1.本发明属于飞行器垂直起降动力装置,具体是一种凹轨控制旋转扑翼动力装置。
背景技术:
2.现有垂直起降飞行器投入实用的方案并不多,作为垂直起降飞行器的动力来源主要有以下几种,旋翼类、喷气类、扑翼类、旋翼类:由于结构比较简单,其发展也十分成熟运用比较广泛。同时也正是因为其结构比较简单发展历史也比较长,可挖掘的潜力已经十分有限,其工作面积巨大,叶片和周围物品要有较大安全距离等缺点依然毫无克制和改进的办法。喷气类;欧美和前苏联等国在上世纪进行大量基于此类技术的垂直起降飞行器的研制,现在基本已经停下开发的脚步了。此类技术天然存在的发动机喷射高温高压气流,对地面和周围物品的破坏极其严重,燃料消耗快转化效率低,噪音惊人等缺点也依旧没有好的改进优化方法,目前发展几乎处于停滞。扑翼类:我们所说的扑翼类是指往复扑翼类飞行器,主要是仿生学中鸟类和昆虫等飞行方式,他们的主要特点还是基于对动物的飞行特性进行模仿和拷贝。虽然扑翼类飞行器据估算有很高的效率,但是因其往复运动的工作原理,对材料有特别的轻量化要求,总结起来就是要求材料又轻盈又牢固。从发展情况看要实现扑翼机大型化可谓是困难重重,经过多年的发展演化目前都还是停留在无人飞行器和验证机的阶段,走向载人载物的道路依然十分漫长。
3.同时我们列举的这样垂直起降技术可以看到另外一个情况这些方案都无法做到高效垂直起降和长航程飞行两个性能的兼顾,而这两个性能是未来大规模使用垂直起降飞行器的基本条件。鉴于近年来新的高效垂直起降技术的发展遇到了十分突出的困难,甚至可以说在新原理的探索上出现了停滞的现象,现在特别需要有开创性的思路和方法提出。
技术实现要素:
4.为了解决目前垂直起降技术中,旋翼类工作面积巨大、安全性差、航程短的问题,解决涡喷类垂直起降方式效率低、航程短、能耗高、设施破坏严重等诸多缺点,本发明提供了一种凹轨控制旋转扑翼动力装置。
5.本发明的技术方案如下:
6.一种凹轨控制旋转扑翼动力装置,由支架、发动机、主轴、叶片、轨道环支架、叶片支架、叶片远端轴承、轨道环、叶片分配轮、主动摇臂、从动摇臂、活动拉杆、摇臂支架组成,其中,发动机固定在支架上,发动机转动轴和联轴器相连,联轴器、叶片支架、摇臂支架、叶片远端轴承分别固定安装在主轴上,轨道环固定在轨道环支架上,轨道环支架固定在支架上,主轴贯穿轨道环支架中心的孔,轨道环是凹槽形的,摇臂支架上设置有主动摇臂和从动摇臂,主动摇臂和从动摇臂通过活动拉杆相互连接,主动摇臂上有一个7字形突出部,7字形突出部上有一个凸出小轴,凸出小轴上设置有轴承,轴承位于轨道环的凹槽中,并可在轨道环中运动,主动摇臂和从动摇臂上分别安装有叶片分配轮,叶片一端固定安装在叶片分配轮上,另一端安装在叶片支架上。
7.所述摇臂支架、叶片支架是十字形的。
8.所述十字形的摇臂支架上的每条边上均设置有1个主动摇臂和2个从动摇臂,2个从动摇臂分别设置在主动摇臂的两侧。
9.所述轨道环是不规则环形轨道环,轨道环由上下两段圆弧形和两侧连接两段圆弧形的直线段组成,并且上部的圆弧形半径大于下部的圆弧形半径。
10.当发动机带动主轴转动工作时,摇臂支架转动运行,使主动摇臂上的凸出小轴上的轴承沿着轨道环的凹槽运动,轴承运动的同时,受到轨道环的形状控制,带动主动摇臂转动,主动摇臂通过活动拉杆带动从动摇臂转动,从而使主动摇臂和从动摇臂上的叶片分配轮同步转动,实现叶片的同步开合形成旋转扑翼。
11.本发明的凹轨控制旋转扑翼动力装置,通过凹轨道这一较为简单的结构,实现叶片的打开和闭合,同时在凹轨的控制下,还可以通过连杆机构将分组的小叶片进行组合连接,这样可以任意扩大叶片数,达到扩大和减小叶片面积的作用。分组叶片的优势在于把一个大叶片分成若干小叶片,在工作时自动分离组合的方式,大为减小叶片在开合过程中的旋转力臂,达到减小阻力的目的。本发明提出了可实现的高效垂直起降、可长航程飞行、对基础设备友好的全新垂直起降飞行器的解决方案,本发明可以为飞行汽车的真正实现带来技术上的可能性,为大量私人垂直起降飞行交通工具的出现做好了基础准备,开拓出了全新的垂直起降方法,使实现垂直起降的路径更加多元化。
附图说明
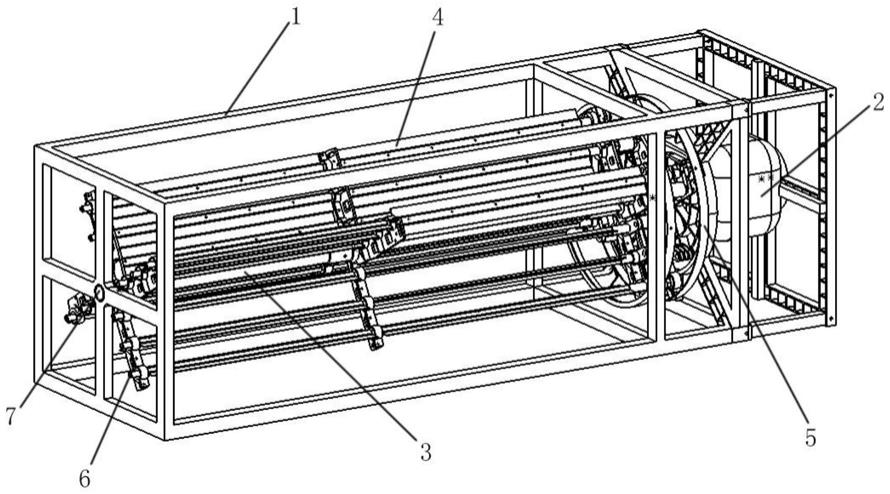
12.图1是本发明的整体结构示意图;
13.图2是本发明的内部部分结构示意图;
14.图3是本发明的轨道环结构示意图;
15.图4是本发明的第一种应用方式示意图;
16.图5是本发明的第二种应用方式示意图;
17.图6是本发明的第三种应用方式示意图;
18.图中,1—支架;2—发动机;3—主轴;4—叶片;5—轨道环支架;6—叶片支架;7—叶片远端轴承;8—轨道环;9—7字形突出部;10—轴承;11 —凸出小轴;12—叶片分配轮;13—主动摇臂;14—从动摇臂;15—活动拉杆;16—摇臂支架;17—凹轨控制旋转扑翼动力装置;18—飞行器。
具体实施方式
19.下面结合附图对本发明进行详细说明。
20.如图1至图3所示,本发明的一种凹轨控制旋转扑翼动力装置,由支架1、发动机2、主轴3、叶片4、轨道环支架5、叶片支架6、叶片远端轴承7、轨道环8、叶片分配轮12、主动摇臂13、从动摇臂14、活动拉杆15、摇臂支架 16组成。
21.其中,发动机2固定在支架1上,发动机转动轴和联轴器相连,联轴器、叶片支架6、摇臂支架16、叶片远端轴承7分别固定安装在主轴3上,轨道环8固定在轨道环支架5上,轨道环支架5固定在支架1上,主轴3贯穿轨道环支架5中心的孔,轨道环8是凹槽形的,摇臂支架16上设置有主动摇臂 13和从动摇臂14,主动摇臂13和从动摇臂14通过活动拉杆15相互连
接,主动摇臂13上有一个7字形突出部9,7字形突出部9上有一个凸出小轴11,凸出小轴11上设置有轴承10,轴承10位于轨道环8的凹槽中,并可在轨道环8中运动,主动摇臂13和从动摇臂14上分别安装有叶片分配轮12,叶片 4一端固定安装在叶片分配轮12上,另一端安装在叶片支架6上。
22.如图2所示,在本发明的一个实施例中,摇臂支架16、叶片支架6是十字形的。十字形的摇臂支架16上的每条边上均设置有1个主动摇臂13和2 个从动摇臂14,2个从动摇臂14分别设置在主动摇臂13的两侧。也可以根据需要增加从动摇臂的数量从而增加叶片的数量和叶片形成的扇叶面积。
23.当发动机2带动主轴3转动工作时,摇臂支架16转动运行,使主动摇臂 13上的凸出小轴11上的轴承10沿着轨道环8的凹槽运动,轴承10运动的同时,受到轨道环8的形状控制,带动主动摇臂13转动,主动摇臂13通过活动拉杆15带动从动摇臂14转动,从而使主动摇臂13和从动摇臂14上的叶片分配轮12同步转动,实现叶片4的同步开合形成旋转扑翼。
24.如图3所示,轨道环8为经过仿真计算的不规则环形凹槽轨道环,轨道环8由上下两段圆弧形和两侧连接两段圆弧形的直线段组成,并且上部的圆弧形半径大于下部的圆弧形半径。轴承10沿着轨道环8的凹槽运行,当遇到轨道圆弧路径改变处时,可实现叶片从0到90度旋转;多个叶片可组成分段式自组合扇叶,叶片从0到90度的旋转实现分段式自组合扇叶的旋转扑翼,达到了产生垂直起降的动力效果。通过凹轨控制和分组叶片构成的系统,在轨道固有轨迹的控制下叶片在下扑时自动组合成一个整体下压做功,在另外半个过程中则叶片收起与空气不发生作用,这样在一个循环周期内不断的做功和收起相互交替进行,使整个机器获得一个有效的向上抬升的动力,使整机飞行器取得垂直起降的效果。
25.如图4、图5、图6所示,本发明的凹轨控制旋转扑翼动力装置,可以根据实际需要以多种方式对称安装应用在不同飞行器上,为飞行器提供垂直起降的动力。
26.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均包含在本发明的保护范围之内。