1.本技术属于飞机主操纵系统疲劳试验技术领域,具体涉及一种飞机左右脚蹬双脚刹车疲劳试验及其监测方法。
背景技术:
2.对飞机主操纵系统施加飞机操纵载荷及位移协调加载谱,对飞机主操纵系统进行疲劳控制加载,进行飞机主操纵系统的疲劳试验,是考核飞机主操纵系统疲劳寿命及性能指标的重要手段。
3.飞机操纵载荷及位移协调加载谱中,包括动态疲劳谱载、左右脚蹬双脚刹车谱载、静态疲劳谱载。
4.动态疲劳谱载中包括单向操纵谱载、复合操纵谱载,其中,单向操纵谱载包括通过副翼驾驶杆左偏/右偏进行加载的副翼单向操纵谱载、通过平尾驾驶杆前推/后拉进行加载的平尾单向操纵谱载、左右脚蹬单独向前进行加载的方向舵单向操纵谱载;复合操纵谱载为副翼单向操纵谱载、平尾单向操纵谱载、方向舵单向操纵谱载中两个或三个的综合。
5.左右脚蹬双脚刹车谱载通过左右脚蹬同时向前进行加载。
6.静态疲劳谱载中包括单向操纵谱载、复合操纵谱载,其中,单向操纵谱载包括通过副翼驾驶杆左偏/右偏进行加载的副翼单向操纵谱载、通过平尾驾驶杆前推/后拉进行加载的平尾单向操纵谱载、左右脚蹬单独向前进行加载的方向舵单向操纵谱载;复合操纵谱载为副翼单向操纵谱载、平尾单向操纵谱载、方向舵单向操纵谱载中两个或三个的综合。
7.对左右脚蹬施加左右脚蹬双脚刹车谱载,进行左右脚蹬双脚刹车疲劳试验,当前,多是将左右脚蹬刹车机构前端位置予以断开,安装假件,以连接左右脚蹬的刹车摇臂及拉杆作为疲劳试验的支持件,该种技术方案存在以下缺陷:
8.1)仅是左右脚蹬在固定位置条件下,承受左右脚蹬双脚刹车谱载,属于静态疲劳试验的范畴,将刹车承载作为主要的考核对象,而左右脚蹬双脚刹车疲劳试验应该是,施加飞机操纵载荷及位移协调加载谱中左右脚蹬双脚刹车谱载,对系统疲劳寿命及其性能指标进行验证的动态疲劳试验;
9.2)在进行左右脚蹬双脚刹车疲劳试验时,通常也需要进行方向舵的疲劳试验,其设置影响左右脚蹬单独向前对方向舵操纵谱载的施加,难以一并进行方向舵的疲劳试验。
10.此外,在对左右脚蹬施加左右脚蹬双脚刹车谱载,进行左右脚蹬双脚刹车疲劳试验时,左右脚蹬上加载控制点偏离加载要求,左右脚蹬自中立位置向前刹车施力的航向间隙超标,左右脚蹬前后运动时的相对间隙超标,以及零件的磨损、松动,都会引起左右脚蹬的刹车载荷状态异常,左右脚蹬的刹车载荷状态异常,影响左右脚蹬双脚刹车谱载的准确加载,使对左右脚蹬双脚刹车疲劳试验无效,且会对其它的飞机主操纵系统疲劳产生不利影响,若在试验过程中不能够及时的发现、处理,会造成大量人力、物力、财力的浪费,延长试验周期,甚至于发生危险事故,而当前对此缺少便捷、可靠的监测手段。
11.鉴于上述技术缺陷的存在提出本技术。
12.需注意的是,以上背景技术内容的公开仅用于辅助理解本发明的发明构思及技术方案,其并不必然属于本专利申请的现有技术,在没有明确的证据表明上述内容在本技术的申请日已经公开的情况下,上述背景技术不应当用于评价本技术的新颖性和创造性。
技术实现要素:
13.本技术的目的是提供一种飞机左右脚蹬双脚刹车疲劳试验及其监测方法,以克服或减轻已知存在的至少一方面的技术缺陷。
14.本技术的技术方案是:
15.一方面提供一种飞机左右脚蹬双脚刹车疲劳试验方法,包括:
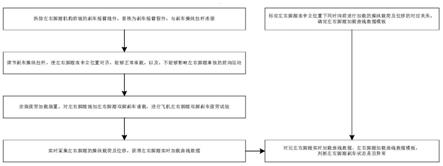
16.拆除左右脚蹬机构前端的刹车摇臂组件,替换为刹车摇臂假件,与刹车操纵拉杆连接;
17.调节刹车操纵拉杆,使左右脚蹬在中立位置对齐,能够正常承载,以及,不能够影响左右脚蹬单独的前向运动;
18.安装疲劳加载装置,对左右脚蹬施加左右脚蹬双脚刹车谱载,进行飞机左右脚蹬双脚刹车疲劳试验。
19.根据本技术的至少一个实施例,上述的飞机左右脚蹬双脚刹车疲劳试验方法中,对左右脚蹬施加左右脚蹬双脚刹车谱载时,对其中一个脚蹬的加载方式为力控、位移监视,对另一个脚蹬的加载方式为位控、力监视。
20.根据本技术的至少一个实施例,上述的飞机左右脚蹬双脚刹车疲劳试验方法中,还包括:
21.对飞机通电、通压,分别在方向舵操纵系统大速度、小速度状态下,对左右脚蹬在中立位置下同时向前进行加载,以验证左右脚蹬在中立位置下能否正常承载,以及,对左右脚蹬单独向前进行加载,以验证左右脚蹬单独的前向运动是否受影响。
22.另一方面提供一种飞机左右脚蹬双脚刹车疲劳试验监测方法,包括:
23.标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板;
24.飞机左右脚蹬双脚刹车疲劳试验中,实时采集左右脚蹬的操纵载荷及位移,获得左右脚蹬实时加载曲线数据;
25.对比左右脚蹬实时加载曲线数据、左右脚蹬加载曲线数据模板,若左右脚蹬实时加载曲线数据与左右脚蹬加载曲线数据模板相符,则表明左右脚蹬刹车载荷状态正常;
26.若左右脚蹬实时加载曲线数据与左右脚蹬加载曲线数据模板不相符,则表明左右脚蹬刹车载荷状态异常。
27.根据本技术的至少一个实施例,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法中,所述标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板,具体是:
28.对应于地面实测刹车谱载、地面维护刹车谱载,对左右脚蹬进行加载,标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板。
29.根据本技术的至少一个实施例,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法
中,还包括:
30.选定左右脚蹬刹车操纵载荷及位移测量标识点;
31.所述实时采集左右脚蹬的操纵载荷及位移,具体为:
32.实时采集对应于左右脚蹬刹车操纵载荷及位移测量标识点的操纵载荷及位移。
33.根据本技术的至少一个实施例,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法中,所述选定左右脚蹬刹车操纵载荷及位移测量标识点,具体为:
34.对应于地面实测小刹车载荷情况、地面实测中刹车载荷情况、地面实测大刹车载荷情况、地面维护小刹车载荷情况、地面维护大刹车载荷情况,选定左右脚蹬刹车操纵载荷及位移测量标识点。
35.根据本技术的至少一个实施例,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法中,所述标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板,具体为:
36.在疲劳加载装置安装前和/或在疲劳加载装置安装后,标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板。
附图说明
37.图1是本技术实施例提供的飞机左右脚蹬双脚刹车疲劳试验及其监测方法的流程图;
38.图2是本技术实施例提供的拆除左右脚蹬机构前端的刹车摇臂组件,替换为刹车摇臂假件,与刹车操纵拉杆连接的示意图。
39.图3是本技术实施例提供的左右脚蹬加载曲线数据模板的示意图。
40.为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;此外,附图用于示例性说明,其中描述位置关系的用语仅限于示例性说明,不能理解为对本专利的限制。
具体实施方式
41.为使本技术的技术方案及其优点更加清楚,下面将结合附图对本技术的技术方案作进一步清楚、完整的详细描述,可以理解的是,此处所描述的具体实施例仅是本技术的部分实施例,其仅用于解释本技术,而非对本技术的限定。需要说明的是,为了便于描述,附图中仅示出了与本技术相关的部分,其他相关部分可参考通常设计,在不冲突的情况下,本技术中的实施例及实施例中的技术特征可以相互组合以得到新的实施例。
42.此外,除非另有定义,本技术描述中所使用的技术术语或者科学术语应当为本技术所属领域内一般技术人员所理解的通常含义。本技术描述中所使用的“上”、“下”、“左”、“右”、“中心”、“竖直”、“水平”、“内”、“外”等表示方位的词语仅用以表示相对的方向或者位置关系,而非暗示装置或元件必须具有特定的方位、以特定的方位构造和操作,当被描述对象的绝对位置发生改变后,其相对位置关系也可能发生相应的改变,因此不能理解为对本技术的限制。本技术描述中所使用的“第一”、“第二”、“第三”以及类似用语,仅用于描述目的,用以区分不同的组成部分,而不能够将其理解为指示或暗示相对重要性。本技术描述中所使用的“一个”、“一”或者“该”等类似词语,不应理解为对数量的绝对限制,而应理解为存
在至少一个。本技术描述中所使用的“包括”或者“包含”等类似词语意指出现在该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
43.此外,还需要说明的是,除非另有明确的规定和限定,在本技术的描述中使用的“安装”、“相连”、“连接”等类似词语应做广义理解,例如,连接可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,还可以是两个元件内部的连通,领域内技术人员可根据具体情况理解其在本技术中的具体含义。
44.下面结合附图1至图3对本技术做进一步详细说明。
45.一方面提供一种飞机左右脚蹬双脚刹车疲劳试验方法,包括:
46.拆除左右脚蹬机构前端的刹车摇臂组件,替换为刹车摇臂假件,与刹车操纵拉杆连接,刹车摇臂假件可利用刹车摇臂组件在驾驶舱底板上的连接孔进行固定安装;
47.调节刹车操纵拉杆,使左右脚蹬在中立位置对齐,能够正常承载,以及,不能够影响左右脚蹬单独的前向运动,即不能够影响左右脚蹬对方向舵操纵的前后相对运动;
48.安装疲劳加载装置,对左右脚蹬施加左右脚蹬双脚刹车谱载,进行飞机左右脚蹬双脚刹车疲劳试验。
49.对于上述实施例公开的飞机左右脚蹬双脚刹车疲劳试验方法,领域内技术人员可以理解的是,其设计以刹车摇臂假件代替左右脚蹬机构前端的刹车摇臂组件,与刹车操纵拉杆连接,通过对刹车操纵拉杆,使左右脚蹬在中立位置对齐,能够正常承载,以对左右脚蹬施加左右脚蹬双脚刹车谱载,进行左右脚蹬双脚刹车疲劳试验,考核系统疲劳寿命及其性能指标的需求,以及,不影响左右脚蹬单独的前向运动,以不影响左右脚蹬单独向前对方向舵操纵谱载的施加,可一并进行方向舵的疲劳试验。
50.在一些可选的实施例中,上述的飞机左右脚蹬双脚刹车疲劳试验方法中,对左右脚蹬施加左右脚蹬双脚刹车谱载时,对其中一个脚蹬的加载方式为力控、位移监视,对另一个脚蹬的加载方式为位控、力监视,以避免出现左右脚蹬来回踏步的情形。
51.在一些可选的实施例中,上述的飞机左右脚蹬双脚刹车疲劳试验方法中,还包括:
52.对飞机通电、通压,分别在方向舵操纵系统大速度、小速度状态下,对左右脚蹬在中立位置下同时向前进行加载,以验证左右脚蹬在中立位置下能否正常承载,以及,对左右脚蹬单独向前进行加载,以验证左右脚蹬单独的前向运动是否受影响。
53.另一方面提供一种飞机左右脚蹬双脚刹车疲劳试验监测方法,包括:
54.标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板;
55.飞机左右脚蹬双脚刹车疲劳试验中,实时采集左右脚蹬的操纵载荷及位移,获得左右脚蹬实时加载曲线数据;
56.对比左右脚蹬实时加载曲线数据、左右脚蹬加载曲线数据模板,若左右脚蹬实时加载曲线数据与左右脚蹬加载曲线数据模板相符,则表明左右脚蹬刹车载荷状态正常,此时可继续进行机左右脚蹬双脚刹车疲劳试验,直至完成;
57.若左右脚蹬实时加载曲线数据与左右脚蹬加载曲线数据模板不相符,超出稳定范围,则表明左右脚蹬刹车载荷状态异常,此时应暂停左右脚蹬双脚刹车疲劳试验,在对异常
情形处理后,再重启左右脚蹬双脚刹车疲劳试验。
58.对于上述实施例公开的飞机左右脚蹬双脚刹车疲劳试验方法,领域内技术人员可以理解的是,其对左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系进行了标定,确定左右脚蹬加载曲线数据模板,包含加载曲线幅值数据及曲线形状特征,反映载荷及位移历程关系,在加载方式确定的情形下是一定的,为固有特征。
59.对于上述实施例公开的飞机左右脚蹬双脚刹车疲劳试验方法,领域内技术人员还可以理解的是,在飞机左右脚蹬双脚刹车疲劳试验中,实时采集左右脚蹬的操纵载荷及位移,获得左右脚蹬实时加载曲线数据,与左右脚蹬加载曲线数据模板进行对比,通过对左右脚蹬实时加载曲线数据是否与左右脚蹬加载曲线数据模板相符,判断左右脚蹬刹车载荷状态正常,以此在左右脚蹬刹车载荷状态出现异常时,快速的判断得出,
60.可快速的得出左右脚蹬刹车载荷状态是否异常,以此能够,及时的进行相关处理,避免造成人力、物力、财力的浪费,缩短试验周期,以及避免危险事故的发生。
61.在一些可选的实施例中,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法中,所述标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板,具体是:
62.对应于地面实测刹车谱载、地面维护刹车谱载,对左右脚蹬进行加载,标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板。
63.在一些可选的实施例中,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法中,还包括:
64.选定左右脚蹬刹车操纵载荷及位移测量标识点;
65.所述实时采集左右脚蹬的操纵载荷及位移,具体为:
66.实时采集对应于左右脚蹬刹车操纵载荷及位移测量标识点的操纵载荷及位移。
67.对于上述实施例公开的飞机左右脚蹬双脚刹车疲劳试验方法,领域内技术人员可以理解的是,其设计对左右脚蹬操纵载荷及位移的实时采集,对应于左右脚蹬刹车操纵载荷及位移测量标识点进行,具有较高的采集效率,且对应于左右脚蹬刹车操纵载荷及位移测量标识点的左右脚蹬的操纵载荷及位移数据,在左右脚蹬刹车载荷状态出现异常时,变化明显,基于此可容易的判断得出左右脚蹬刹车载荷状态是否出现异常。
68.在一些可选的实施例中,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法中,所述选定左右脚蹬刹车操纵载荷及位移测量标识点,具体为:
69.对应于地面实测小刹车载荷情况、地面实测中刹车载荷情况、地面实测大刹车载荷情况、地面维护小刹车载荷情况、地面维护大刹车载荷情况,选定左右脚蹬刹车操纵载荷及位移测量标识点。
70.对于上述实施例公开的飞机左右脚蹬双脚刹车疲劳试验方法,领域内技术人员可以理解的是,地面实测小刹车载荷情况、地面实测中刹车载荷情况、地面实测大刹车载荷情况,是对地面刹车实测谱载分级的结果,可以根据具体谱载幅值及频次情况增加或减少分级处理得到,地面维护小刹车载荷情况、地面维护大刹车载荷情况与地面实测小刹车载荷情况、地面实测中刹车载荷情况、地面实测大刹车载荷情况的谱载的幅值及频次不完全对应,一般而言,地面维护小刹车载荷情况要大于地面实测大刹车载荷情况谱载的幅值。
71.对于上述实施例公开的飞机左右脚蹬双脚刹车疲劳试验方法,领域内技术人员可以理解的是,对于大刹车情况的监控分析,可主要看操纵载荷是否在安装间隙或变形范围内,呈设计名义值正常的线弹性变化,以判断左右脚蹬上加载控制点是否偏离加载要求、左右脚蹬自中立位置向前刹车施力的航向间隙是否超标,以及左右脚蹬前后运动时的相对间隙是否超标,小载荷情况下,零件松动、磨损对操纵载荷及位移关系曲线较为敏感,对小刹车情况的监控分析,可主要用于对零件松动、磨损的监控检查。
72.在一些可选的实施例中,上述的飞机左右脚蹬双脚刹车疲劳试验监测方法中,所述标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板,具体为:
73.在疲劳加载装置安装前和/或在疲劳加载装置安装后,标定左右脚蹬在中立位置下同时向前进行加载的操纵载荷及位移的对应关系,确定左右脚蹬加载曲线数据模板,由疲劳加载装置安装前,满足飞机设计要求的方向舵大、小速度状态下左右脚蹬刹车载荷及位移关系曲线,标定为疲劳加载装置安装后,双脚刹车疲劳试验中稳定正常的左右脚蹬刹车载荷及位移关系曲线,形成监测分析的数据模板。
74.说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
75.至此,已经结合附图所示的优选实施方式描述了本技术的技术方案,领域内技术人员应该理解的是,本技术的保护范围显然不局限于这些具体实施方式,在不偏离本技术的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本技术的保护范围之内。