1.本实用新型涉及飞行器领域,具体涉及一种倾转螺旋桨无人机。
背景技术:
2.近年来,无人机在军事科研及民用领域都已呈现爆发式增长,尤其是多旋翼无人机在消费市场更是一骑绝尘。多旋翼无人机有垂直起降的优点,但也有载重小和速度慢的缺点;而固定翼无人机虽然速度快、载重大,但也有不可垂直起降,起降要求较高,无法适应复杂地形的缺点。
3.因此有必要研发一种能够垂直起降且具备速度快、载重大性能的倾转螺旋桨无人机。
技术实现要素:
4.本实用新型的目的是提供一种倾转螺旋桨无人机,该倾转螺旋桨无人机能够垂直起降且具备速度快、载重大。
5.为了实现上述目的,根据本实用新型提供了一种倾转螺旋桨无人机,该倾转螺旋桨无人机包括:机身、主翼、主翼螺旋桨推力单元、螺旋桨倾转机构和机尾螺旋桨推力单元;
6.其中,所述主翼设置在所述机身的两侧,所述螺旋桨倾转机构连接于所述主翼,所述主翼螺旋桨推力单元连接于所述螺旋桨倾转机构,所述机尾螺旋桨推力单元连接于所述机身位于所述机身的尾部;
7.其中,所述螺旋桨倾转机构包括壳体、驱动件、第一摆臂、连杆、第二摆臂,所述主翼螺旋桨推力单元铰接于所述壳体,所述驱动件连接于所述第一摆臂的一端,所述第一摆臂的另一端铰接于所述连杆的一端,所述连杆的另一端铰接于所述第二摆臂,所述第二摆臂连接于所述主翼螺旋桨推力单元。
8.优选地,所述主翼螺旋桨推力单元和所述螺旋桨倾转机构为两个,每个所述主翼上连接有一个所述螺旋桨倾转机构,每个所述螺旋桨倾转机构上设置有一个所述主翼螺旋桨推力单元。
9.优选地,两个所述主翼螺旋桨推力单元包括正反浆,两个所述主翼螺旋桨推力单元的电机转向相反。
10.优选地,所述机尾螺旋桨推力单元为两个,两个所述机尾螺旋桨推力单元分别位于所述机身的顶部和底部。
11.优选地,两个所述机尾螺旋桨推力单元包括正反浆,两个所述机尾螺旋桨推力单元的电机转向相同。
12.优选地,所述驱动件为航模舵机。
13.有益效果:本技术提供的倾转螺旋桨无人机通过机身、主翼、主翼螺旋桨推力单元、螺旋桨倾转机构和机尾螺旋桨推力单元的设置,在起降过程中,可通过螺旋桨倾转机构控制主翼螺旋桨推力单元转为垂直于机身的状态,同时开启机尾螺旋桨推力单元即可带动
倾转螺旋桨无人机垂直起降;在倾转螺旋桨无人机飞行过程中,可通过螺旋桨倾转机构控制主翼螺旋桨推力单元转为水平状态,同时关闭机尾螺旋桨推力单元即可实现倾转螺旋桨无人机的平稳飞行,进一步地倾转螺旋桨无人机通过主翼的设置,使得倾转螺旋桨无人机呈固定翼无人机,因此倾转螺旋桨无人机具备速度快、载重大的优点。
附图说明
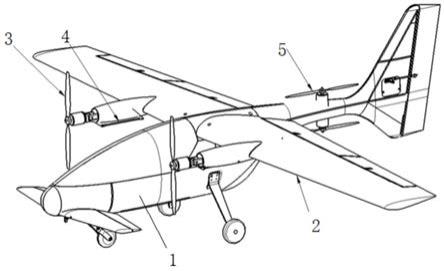
14.图1是本实用新型倾转螺旋桨无人机的实施例的结构示意图。
15.图2是本实用新型螺旋桨倾转机构的实施例的结构示意图。
16.附图标记说明:
17.1机身;2主翼;3主翼螺旋桨推力单元;4螺旋桨倾转机构;5机尾螺旋桨推力单元;6壳体;7第一摆臂;8连杆;9第二摆臂。
具体实施方式
18.下面结合附图详细介绍本实用新型技术方案。
19.根据本实用新型的一方面提供了一种倾转螺旋桨无人机,该倾转螺旋桨无人机包括:机身、主翼、主翼螺旋桨推力单元、螺旋桨倾转机构和机尾螺旋桨推力单元;
20.其中,所述主翼设置在所述机身的两侧,所述螺旋桨倾转机构连接于所述主翼,所述主翼螺旋桨推力单元连接于所述螺旋桨倾转机构,所述机尾螺旋桨推力单元连接于所述机身位于所述机身的尾部;
21.其中,所述螺旋桨倾转机构包括壳体、驱动件、第一摆臂、连杆、第二摆臂,所述主翼螺旋桨推力单元铰接于所述壳体,所述驱动件连接于所述第一摆臂的一端,所述第一摆臂的另一端铰接于所述连杆的一端,所述连杆的另一端铰接于所述第二摆臂,所述第二摆臂连接于所述主翼螺旋桨推力单元。
22.本技术提供的倾转螺旋桨无人机通过机身、主翼、主翼螺旋桨推力单元、螺旋桨倾转机构和机尾螺旋桨推力单元的设置,在起降过程中,可通过螺旋桨倾转机构控制主翼螺旋桨推力单元转为垂直于机身的状态,同时开启机尾螺旋桨推力单元即可带动倾转螺旋桨无人机垂直起降;在倾转螺旋桨无人机飞行过程中,可通过螺旋桨倾转机构控制主翼螺旋桨推力单元转为水平状态,同时关闭机尾螺旋桨推力单元即可实现倾转螺旋桨无人机的平稳飞行,进一步地倾转螺旋桨无人机通过主翼的设置,使得倾转螺旋桨无人机呈固定翼无人机,因此倾转螺旋桨无人机具备速度快、载重大的优点。
23.进一步地,所述主翼螺旋桨推力单元和所述螺旋桨倾转机构为两个,每个所述主翼上连接有一个所述螺旋桨倾转机构,每个所述螺旋桨倾转机构上设置有一个所述主翼螺旋桨推力单元。
24.在该技术方案中,进一步提供了主翼螺旋桨推力单元和所述螺旋桨倾转机构的设置位置,通过两个主翼螺旋桨推力单元和所述螺旋桨倾转机构的设置,能够使倾转螺旋桨无人机的飞行和起落更为平稳。
25.进一步地,两个所述主翼螺旋桨推力单元包括正反浆,两个所述主翼螺旋桨推力单元的电机转向相反。
26.在该技术方案中,进一步提供了两个主翼螺旋桨推力单元的样式和驱动方向,能
够更进一步地使倾转螺旋桨无人机的飞行和起落更为平稳。
27.进一步地,所述机尾螺旋桨推力单元为两个,两个所述机尾螺旋桨推力单元分别位于所述机身的顶部和底部。
28.在该技术方案中,进一步提供了机尾螺旋桨推力单元的设置数量和位置,通过两个机尾螺旋桨推力单元的设置,在倾转螺旋桨无人机起落过程中能够提供足够的辅助推力。
29.进一步地,两个所述机尾螺旋桨推力单元包括正反浆,两个所述机尾螺旋桨推力单元的电机转向相同。
30.在该技术方案中,进一步提供了机尾螺旋桨推力单元的样式和驱动方式,如此设置能够保障在倾转螺旋桨无人机起落过程中机尾螺旋桨推力单元能够提供平稳的推力。
31.进一步地,所述驱动件为航模舵机。
32.在该技术方案中,进一步提供了驱动件的样式,通过航模舵机能够准确控制主翼螺旋桨推力单元的朝向,使得倾转螺旋桨无人机可操控性更强。
33.实施例1
34.图1是本实用新型倾转螺旋桨无人机的实施例的结构示意图。图2是本实用新型螺旋桨倾转机构的实施例的结构示意图。
35.如图1和图2,该倾转螺旋桨无人机包括:机身1、主翼2、主翼螺旋桨推力单元3、螺旋桨倾转机构4和机尾螺旋桨推力单元5;
36.其中,所述主翼2设置在所述机身1的两侧,所述螺旋桨倾转机构4连接于所述主翼2,所述主翼螺旋桨推力单元3连接于所述螺旋桨倾转机构4,所述机尾螺旋桨推力单元5连接于所述机身1位于所述机身1的尾部;
37.其中,所述螺旋桨倾转机构4包括壳体6、驱动件、第一摆臂7、连杆8、第二摆臂9,所述主翼螺旋桨推力单元3铰接于所述壳体6,所述驱动件连接于所述第一摆臂7的一端,所述第一摆臂7的另一端铰接于所述连杆8的一端,所述连杆8的另一端铰接于所述第二摆臂9,所述第二摆臂9连接于所述主翼螺旋桨推力单元3。
38.其中,所述主翼螺旋桨推力单元3和所述螺旋桨倾转机构4为两个,每个所述主翼2上连接有一个所述螺旋桨倾转机构4,每个所述螺旋桨倾转机构4上设置有一个所述主翼螺旋桨推力单元3。
39.其中,两个所述主翼螺旋桨推力单元3包括正反浆,两个所述主翼螺旋桨推力单元3的电机转向相反。
40.其中,所述机尾螺旋桨推力单元5为两个,两个所述机尾螺旋桨推力单元5分别位于所述机身1的顶部和底部。
41.其中,两个所述机尾螺旋桨推力单元5包括正反浆,两个所述机尾螺旋桨推力单元5的电机转向相同。
42.其中,所述驱动件为航模舵机。
43.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均
应包含在本实用新型的保护范围之内。