1.本发明涉及航天器中电推力器调节推力方向的机构,特别涉及一种正交双关节式电推力器指向机构。
背景技术:
2.目前,在国内外,不论是航天器在轨运行的位置保持,还是航天器的轨道变更都需要推进器的推力作用。电推进相对于化学推进具有高比冲、扰动小、质量小等优点,所以现阶段,采用电推进技术控制在轨卫星的运行是良好的方法。如何有效,精准地控制推进力的方向是需要研究的重要问题,这就要求有一种电推进指向机构来控制推进力的方向。现在使用的电推进器大多体积大,重量大,在航空航天领域难以满足小体积、轻量化的要求;同时不能精准地完成方向控制任务,以及有更大的转动角度。因此,急需一种体积小,重量轻,转动角度大,工作可靠的电推进指向机构。
技术实现要素:
3.针对上述问题,本发明的目的在于提供一种正交双关节式电推力器指向机构,以克服现有的电推进指向机构中存在的体积较大,重量较重等问题。
4.为了实现上述目的,本发明采用以下技术方案:一种正交双关节式电推力器指向机构,包括旋转执行器ⅰ、万向节环、电推力器、上旋转架、下固定架及旋转执行器ⅱ,其中万向节环饶y轴转动地安装在下固定架上,旋转执行器ⅱ设置于下固定架上,且旋转执行器ⅱ的输出端与万向节环连接,旋转执行器ⅱ用于驱动万向节环饶y轴转动;上旋转架绕x轴转动地与万向节环连接,旋转执行器ⅰ设置于上旋转架上,且旋转执行器ⅰ的输出端与万向节环连接,旋转执行器ⅰ用于驱动上旋转架绕x轴转动;电推力器设置于上旋转架上。
5.所述旋转执行器ⅰ和所述旋转执行器ⅱ结构相同,均包括依次连接的电机、减速器及输出轴转盘;所述万向节环的侧壁上间隔90
°
设有两个万向节环连接端口,两个万向节环连接端口分别与所述旋转执行器ⅰ和所述旋转执行器ⅱ的输出轴转盘连接。
6.所述输出轴转盘与所述万向节环连接端口之间设有中空的连接块,所述万向节环连接端口、连接块及输出轴转盘通过内六角螺栓连接。
7.所述万向节环的侧壁上设有两个外转动关节模块,两个外转动关节模块分别与所述旋转执行器ⅰ和所述旋转执行器ⅱ相对设置。
8.所述外转动关节模块包括转动轴、深沟球轴承及轴承端盖,其中转动轴的一端与所述万向节环的侧壁连接,另一端通过深沟球轴承与所述下固定架或所述上旋转架连接,所述深沟球轴承的外侧通过轴承端盖轴向限位。
9.两个所述外转动关节模块上均设有角度传感器。
10.所述上旋转架和所述下固定架之间设有螺旋管道。
11.所述上旋转架和所述下固定架均包括底板及设置于底板上的两个三角支撑架,两个三角支撑架与所述万向节环转动连接。
12.所述的正交双关节式电推力器指向机构还包括锁紧固定模块,所述下固定架上设有连接支架,所述连接支架上设有连接支架固定端;所述上旋转架上设有与连接支架固定端相对应的上旋转架固定端,所述锁紧固定模块用于锁定所述上旋转架固定端和所述连接支架固定端。
13.所述锁紧固定模块包括双螺母、限位挡圈、弹簧、螺柱及分瓣螺母,其中螺柱连接所述上旋转架固定端和所述连接支架固定端,且上端设有弹簧、限位挡圈及双螺母,下端通过分瓣螺母锁紧。
14.本发明的优点及有益效果是:本发明通过使用一个万向节环达到调节上支架转动的目的,可以实现机构的上旋转架在行程范围内任意方位的指向。
15.本发明通过合理的控制上旋转架和下固定架的尺寸,充分考虑电机和其它部分的干涉,可以使机构转动角度尽可能的大,现已能达到x轴和y轴方向至少
±
30
°
的转动角度。
16.本发明采用万向节结构,中间位置敞开,给电推力器的散热以及物质输送管道提供空间。
17.本发明采用并排螺旋管道的方式,在机构运动时用于物料输送以及位置方向的柔性适应。
18.本发明考虑了发射时,中间管道震动和结构摇摆可能带来的问题,将发射时的管道姿态和机构姿态固定,通过锁紧固定模块固定上旋转架和连接支架,机构升空后工作时,控制分瓣螺母打开,使机构正常工作。
19.本发明在外转动关节模块处安装有角度传感器,可监测和控制旋转的角度和精度。
附图说明
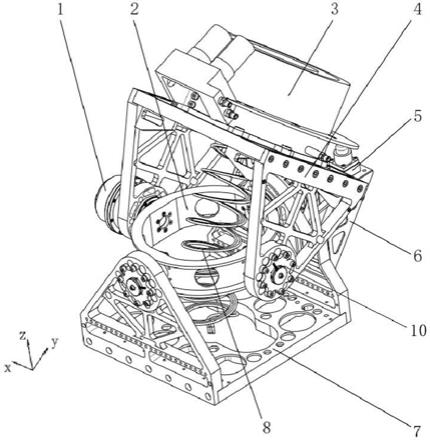
20.图1为本发明一种正交双关节式电推力器指向机构的结构示意图之一;图2为本发明一种正交双关节式电推力器指向机构的结构示意图之二;图3为本发明一种正交双关节式电推力器指向机构的剖视图;图4为图3中a处放大图;图5为图3中b处放大图;图6 为本发明中锁紧固定模块的结构示意图;图中:1为旋转执行器ⅰ,2为万向节环,3为电推力器,4为上旋转架,5为锁紧固定模块,6为连接支架,7为下固定架,8为螺旋管道,9为旋转执行器ⅱ,10为外转动关节模块,11为电机,12为减速器,13为万向节环连接端口,14为内六角螺栓,15为连接块,16为输出轴转盘,17为转动轴,19为深沟球轴承,20为角度传感器,21传感器压环,22为轴承端盖,23为固定挡盖,24为双螺母,25为限位挡圈,26为弹簧,27为上旋转架固定端,28为连接支架固定端,29为螺柱,30为分瓣螺母。
具体实施方式
21.为了使本发明的目的、技术方案和优点更加清楚,下面结合附图和具体实施例对本发明进行详细描述。
22.如图1-3所示,本发明提供的一种正交双关节式电推力器指向机构,包括旋转执行器ⅰ1、万向节环2、电推力器3、上旋转架4、下固定架7及旋转执行器ⅱ9,其中万向节环2饶y轴转动地安装在下固定架7上,旋转执行器ⅱ9设置于下固定架7上,且旋转执行器ⅱ9的输出端与万向节环2连接,旋转执行器ⅱ9用于驱动万向节环2饶y轴转动;上旋转架4绕x轴转动地与万向节环2连接,旋转执行器ⅰ1设置于上旋转架4上,且旋转执行器ⅰ1的输出端与万向节环2连接,旋转执行器ⅰ1用于驱动上旋转架4绕x轴转动;电推力器3设置于上旋转架4上。
23.本发明的实施例中,上旋转架4和下固定架7之间设有螺旋管道8。上旋转架4和下固定架7均包括底板及设置于底板上的两个三角支撑架,两个三角支撑架与万向节环2转动连接。
24.如图4所示,本发明的实施例中,旋转执行器ⅰ1和旋转执行器ⅱ9结构相同,均包括依次连接的电机11、减速器12及输出轴转盘16;万向节环2的侧壁上间隔90
°
设有两个万向节环连接端口13,两个万向节环连接端口13分别与旋转执行器ⅰ1和旋转执行器ⅱ9的输出轴转盘16连接。
25.进一步地,输出轴转盘16与万向节环连接端口13之间设有中空的连接块15,万向节环连接端口13、连接块15及输出轴转盘16通过内六角螺栓14连接。
26.进一步地,万向节环2的侧壁上设有两个外转动关节模块10,两个外转动关节模块10分别与旋转执行器ⅰ1和旋转执行器ⅱ9相对设置。
27.如图5所示,本发明的实施例中,外转动关节模块10包括转动轴17、深沟球轴承19及轴承端盖22,其中转动轴17的一端与万向节环2的侧壁连接,另一端通过深沟球轴承19与下固定架7或上旋转架4连接,深沟球轴承19的外侧通过轴承端盖22轴向限位和密封。
28.具体地,与旋转执行器ⅰ1相对设置的外转动关节模块10中,转动轴17的另一端通过深沟球轴承19与上旋转架4连接;与旋转执行器ⅱ9相对设置的外转动关节模块10中,转动轴17的另一端通过深沟球轴承19与下固定架7连接。
29.进一步地,两个外转动关节模块10的转动轴17上均设有角度传感器20,角度传感器20通过传感器压环21轴向限位,角度传感器20可监测和控制上旋转架4的旋转角度和精度。
30.在上述实施例的基础上,如图1-2所示,正交双关节式电推力器指向机构还包括锁紧固定模块5,下固定架7上设有连接支架6,连接支架6上设有连接支架固定端28;上旋转架4上设有与连接支架固定端28相对应的上旋转架固定端27,锁紧固定模块5用于锁定上旋转架固定端27和连接支架固定端28。
31.如图6所示,本发明的实施例中,锁紧固定模块5包括双螺母24、限位挡圈25、弹簧26、螺柱29及分瓣螺母30,其中螺柱29连接上旋转架固定端27和连接支架固定端28,且上端设有弹簧26、限位挡圈25及双螺母24,下端通过分瓣螺母30锁紧。进一步地,螺柱29的端部外侧设有固定挡盖23。
32.绕y轴旋转工作时,与下固定架7连接的旋转执行器ⅱ9的输出轴旋转带动万向节
环2绕y轴旋转,连接在万向节环2的上旋转架4也跟随同步旋转。绕x轴旋转工作时,与上旋转架4连接的旋转执行器ⅰ1的输出轴旋转带动上旋转架4沿x轴旋转。
33.本发明的实施例中,连接支架6是固定在下固定架7的一个机构,分瓣螺母30固定在连接支架6上。发射时,通过锁紧固定模块5将上旋转架4的上旋转架固定端27与连接支架6的连接支架固定端28固定;升空工作时,分瓣螺母30打开,通过双螺母24锁紧可使锁紧双螺母24、限位挡圈25、螺柱29成为一个整体,在弹簧26的作用下,双螺母24、限位挡圈25、螺柱29整体被弹升上去,并且不会再次掉落下来,实现上旋转架4与连接支架6的永久分离。此时,上旋转架4可开始工作。螺旋管道8的作用是负责工作介质的输送,在航天器发射过程中,会存在剧烈的震动,如不将管道固定,会对管道产生巨大的影响,所以发射时将上旋转架4与连接支架6固定,可以有效避免震动对螺旋管道8的影响。上旋转架4和连接支架6的固定,采用锁紧固定模块5能有效地起到固定的作用。
34.本发明提供的一种正交双关节式电推力器指向机构,体积小,重量轻,而且使用了正交双关节式旋转机构,转动角度大,且能保证良好的精度;加装锁紧固定模块,防止装置升空过程中,震动对机构关键部位产生影响。本发明首次将万向节结构应用于电推进领域,不但满足了航空航天领域对体积和质量的要求,而且提高了转动角度的范围。
35.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。