1.本发明涉及无人机飞行器技术领域,更具体地,涉及一种便携式无人机折叠机臂结构。
背景技术:
2.目前,无人机按照机臂安装方式包括固定式和折叠式机型。固定式机型的无人机,机臂承载力较大,机臂可以安装较大尺寸的桨叶,进而实现携带大尺寸云台、以及高起落架的飞行任务。折叠式机型的无人机,由于机臂可折叠,所以方便收纳与携带,深受广大无人机爱好者的喜爱。但是,折叠式机型在收纳状态时,机臂仍不能完全缩进机身。前后两机臂的自由端相互抵触,使得位于该处的桨叶露出至机身外部,存在误碰损伤的缺陷。现有技术为了更好的收纳机臂,对机臂的折叠方式作出了改进。例如,申请号为cn201821693574.1,主题为一种机翼旋转折叠的无人机的中国发明专利,如图1所示,其包括机身、机臂、升降螺旋体、旋转体,所述升降螺旋体设置于所述机身内,所述机臂与所述旋转体固定连接,所述旋转体旋转与所述升降螺旋旋转升降配合。通过旋转升降方式,使机翼可以旋转式折叠。
3.虽然,该技术方案通过升降、水平旋转的方式,改进了无人机机臂收纳折叠时,两机臂自由端存在重叠、相抵的问题。但是,该技术方案中前后机臂上下叠置时,两机臂间仍留有较多空隙,配合不够紧密、整齐,在结构紧凑性方面仍存在缺陷。
技术实现要素:
4.本发明的首要目的在于针对上述缺陷和不足,提供一种采用翻转结构使得机身结构整齐、配合紧密、体积小、便于携带和收纳的无人机折叠机臂结构。
5.为了实现上述目的,本发明采用的具体技术方案为:
6.本发明所述的便携式无人机折叠机臂结构,包括机身、端部设有第一桨叶且与机身连接的第一机臂、以及端部设有第二桨叶且与机身连接的第二机臂;所述第一机臂通过翻转结构与机身连接,以实现第一机臂上下翻转并收纳于机身;所述第二机臂通过第二机臂折叠结构与机身连接,以实现第二机臂沿机身横向收纳于机身;收纳时,第一机臂翻转使得第一桨叶上下反向,第二机臂横向折叠同时第二桨叶保持上下方向不变,最终第一桨叶与第二桨叶呈背靠结构,以实现两机臂紧密配合。
7.本发明中第一机臂与第二机臂意指两机臂无特定的前后关系,例如,第一机臂为前机臂,则第二机臂为后机臂,再如,第一机臂为后机臂,则第二机臂为前机臂。
8.所述翻转结构包括设在第一机臂上的翻转连接件、以及设在机身上与翻转连接件配合且沿机身横向倾斜设置的翻转承接座,以实现第一机臂翻转的同时可靠向机身。其中,横向是指朝着机身左右方向。
9.在另一种优选实施方式中,所述翻转结构包括设在第一机臂上的翻转连接件、以及设在机身上与翻转连接件配合的翻转承接座;所述翻转承接座通过第一机臂折叠结构与第一机臂连接,以实现第一机臂翻转的同时可靠向机身。该优选实施方式中,翻转承接座可
不必倾斜设置,同时通过设置第一机臂折叠结构可以使得机臂具有更大的横向摆动调节范围。
10.进一步的,所述第一机臂折叠结构由设置于翻转连接件上的折叠槽、以及设置在第一机臂上与折叠槽转动连接的折叠连接件组成。
11.为了更好的控制第一机臂的收纳与展开,所述翻转连接件通过用于控制第一机臂转动的第一卡合结构与机身连接;所述第二机臂通过用于控制第二机臂转动的第二卡合结构与机身连接。
12.进一步的,所述翻转连接件包括伸缩端部;所述第一卡合结构包括设置在伸缩端部上可随伸缩端部运动的第一卡合件、以及固定设置在机身上与第一卡合件配合的第二卡合件;通过伸缩端部的插入或拔出实现第一卡合件与第二卡合件的离合,进而实现第一机臂的位置固定。
13.进一步的,所述第一卡合件包括第一环体、以及设在第一环体上的凸起;所述第二卡合件包括第二环体、以及设在第二环体上与凸起配合的凹槽,所述第二环体与机身固定连接。
14.进一步的,所述伸缩端部上穿过第二环体的位置设有限位结构,该限位结构用于防止伸缩端部拔出距离过大造成的第一机臂与机身的分离。
15.进一步的,所述翻转承接座为通孔;所述伸缩端部穿过通孔伸入至机身内部;所述第二卡合件固定设置在机身内部。
16.为了获得配合更加紧密的结构,所述第一桨叶通过第一桨叶安装部与机臂连接,所述第二桨叶通过第二桨叶安装部与机臂连接;所述第一桨叶安装部与第二桨叶安装部的背对侧分别设有相互配合的缺口部,以实现第一机臂与第二机臂收纳状态时配合紧密;优选的,所述缺口部为从第一机臂或第二机臂顶端沿纵轴线方向延伸形成的l型缺口结构。其中,纵轴线方向为沿机臂的长度方向。
17.本发明所述的方便识别飞行中无人机机头和机尾的无人机折叠机臂结构,为了方便识别机头和机尾,所述第一机臂或第二机臂上设有导航灯,所述机身底部远离第一机臂或第二机臂一侧设有异于导航灯的导航灯,通过导航灯与导航灯可识别飞行中无人机的机头和机尾。
18.在优选实施方式中,所述导航灯异于导航灯的发光强度或发光颜色。
19.进一步的,所述导航灯的发光元件数量小于导航灯。
20.通过设置在机臂与机身底部相异的两组导航灯,可有效识别飞行中无人机的飞行方向。
21.本发明与现有技术相比,具有以下有益效果:
22.本发明采用翻转结构实现第一机臂竖直翻转的方式收纳于机身,第二机臂仅水平折叠向机身。第一机臂在翻转的过程中位于机臂上的桨叶反向于使用状态时的桨叶,也反向于第二机臂上的桨叶,这样第一机臂与第二机臂收纳时可完全贴合,结构整齐,克服了传统技术中机臂叠置空隙大、桨叶错落空间利用率低的技术问题。
23.基于此,本发明通过改进折叠机臂结构,避免了桨叶在收纳时的空间交错,传统的携带大尺寸云台的无人机通常采用固定安装机臂结构,因为传统的技术方案的折叠机臂方式为前后机臂水平折叠,本发明的技术方案改进机臂折叠方式,可在折叠机臂的基础上安
装大桨叶,为实现携带大尺寸无人机可折叠机臂的方式打下基础。
24.下面结合附图对本发明作进一步的说明。
附图说明
25.图1为现有技术无人机折叠机臂结构示意图。
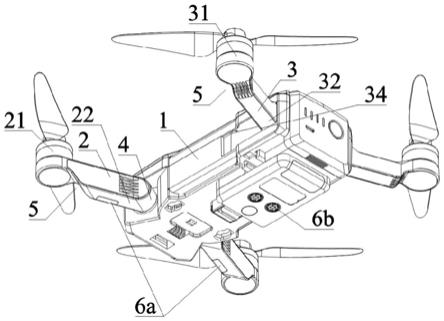
26.图2为本发明优选实施方式中机臂展开结构示意图。
27.图3为本发明优选实施方式中第一机臂结构示意图。
28.图4为本发明优选实施方式中第一机臂翻转方式结构示意图。
29.图5为本发明优选实施方式中机臂收纳结构示意图。
30.图6为本发明优选实施方式中机臂收纳侧视结构示意图。
31.图7为本发明优选实施方式中机臂与机身连接内部结构示意图。
32.图8为本发明优选实施方式中另一种翻转方式结构示意图。
33.图9为本发明优选实施方式中卡合结构爆炸结构示意图。
34.附图标记说明:
35.1机身、11翻转承接座、2第一机臂、21第一桨叶安装部、22第一机身连接端、3第二机臂、31第二桨叶安装部、32第二机身连接端、33第二卡合结构、34第二机臂折叠结构、4翻转结构、41翻转连接件、42第一机臂折叠结构、43第一卡合结构、421折叠槽、422折叠连接件、411伸缩端部、431第一卡合件、432第二卡合件、4311第一环体、4312凸起、4321第二环体、4322凹槽、4111限位结构、5缺口部、6a导航灯、6b导航灯。
具体实施方式
36.下面通过具体实施方式对本发明做进一步的解释及说明,应当理解下面的实施方式的目的是为了使本发明的技术方案更加清楚、易于理解,并不限制权利要求的保护范围。
37.如图2所示,本发明所述的便携式无人机折叠机臂结构,包括机身1、端部设有第一桨叶安装部21且与机身1连接的第一机臂2、以及端部设有第二桨叶安装部31且与机身1连接的第二机臂3。第一桨叶安装部21上安装有第一桨叶;第二桨叶安装部31上安装有第二桨叶。
38.第一机臂2通过翻转结构4与机身1连接,以实现第一机臂2上下翻转并收纳于机身1;第二机臂3通过第二机臂折叠结构34(因为该结构属于常规结构,因此在图2、7中仅示意出位置,而没有示意具体结构。)与机身1连接,以实现第二机臂3沿机身横向收纳于机身1。收纳时,第一机臂2翻转使得第一桨叶安装部21上下反向,同时第一桨叶的方向发生反向转动,第二机臂3横向折叠使得第二桨叶安装部31保持上下方向不变,同时第二桨叶的上下方向保持不变,最终第一桨叶与第二桨叶呈背对结构,以实现两机臂紧密配合。
39.如图3所示,在优选的实施方式中,所述翻转结构翻转连接件4翻转连接件包括设在第一机臂翻转连接件2翻转连接件上的翻转连接件翻转连接件41翻转连接件、以及设在机身翻转连接件1翻转连接件上与翻转连接件翻转连接件41翻转连接件配合的翻转承接座翻转连接件11翻转连接件;所述翻转承接座翻转连接件11翻转连接件通过第一机臂折叠结构翻转连接件42翻转连接件与第一机臂翻转连接件2翻转连接件连接,以实现第一机臂翻转连接件2翻转连接件翻转的同时可靠向机身翻转连接件1翻转连接件。
40.如图7所示,在优选的实施方式中,翻转连接件翻转连接件41翻转连接件通过用于控制第一机臂2转动的第一卡合结构43与机身1连接;第二机臂3通过用于控制第二机臂3转动的第二卡合结构33与机身1连接。
41.如图9所示,在优选的实施方式中,翻转连接件41包括伸缩端部411;第一卡合结构43包括设置在伸缩端部411上可随伸缩端部411运动的第一卡合件431、以及固定设置在机身1上与第一卡合件431配合的第二卡合件432;通过伸缩端部411的插入或拔出实现第一卡合件431与第二卡合件432的离合,进而实现第一机臂2的位置固定。第一卡合件431包括第一环体4311、以及设在第一环体4311上的凸起4312;第二卡合件432包括第二环体4321、以及设在第二环体4321上与凸起4312配合的凹槽4322,第二环体4321与机身1固定连接。伸缩端部411上穿过第二环体4321的位置设有限位结构4111,该限位结构4111用于防止伸缩端部411拔出距离过大造成的第一机臂2与机身1的分离。机身1上与翻转连接件41连接处设有通孔11;伸缩端部411穿过通孔11伸入至机身1内部;第二卡合件432固定设置在机身1内部。
42.如图4~7所示,在优选的实施方式中,为了获得配合更加紧密的结构,第一桨叶安装部21与第二桨叶安装部31的背对侧分别设有相互配合的缺口部5,以实现第一机臂2与第二机臂3收纳状态时配合紧密。进一步的,缺口部5为从机臂顶端沿纵轴线方向延伸形成的l型缺口结构。
43.如图2所示,在优选的实施方式中,为了方便识别机头和机尾,第一机臂2或第二机臂3上设有导航灯6a,机身1底部远离第一机臂2或第二机臂3一侧设有异于导航灯6a的导航灯6b,通过导航灯6a与导航灯6b可识别飞行中无人机的机头和机尾。
44.在优选实施方式中,导航灯6a异于导航灯6b的发光强度或发光颜色。进一步的,导航灯6a的发光元件数量为1个,导航灯6b的发光元件数量为4个。
45.本发明的工作原理如下:
46.当需要收纳无人机时,将处于展开状态的第一机臂2翻转,通过倾斜于机身横轴方向翻转连接件41第一机臂2经过翻转即可实现向机身1的靠拢。翻转的同时位于第一机臂2端侧的第一桨叶安装部21由上至下反转,方便与第二机臂3配合,结构紧密空间利用率高。之后,第二机臂2水平折叠向机身。第一机臂2与第二机臂3上的缺口部,使得两机臂配合更加紧密,结构更加紧凑。
47.实施例2
48.如图8所示,在另一种优选实施方式中,所述翻转结构翻转连接件4翻转连接件包括设在第一机臂翻转连接件2翻转连接件上的翻转连接件翻转连接件41翻转连接件、以及设在机身翻转连接件1翻转连接件上与翻转连接件翻转连接件41翻转连接件配合的翻转承接座翻转连接件11翻转连接件;所述翻转承接座翻转连接件11翻转连接件通过第一机臂折叠结构翻转连接件42翻转连接件与第一机臂翻转连接件2翻转连接件连接,以实现第一机臂翻转连接件2翻转连接件翻转的同时可靠向机身翻转连接件1翻转连接件。该优选实施方式中,翻转连接件41可不必倾斜设置,同时通过设置第一机臂折叠结构42可以使得机臂具有更大的横向摆动调节范围。进一步的,第一机臂折叠结构42由设置于翻转连接件41上的折叠槽421、以及设置在第一机臂2上与折叠槽421转动连接的折叠连接件422组成。
49.本发明是通过实施例来描述的,但并不对本发明构成限制,参照本发明的描述,所公开的实施例的其他变化,如对于本领域的专业人士是容易想到的,这样的变化应该属于
本发明权利要求限定的范围之内。