1.本实用新型涉及飞行器机械对接技术领域,具体涉及一种机械回旋辅助型电磁铁连接机构。
背景技术:
2.在无人机对接结构的研究方面,西北工业大学提出了一种模块化无人机机身对接结构(cn201911127074.0),该对接结构由机身对接面前端模块、对接面后端模块和对接面组成,通过机身对接面前端模块和对接面后端模块的接触面上楔形变深度凹槽结构和对应的楔形变深度凸块结构相互咬合,传递机体弯矩、扭矩和剪切力。其中,楔形凸块结构最高的一边从楔形凹槽结构深度为0的一边插入楔形凹槽结构,使连接件安装位置自动对准,逐步插入相互咬合,可快速进行连接。
3.北京航空航天大学设计了一种航天器电磁十字回旋对接锁紧装置(cn109264034a),该装置拟应用于空间航天器等重型航天器,具备一定的对接强度。
4.综上,虽然目前国内外有很多对接机构设计方案,但多以爪形、杆锥形纯机械对接居多,而电磁铁5吸引对接多应用于重型航天器,很少在小型飞行器中有所体现。同时,虽然现有技术中较好地实现了对接后机体弯矩、扭矩和剪切力的传递,但是在利用电磁铁5完成无人机的空中自动控制对接过程中,若电磁铁5突发断电,无人机无法保持连接状态,便会产生事故。针对以上问题和缺陷,有必要设计一种机械回旋辅助型电磁铁连接机构。
技术实现要素:
5.有鉴于此,本实用新型提供了一种机械回旋辅助型电磁铁连接机构,在对接之前设置了机械锁定,以此来增强对接机构的对接可靠性和稳定性,从而有效应用于小型飞行器的设计上。
6.本实用新型的技术方案为:一种机械回旋辅助型电磁铁连接机构,所述连接机构由对接组件ⅰ和对接组件ⅱ组成,二者对接时轴向孔轴配合,并通过对接组件ⅱ中的电磁铁与对接组件ⅰ中的杆形结构吸合连接,周向通过机械回旋将二者卡扣锁紧;其中,杆形结构采用磁性材料。
7.优选地,所述杆形结构为刚性杆。
8.优选地,所述对接组件ⅱ包括:锥形套筒和机械锁定锥套,所述机械锁定锥套为两端开口的圆柱形筒体,其一端内壁面沿周向设有两个以上弧形凸起,所述锥形套筒为漏斗状,其小端从机械锁定锥套设有弧形凸起的一端插入,机械锁定锥套内壁面上的弧形凸起对锥形套筒的大端限位,电磁铁固定在锥形套筒的小端内壁面上。
9.优选地,所述机械锁定锥套内壁面沿周向均匀设置四个弧形凸起。
10.优选地,所述对接组件ⅰ包括:电机和机械锁定杆套;所述电机的输出轴与杆形结构固接,且机械锁定杆套套装在杆形结构之外;其中,机械锁定杆套与机械锁定锥套的对接端的端部设有两个以上l型凸出结构,其与机械锁定锥套内壁面上的弧形凸起能够对应卡
合,且所有l型凸出结构的竖直段固定在机械锁定杆套端部,水平段呈弧形并位于同一圆周上。
11.优选地,所述对接组件ⅰ还包括:传动齿轮ⅰ和传动齿轮ⅱ,所述电机的输出轴同轴固定在传动齿轮ⅰ的端部,传动齿轮ⅰ和传动齿轮ⅱ啮合,传动齿轮ⅱ一端同轴固定有机械锁定杆套和杆形结构。
12.优选地,所述机械锁定锥套设有弧形凸起的相对端固定在被动对接无人机上,所述传动齿轮ⅱ设置杆形结构的相对端通过轴承与主动对接无人机上的连接轴相连。
13.优选地,所述机械锁定杆套和杆形结构均与电机异侧布置。
14.优选地,采用舵机替换所述电机。
15.有益效果:
16.1、本实用新型提供的电磁铁连接机构通过轴向孔轴配合后电磁铁吸合,及周向机械回转后卡扣配合,能够实现稳定连接;结构简单、使用时可靠性较强;对接机构体积小、重量轻,适合运用于微小型无人机。
17.2、本实用新型中对接组件ⅰ所使用的杆形结构为刚性杆的设计,具有可靠的传动功能。
18.3、本实用新型中述对接组件ⅱ的具体设置,既有利于为对接组件ⅰ与其对接导向,又能够有效将杆形组件与其通过电磁铁吸合,相比于完全依赖机械方式对接的机构,该对接机构设计能通过电磁铁通断电来控制对接的进行,提高了装置的可控性;且电磁铁对接的基础上加上轴向和周向的机械锁定,提高了连接机构对接的稳定性;同时,对接组件ⅱ的设计扩大了对接引导范围,提高无人机在利用该连接机构对接时的成功率。
19.4、本实用新型中对接组件ⅰ的具体结构设计,既有利于与对接组件ⅱ可靠对接,又能够通过自身携带的电机自驱动实现机械回转,从而能够实现卡扣锁紧,便于稳定连接;同时,机械锁定杆套的结构设计,便于在机械回转后与机械锁定锥套配合,实现可靠的锁紧。
20.5、本实用新型中对接组件ⅰ通过增设两个传动齿轮,能够有效传递电机输出力矩。
21.6、本实用新型中对接组件ⅰ和对接组件ⅱ分别与两个无人机的连接,能够避免电机驱动可能引起的运动干涉。
22.7、本实用新型中将电机驱动替换为舵机驱动,能够进一步提高控制精度。
附图说明
23.图1为本实用新型提出的电磁铁连接机构的结构示意图。
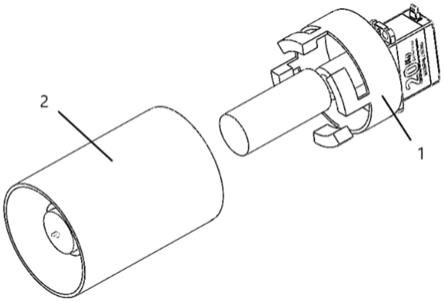
24.图2为本实用新型提出的电磁铁连接机构的局部爆炸图。
25.图3为本实用新型提出的电磁铁连接机构中锥形对接机构的结构示意图。
26.图4为本实用新型提出的电磁铁连接机构中锥形对接机构的爆炸图。
27.图5为本实用新型提出的电磁铁连接机构中机械锁定锥套4的示意图。
28.图6为本实用新型提出的电磁铁连接机构中杆形对接机构的结构示意图。
29.图7为本实用新型提出的电磁铁连接机构中机械锁定杆套的示意图。
30.图8为本实用新型提出的电磁铁连接机构中杆形结构的示意图。
31.其中,1
‑
对接组件ⅰ,2
‑
对接组件ⅱ,3
‑
锥形套筒,4
‑
机械锁定锥套,5
‑
电磁铁,6
‑
电机,7
‑
传动齿轮ⅰ,8
‑
传动齿轮ⅱ,9
‑
机械锁定杆套,10
‑
杆形结构。
具体实施方式
32.下面结合附图并举实施例,对本实用新型进行详细描述。
33.实施例1:
34.本实施例提供了一种机械回旋辅助型电磁铁连接机构,在对接之前设置了机械锁定,以此来增强对接机构的对接可靠性和稳定性,从而有效应用于小型飞行器的设计上。
35.如图1和2所示,该电磁铁连接机构由对接组件ⅰ1和对接组件ⅱ2组成,二者分别安装在主动对接无人机和被动对接无人机上,二者对接时轴向孔轴配合、周向卡扣锁紧;
36.如图3和4所示,对接组件ⅱ2由锥形套筒3、机械锁定锥套4和电磁铁5构成,所述机械锁定锥套4为两端开口的圆柱形筒体,其一端内壁面沿周向设有两个以上弧形凸起(如图5所示,优选沿周向均匀设置四个弧形凸起),所述锥形套筒3为漏斗状,其小端从机械锁定锥套4设有弧形凸起的一端插入,机械锁定锥套4内壁面上的弧形凸起对锥形套筒3的大端限位,电磁铁5固定在锥形套筒3的小端内壁面上;
37.如图6所示,对接组件ⅰ1由电机6、传动齿轮ⅰ7、传动齿轮ⅱ8、机械锁定杆套9、杆形结构10(杆形结构10的材料为磁性材料)构成;所述电机6的输出轴同轴固定在传动齿轮ⅰ7的端部,传动齿轮ⅰ7和传动齿轮ⅱ8啮合,传动齿轮ⅱ8一端同轴固定有机械锁定杆套9和杆形结构10,且机械锁定杆套9套装在杆形结构10之外;其中,机械锁定杆套9与机械锁定锥套4的对接端端部设有两个以上l型凸出结构,其与机械锁定锥套4内壁面上的弧形凸起能够对应卡合,且所有l型凸出结构的竖直段固定在机械锁定杆套9端部,水平段呈弧形并位于同一圆周上。
38.本实施例中,机械锁定杆套9和杆形结构10均与电机6异侧布置。
39.该电磁铁连接机构的工作原理为:所述对接组件ⅱ2中机械锁定锥套4的另一端固定在被动对接无人机上,对接组件ⅰ1中传动齿轮ⅱ8的另一端通过轴承与主动对接无人机上的连接轴相连;主、被动两无人机对接时,首先,对接组件ⅰ1中的杆形结构10在对接组件ⅱ2中锥形套筒3大端的导引下,同轴插入锥形套筒3小端,直至杆形结构10与电磁铁5吸引相接,机械锁定杆套9端部的l型凸出结构的水平段嵌入机械锁定锥套4内壁面相邻弧形凸起之间的空隙;然后对接组件ⅰ1上的电机6带动传动齿轮ⅰ7和传动齿轮ⅱ8转动,进而使机械锁定杆套9旋转,从而机械锁定杆套9端部的l型凸出结构的水平段搭接在机械锁定锥套4内壁面弧形凸起上,与机械锁定锥套4实现机械锁定。
40.实施例2:
41.与实施例1不同的是,本实施例使用舵机代替实施例1中的电机6,使机械锁定的角度控制更为便利。
42.实施例3:
43.与实施例1不同的是,本实施例不使用齿轮传动(即传动齿轮ⅰ7和传动齿轮ⅱ8),直接将电机6与杆形结构10固连,从而通过电机6直接驱动杆形结构10。
44.综上所述,以上仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。