安装件25转动,改变货物抓手21的位置,使得货物抓手21不仅能够跟随交接组件20带动货物200沿货物传送路径移动,还能够相对于安装件25转动来更改货物抓手21的角度和位置,从而便于货物抓手21从货物200配送起点抓取货物200,也便于货物抓手21将货物200配送到用户家里,也便于在各个货物传送机构100之间传输货物200。而且,该货物传送机构100便于安装,在应用于建筑物上时,不必对建筑物的做特意的改造,可直接将导向组件10安装在建筑物的外墙上,通过交接组件20将货物200运输到用户的阳台或窗户处,方便用户拿取货物200。
39.为了能够适应不同建筑物的高度,在一种实施方式中,货物传送机构100包括多个货物交接模块,该货物交接模块包括上述的导向组件10和交接组件20。多个货物交接模块沿货物传输方向依次布置,以在货物运输起点和最终配送点之间传送货物200。
40.因此,可根据不同建筑物的高度来设置合适数量的货物交接模块,没有高度上的限制,从而使得该货物传送机构100能够适应于各种高度的建筑物,而且,该货物传送机构100方便安装,可直接安装在建筑物的外墙上,对建筑环境无特定要求。
41.在本公开中对转运件22的形状或结构不作限制,可根据实际货物传送场景进行设计,在本公开的一种实施方式中,如图1、图3和图4所示,转运件22包括摆臂221。摆臂221绕第一转轴222可转动地设置于安装件25。第一转轴222固定连接在安装件25上,摆臂221套设于第一转轴222并且相对于第一转轴222转动,或,第一转轴222固定在摆臂221上,摆臂221和第一转轴222共同相对于安装件25转动。摆臂221至少具有两个活动端2211以分别设置货物抓手21。
42.通过摆臂221的转动和安装件25的移动的配合,使得货物抓手21能够接触到在货物200传输路径上位于摆臂221长度(即货物抓手21与第一转轴222的距离)范围内的各个位置。而且,通过在同一摆臂221上设置多个货物抓手21,让多个货物抓手21共同作业,有助于提高货物200的传送效率。
43.进一步地,摆臂221为直线摆臂221,摆臂221上的两端为上述的活动端2211,两个活动端2211关于第一转轴222对称设置。
44.在在其他实施方式中,根据不同的货物200配送场景,摆臂221还可为曲线或折线摆臂221,本公开对摆臂221的具体形状不作限制。
45.在其他实施方式中,转运件22可包括转盘,转盘绕第一转轴222可转动地设置于安装件25,转盘的外周间隔设置有多个货物抓手21,多个货物抓手21围绕第一转轴222设置。
46.为了在传送并交接货物200的过程中保持货物200的水平姿态防止货物200发生摇晃,在本公开的一种实施方式中,如图5所示,交接组件20还包括姿态保持组件30。货物抓手21通过姿态保持组件30与转运件22连接,以使货物抓手21跟随转运件22的转动而运动时能够保持预设姿态。
47.当转运件22相对于安装件25发生转动时,若不设置姿态保持组件30货物抓手21上抓取的货物200会跟随转运件22发生转动,使得货物200发生摇晃,可能会损坏货物200。而
通过设置姿态保持组件30,姿态保持组件30能够跟随转运件22的转动而做出相应的运动,使得与转运件22连接的货物抓手21始终能够保持预设状态,如水平状态,进而使得货物抓手21上的货物200始终能够保持在预设状态,不会由于转运件22的转动而发生摇晃或颠倒,因此,通过该货物传送机构100能够平稳地运输货物200。
48.在本公开的一种实施方式中,如图4和图5所示,转运件22通过第一转轴222可转动地设置在安装件25上。转运件22具有两个所述活动端2211以分别设置货物抓手21。姿态保持组件30包括齿轮组件和与两个货物抓手21一一对应的两组同步带组件34。齿轮组件包括主动齿轮33以及位于主动齿轮33两侧并且分别与主动齿轮33啮合的第一从动齿轮31、第二从动齿轮32。主动齿轮33和转运件22分别周向锁止地间隔套设于第一转轴222。第一转轴222周向锁止的穿设于转运件22。同步带组件34包括第二转轴341、第三转轴342、第一带轮343、第二带轮344以及套设在第一带轮343和第二带轮344上的扰性带345。第一带轮343周向锁止地套设于第二转轴341,第二转轴341可转动地穿设于转运件22,第三转轴342周向锁止地穿设于第二带轮344,并且第三转轴342可转动地穿设于转运件22并且与货物抓手21传动连接。两组同步带组件34分别位于主动齿轮33的两侧,其中一组同步带组件34中的第二转轴341周向锁止地穿设于第一从动齿轮31,另一组同步带组件34中的第二转轴341周向锁止地穿设于第二从动齿轮32。同步带组件34和齿轮组件的传动比均为1。
49.扰性带345可为平带或v带等,本公开对此不作限制。
50.在本公开中对于如何驱动主动齿轮33转动不作限制,如图4所示,在一种实施方式中,第一驱动装置27包括传动带组件和电机,传动带组件中的其中一个带轮与主动齿轮33传动连接,电机与另一个带轮传动连接,从而通过电机驱动传动带组件运动,进而带动主动齿轮33转动。在其他实施方式中,第一驱动装置27可包括传动齿轮组和电机,电机通过传动齿轮组与主动齿轮33传动连接,从而带动主动齿轮33转动,进而带动转运件22转动。
51.当需要转动转运件22时,通过驱动装置驱动主动齿轮33向第一方向转动,进而通过第一转轴222带动转运件22向第一方向转动,与此同时带动与第一主动齿轮33相啮合的第一从动齿轮31、第二从动齿轮32向第二方向转动,第一方向和第二方向方向相反。第一从动齿轮31带动其中一组同步带组件34运动,第二从动齿轮32带动另一组同步带组件34运动。以第一从动齿轮31带动的这一组同步带组件34为例进行说明。第一从动齿轮31运动时带动第二转轴341转动向第二方向转动,第二转轴341带动第一带轮343转动向第二方向转动,第一带轮343通过扰性带345带动第二带轮344向第二方向转动,第二带轮344带动第三转轴342向第二方向转动,第三转轴342带动货物抓手21向第二方向转动。而且,由于同步带组件34和齿轮组件的传动比均为1,使得转运件22在向第一方向转动第一角度时,货物抓手21也能够同步向第二方向转动第一角度,从而始终保持预设姿态,如水平姿态,从而能够平稳的运输货物200。
52.在其他实施方式中,货物抓手21可转动地设置在转动件上,姿态保持组件30还可包括用于驱动转动件转动的第一电机、用于驱动货物抓手21转动的第二电机、以及分别与第一电机和第二电机电连接的姿态保持控制器。当第一电机驱动转动件顺时针转动第一角度时,并将该信号传递至控制器,控制器控制第二电机驱动货物抓手21逆时针转动第一角度,如此便能够使货物抓手21始终保持预设状态,如水平状态。
53.在本公开中对货物抓手21具体如何运输货物200不作限制,在本公开的一种实施
方式中,如图6所示,货物抓手21包括吸盘211、压缩机212和安装座213。压缩机212用于驱动吸盘211吸附或释放货物200,安装座213的一侧设置有吸盘211,另一侧设置有压缩机212,吸盘211与压缩机212连通。安装座213与姿态保持组件30传动连接。具体地,第三转轴342可转动地穿过转运件22并且与安装座213传动连接,进一步地,第三转轴342周向锁止地穿设于安装座213上的通孔,从而使得转运件22在转动时,通过齿轮组件和同步带组件34带动第三转轴342转动,进而带动货物抓手21转动,使得货物抓手21保持预设姿态。
54.可选地,如图6所示,安装座213包括构造成l型结构的第一部和第二部,第一部上开设有穿设孔,第三转轴342周向锁止地穿设于该穿设孔,第二部的一侧固定设置有多个吸盘211,另一侧固定有压缩机212,吸盘211与压缩机212连通。
55.为了方便从不同方向抓取货物200,在本公开的一种实施方式中,如图1和图3所示,同一转运件22具有两个活动端2211以分别设置有货物抓手21,位于同一转运件22上的不同的货物抓手21的吸盘211的朝向相反。两个货物抓手21上的吸盘211同时朝向导向组件10设置或背离导向组件10设置,从而能够方便从货物200的不同侧面吸附货物200。
56.当建筑物上沿货物传送路径依次布置有多个导向组件10时,每个导向组件10上设置有对应的交接组件20。当相邻的两个导向组件10之间需要交接货物200时,如图3所示,相邻的两个导向组件10上的交接组件20之间相互靠近,并且转动转动件,带动相邻的两个交接组件20上的货物抓手21相互靠近,使得两个货物抓手21恰好分别位于货物200的两侧,位于传送路径下游的货物抓手21抓取货物200,位于传动路径上游的货物抓手21释放货物200,从而完成货物200交接。
57.为了便于对交接组件20进行导向,在本公开的一种实施方式中,如图1、图2和图7所示,导向组件10包括用于固定于基础上的固定柱12。固定柱12沿传送路径布置。固定柱12的两侧均固定设置有导向件11,导向件11上开设有沿导向组件10长度方向延伸的滑槽111。安装件25包括连接件251和与滑槽111一一对应的两个滑动件252,转运件22可转动地设置于连接件251,连接件251横跨固定柱12,并且连接件251的两端分别通过滑动件252与滑槽111滑动配合。该滑动配合即可以是通过滑块在滑槽111内滑动,也可以是通过滚轮2521在滑槽111内滚动。具体地,如图4和图7所示,安装件25大致呈门型结构,两个滑动件252相对设置,连接件251连接在两个滑动件252之间。滑动件252包括滚轮2521和支撑板2522,支撑板2522与连接件251固定连接,支撑板2522沿导向组件10长度方向的两端均设置有滚轮2521,滚轮2521可转动地设置在滑槽111内。通过如此设置滑动件252与滑槽111滑动配合,从而保证交接组件20能够平稳地沿导向件11移动。
58.在本公开中对于如何将导向组件10固定在建筑物等基础上不作限制,在一种实施方式中,如图1和图2所示,导向组件10还包括与固定柱12固定连接的固定件13,固定件13设置于固定柱12的背离安装件25的一侧,固定件13上开设有用于与基础连接的连接孔,固定件13的数量为多个,并且沿固定柱12的长度方向间隔设置。通过螺栓等穿过连接孔即可将导向组件10固定在建筑物上。
59.为了能够驱动交接组件20运动,在本公开的一种实施方式中,如图1、图2和图7所示,货物传送机构100还包括用于驱动安装件25沿导向组件10移动的第二驱动装置40。第二驱动装置40包括驱动电机41、主动带轮42、从动带轮43以及套设于主动带轮42和从动带轮43的同步带44。主动带轮42和从动带轮43分别可转动地设置于固定柱12的两端,驱动电机
41用于驱动主动带轮42转动,安装件25的一端与同步带44传动连接。具体地,安装件25还包括压板26,压板26与连接件251相对设置,同步带44的一段夹设在压板26与连接件251之间。因此,第二驱动装置40启动时,能够通过同步带44带动安装件25相对于导向组件10移动,即带动整个交接组件20相对于导向组件10移动。
60.在本公开中对于如何驱动交接组件20相对于导向组件10移动不作限制,在其他实施方式中,还可通过直线电机等驱动交接组件20沿导向组件10移动,或,通过齿条和齿轮的配合,齿条沿导向组件10延伸,通过电机带动齿轮转动,齿轮的中心轴可转动地与安装件25连接,从而在齿轮沿齿条移动时,带动安装件25移动。
61.根据本公开的另一方面,还提供了一种无人机的货物传送系统,其包括无人机货物中转机构、储存组件和上述的货物传送机构100。该无人机货物中转机构用于与无人机之间交接货物200。储存组件用于容纳货物200并且固定在基础上。货物传送机构100布置在无人机货物中转机构和储存组件之间,从而在无人机货物中转机构和储存组件之间传送货物200。
62.其中基础可以是建筑物,还可以是山坡上的两个地点之间,或者,不便于物流小车行驶的不同的住户之间,本公开对此不作限制。
63.在本公开的另一方面,还提供了一种建筑物,该建筑物包括建筑物主体和安装在该建筑物主体上的上述的货物传送系统。
64.可选地,无人机货物中转机构可设置在建筑物的楼顶上。储存组件包括储存箱,储存箱可固定在阳台或窗户等能够与建筑物连通的地方。将货物200从无人机运输至住户的储存箱的工作流程大致如下。
65.无人机的货物200通过无人机货物中转机构转交给货物传送机构100,交接组件20沿导向组件10移动,并控制安装件25转动,将货物200从无人机货物中转机构中取出,交接组件20沿导向组件10移动以运输货物200,当需要途径多个导向组件10时,相邻的导向组件10上的交接组件20通过转动转运件22来交接货物200,直到交接组件20移动到相应楼层,转动转运件22并通过货物抓手21将货物200最终配送至住户的储存箱中,从而完成货物200配送。将货物200从住户的储存箱运输至无人机的流程与上述工作流程相反,不再赘述。
66.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
67.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
68.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。